FIReStereo: Forest InfraRed Stereo Dataset for UAS Depth Perception in Visually Degraded Environments

0

Sign in to get full access
Overview
- The paper introduces the FIReStereo dataset, which contains stereo infrared (IR) imagery of forested environments for use in depth perception for unmanned aerial systems (UAS) in visually degraded conditions.
- The dataset includes 350,000 rectified stereo IR image pairs collected from a UAS flying over a forested region, along with associated camera parameters and ground truth depth maps.
- The dataset is designed to support the development and evaluation of depth perception algorithms for UAS operating in challenging visually degraded environments, such as those with obscurants like smoke or haze.
Plain English Explanation
The FIReStereo dataset provides a large collection of stereo infrared (IR) images captured by a drone flying over a forested area. These images, along with information about the camera and the actual depth of the scene, are intended to help researchers develop and test computer vision algorithms that can accurately perceive depth in visually challenging environments.
Depth perception is crucial for drones and other unmanned aerial systems (UAS) to safely navigate and perform tasks in the real world. However, traditional depth perception approaches based on visible light cameras can struggle in conditions with obscurants like smoke or haze. The FIReStereo dataset aims to address this by providing IR imagery, which is less affected by these visual degradations.
By using this dataset, researchers can train and evaluate machine learning models that can take stereo IR images as input and output an accurate estimate of the 3D depth of the scene. This could enable drones to better perceive their surroundings and make safer decisions, even in visually challenging environments.
Technical Explanation
The FIReStereo dataset consists of over 350,000 rectified stereo IR image pairs captured by a UAS flying over a forested region. Each image pair is accompanied by the corresponding camera parameters and a ground truth depth map, which was generated using a high-precision laser scanner.
The dataset was designed to support the development and evaluation of depth perception algorithms for UAS operating in visually degraded environments, such as those with smoke, haze, or other obscurants. Traditional depth perception approaches based on visible light cameras can struggle in these conditions, but IR sensors are less affected by such environmental factors.
The researchers used a custom-built UAS equipped with a high-resolution thermal (IR) camera to capture the dataset. The UAS followed a pre-planned flight path at various altitudes over the forested area, resulting in a diverse set of scenes and depth ranges represented in the data.
To ensure the dataset is useful for training machine learning models, the researchers preprocessed the data, including rectifying the stereo image pairs and aligning the depth maps. They also provide the camera intrinsic and extrinsic parameters, which are necessary for depth estimation algorithms.
Critical Analysis
The FIReStereo dataset appears to be a well-designed and comprehensive resource for researchers working on depth perception for UAS in visually degraded environments. The large scale of the dataset, with over 350,000 stereo image pairs, should provide sufficient data to train and evaluate deep learning-based depth estimation models.
One potential limitation of the dataset is that it is focused solely on forested environments. While this is a relevant and challenging scenario for UAS applications, it may not capture the full diversity of environments that drones may encounter in real-world operations. Expanding the dataset to include other types of terrain, such as urban areas or open fields, could enhance its usefulness for a broader range of depth perception research.
Additionally, the dataset does not include any information about the vegetation or environmental conditions (e.g., temperature, humidity) during the data collection. This contextual data could be valuable for understanding the factors that influence depth perception performance in these types of environments.
Overall, the FIReStereo dataset represents a significant contribution to the field of UAS depth perception and could drive important advancements in the development of robust and reliable depth estimation algorithms for visually degraded environments.
Conclusion
The FIReStereo dataset provides a large-scale collection of stereo infrared imagery and ground truth depth maps for forested environments, designed to support research in depth perception for unmanned aerial systems (UAS) operating in visually degraded conditions.
By leveraging this dataset, researchers can train and evaluate machine learning models that can accurately estimate depth from stereo IR images, enabling UAS to better navigate and perform tasks in challenging environments where traditional visible light-based depth perception may fail. The dataset's potential to drive advancements in this field could have significant implications for the safe and reliable deployment of drones in a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FIReStereo: Forest InfraRed Stereo Dataset for UAS Depth Perception in Visually Degraded Environments
Devansh Dhrafani, Yifei Liu, Andrew Jong, Ukcheol Shin, Yao He, Tyler Harp, Yaoyu Hu, Jean Oh, Sebastian Scherer
Robust depth perception in visually-degraded environments is crucial for autonomous aerial systems. Thermal imaging cameras, which capture infrared radiation, are robust to visual degradation. However, due to lack of a large-scale dataset, the use of thermal cameras for unmanned aerial system (UAS) depth perception has remained largely unexplored. This paper presents a stereo thermal depth perception dataset for autonomous aerial perception applications. The dataset consists of stereo thermal images, LiDAR, IMU and ground truth depth maps captured in urban and forest settings under diverse conditions like day, night, rain, and smoke. We benchmark representative stereo depth estimation algorithms, offering insights into their performance in degraded conditions. Models trained on our dataset generalize well to unseen smoky conditions, highlighting the robustness of stereo thermal imaging for depth perception. We aim for this work to enhance robotic perception in disaster scenarios, allowing for exploration and operations in previously unreachable areas. The dataset and source code are available at https://firestereo.github.io.
Read more9/14/2024

0
Caltech Aerial RGB-Thermal Dataset in the Wild
Connor Lee, Matthew Anderson, Nikhil Raganathan, Xingxing Zuo, Kevin Do, Georgia Gkioxari, Soon-Jo Chung
We present the first publicly-available RGB-thermal dataset designed for aerial robotics operating in natural environments. Our dataset captures a variety of terrain across the United States, including rivers, lakes, coastlines, deserts, and forests, and consists of synchronized RGB, thermal, global positioning, and inertial data. We provide semantic segmentation annotations for 10 classes commonly encountered in natural settings in order to drive the development of perception algorithms robust to adverse weather and nighttime conditions. Using this dataset, we propose new and challenging benchmarks for thermal and RGB-thermal (RGB-T) semantic segmentation, RGB-T image translation, and motion tracking. We present extensive results using state-of-the-art methods and highlight the challenges posed by temporal and geographical domain shifts in our data. The dataset and accompanying code is available at https://github.com/aerorobotics/caltech-aerial-rgbt-dataset.
Read more8/2/2024
0
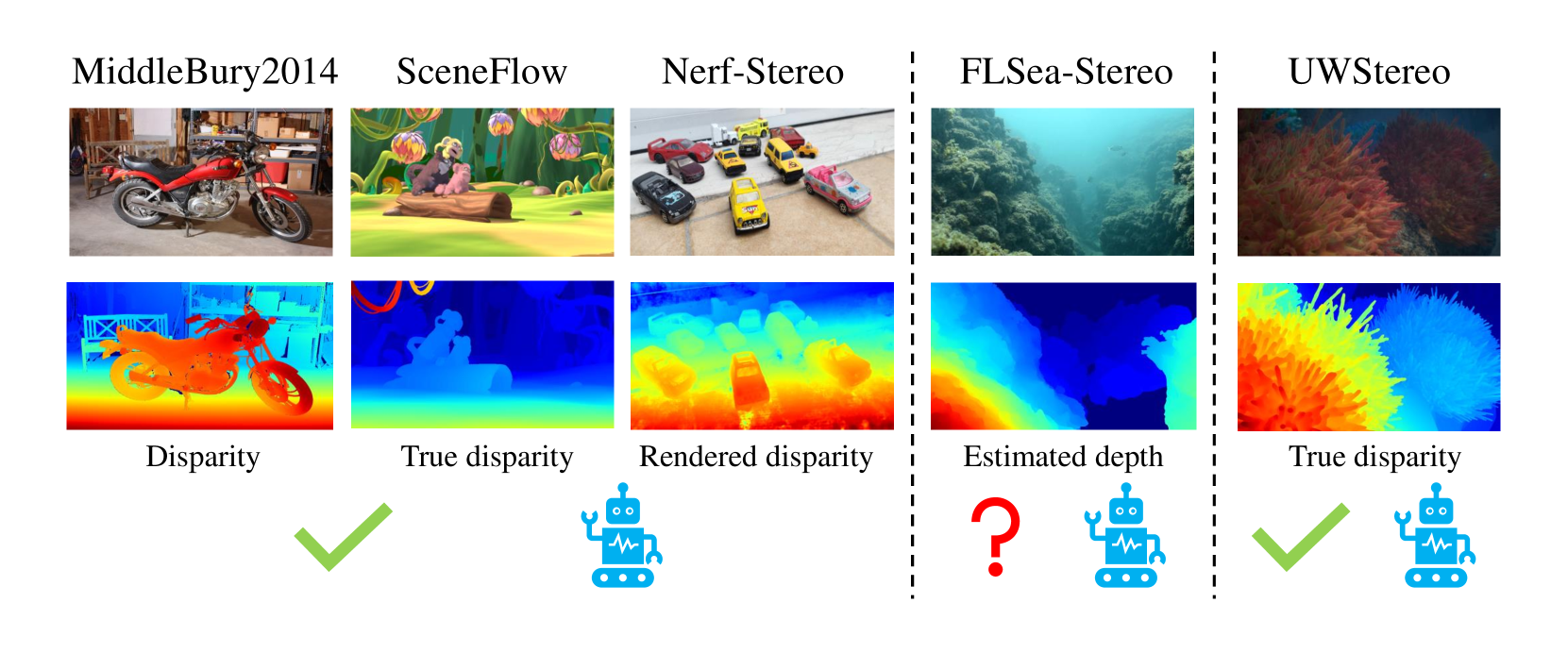
UWStereo: A Large Synthetic Dataset for Underwater Stereo Matching
Qingxuan Lv, Junyu Dong, Yuezun Li, Sheng Chen, Hui Yu, Shu Zhang, Wenhan Wang
Despite recent advances in stereo matching, the extension to intricate underwater settings remains unexplored, primarily owing to: 1) the reduced visibility, low contrast, and other adverse effects of underwater images; 2) the difficulty in obtaining ground truth data for training deep learning models, i.e. simultaneously capturing an image and estimating its corresponding pixel-wise depth information in underwater environments. To enable further advance in underwater stereo matching, we introduce a large synthetic dataset called UWStereo. Our dataset includes 29,568 synthetic stereo image pairs with dense and accurate disparity annotations for left view. We design four distinct underwater scenes filled with diverse objects such as corals, ships and robots. We also induce additional variations in camera model, lighting, and environmental effects. In comparison with existing underwater datasets, UWStereo is superior in terms of scale, variation, annotation, and photo-realistic image quality. To substantiate the efficacy of the UWStereo dataset, we undertake a comprehensive evaluation compared with nine state-of-the-art algorithms as benchmarks. The results indicate that current models still struggle to generalize to new domains. Hence, we design a new strategy that learns to reconstruct cross domain masked images before stereo matching training and integrate a cross view attention enhancement module that aggregates long-range content information to enhance the generalization ability.
Read more9/4/2024
0
DIDLM:A Comprehensive Multi-Sensor Dataset with Infrared Cameras, Depth Cameras, LiDAR, and 4D Millimeter-Wave Radar in Challenging Scenarios for 3D Mapping
WeiSheng Gong, Chen He, KaiJie Su, QingYong Li
This study presents a comprehensive multi-sensor dataset designed for 3D mapping in challenging indoor and outdoor environments. The dataset comprises data from infrared cameras, depth cameras, LiDAR, and 4D millimeter-wave radar, facilitating exploration of advanced perception and mapping techniques. Integration of diverse sensor data enhances perceptual capabilities in extreme conditions such as rain, snow, and uneven road surfaces. The dataset also includes interactive robot data at different speeds indoors and outdoors, providing a realistic background environment. Slam comparisons between similar routes are conducted, analyzing the influence of different complex scenes on various sensors. Various SLAM algorithms are employed to process the dataset, revealing performance differences among algorithms in different scenarios. In summary, this dataset addresses the problem of data scarcity in special environments, fostering the development of perception and mapping algorithms for extreme conditions. Leveraging multi-sensor data including infrared, depth cameras, LiDAR, 4D millimeter-wave radar, and robot interactions, the dataset advances intelligent mapping and perception capabilities.Our dataset is available at https://github.com/GongWeiSheng/DIDLM.
Read more4/16/2024