UWStereo: A Large Synthetic Dataset for Underwater Stereo Matching

0
Sign in to get full access
Overview
- Presents UWStereo, a large-scale synthetic dataset for underwater stereo matching
- Designed to address the lack of diverse and high-quality training data for underwater computer vision tasks
- Includes realistic 3D scenes, accurate camera models, and simulated underwater effects
Plain English Explanation
The paper introduces a new dataset called UWStereo, which is designed to help improve underwater computer vision systems. Underwater environments can be challenging for computer vision algorithms because the water can distort and obscure the visual information. To address this, the researchers created a large synthetic dataset that simulates realistic underwater scenes, including accurate 3D models, camera properties, and visual effects like light scattering and absorption.
The key idea behind UWStereo is to provide a diverse and high-quality training dataset that can help machine learning models learn to better understand and process underwater imagery. By using synthetic data, the researchers were able to generate a much larger and more varied dataset than would be feasible with real-world underwater photography or videography. This allows models trained on UWStereo to develop more robust and generalizable capabilities for tasks like stereo matching, object detection, and scene understanding in underwater settings.
Technical Explanation
The UWStereo dataset was created using photorealistic 3D rendering techniques to generate diverse underwater scenes with accurately simulated camera properties and environmental effects. The dataset includes 10,000 stereo image pairs across 500 unique 3D scenes, with each scene rendered from multiple camera viewpoints to create additional training samples.
The scenes were modeled after real-world underwater environments, including coral reefs, shipwrecks, and marine life. The researchers used physically-based rendering to capture realistic light transport, water turbidity, and other visual phenomena that occur in underwater imaging. They also incorporated accurate camera models, including calibration parameters and lens distortion, to ensure the synthetic data closely matches the characteristics of real underwater cameras.
To validate the realism and utility of the UWStereo dataset, the authors conducted stereo matching experiments using state-of-the-art algorithms. The results showed that models trained on UWStereo data were able to achieve significantly higher accuracy on underwater stereo matching tasks compared to models trained on generic or indoor-focused datasets. This demonstrates the value of the UWStereo dataset in advancing the state-of-the-art for underwater computer vision.
Critical Analysis
The UWStereo dataset represents an important contribution to the field of underwater computer vision, as it addresses a key limitation in the availability of high-quality, diverse training data. By leveraging photorealistic 3D rendering, the researchers were able to create a large-scale dataset with a high degree of visual realism and environmental fidelity.
However, one potential limitation of the synthetic approach is that it may not fully capture the nuances and unpredictability of real-world underwater environments. While the researchers made efforts to simulate realistic underwater effects, there may be subtle differences between the synthetic and real-world data that could impact the generalization of models trained on UWStereo.
Additionally, the dataset is focused specifically on stereo matching tasks, and its applicability to other underwater computer vision problems, such as object detection or semantic segmentation, is not explicitly evaluated in the paper. Further research may be needed to assess the broader utility of the UWStereo dataset for a wider range of underwater vision tasks.
Conclusion
The UWStereo dataset represents a significant advancement in the availability of high-quality training data for underwater computer vision. By leveraging photorealistic 3D rendering, the researchers were able to create a large-scale synthetic dataset that can serve as a valuable resource for developing and evaluating machine learning models for tasks like stereo matching in underwater environments. The demonstrated improvements in stereo matching accuracy suggest that UWStereo has the potential to drive further progress in this important domain of computer vision.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UWStereo: A Large Synthetic Dataset for Underwater Stereo Matching
Qingxuan Lv, Junyu Dong, Yuezun Li, Sheng Chen, Hui Yu, Shu Zhang, Wenhan Wang
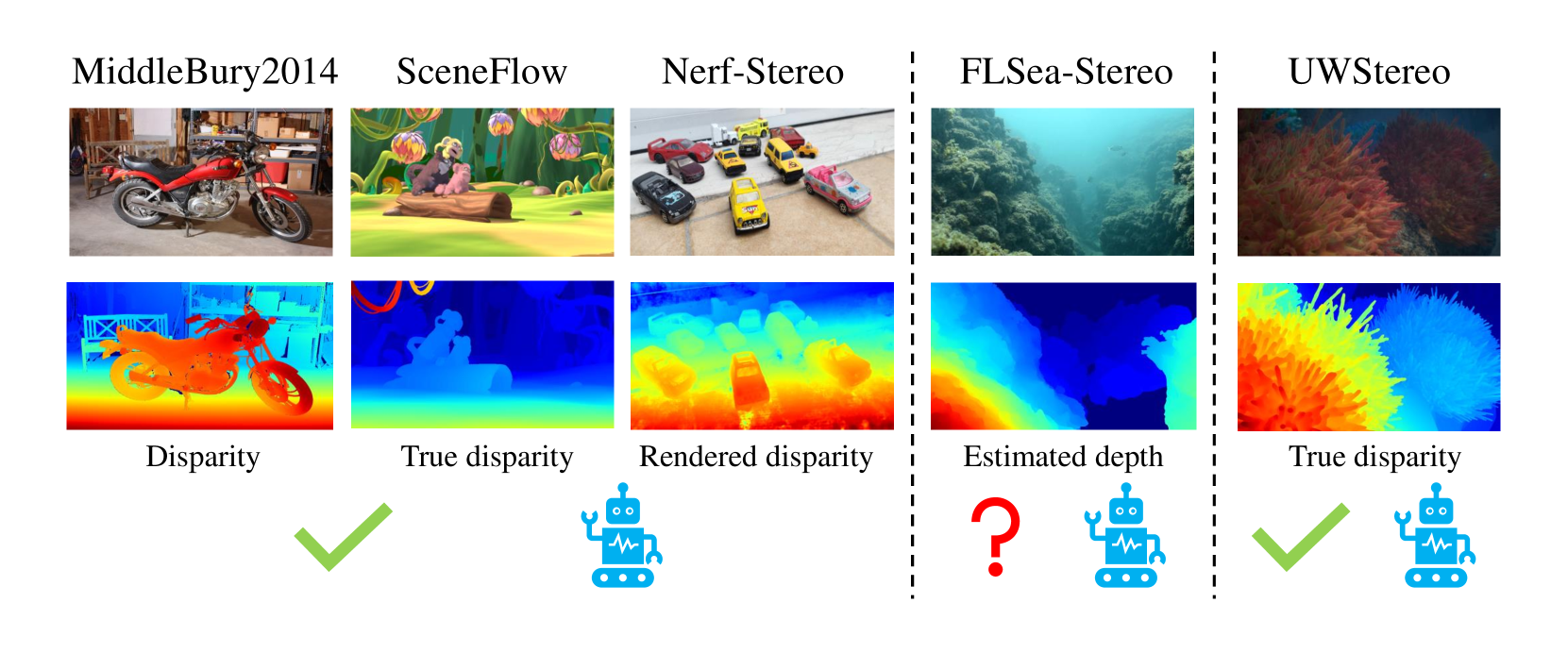
Despite recent advances in stereo matching, the extension to intricate underwater settings remains unexplored, primarily owing to: 1) the reduced visibility, low contrast, and other adverse effects of underwater images; 2) the difficulty in obtaining ground truth data for training deep learning models, i.e. simultaneously capturing an image and estimating its corresponding pixel-wise depth information in underwater environments. To enable further advance in underwater stereo matching, we introduce a large synthetic dataset called UWStereo. Our dataset includes 29,568 synthetic stereo image pairs with dense and accurate disparity annotations for left view. We design four distinct underwater scenes filled with diverse objects such as corals, ships and robots. We also induce additional variations in camera model, lighting, and environmental effects. In comparison with existing underwater datasets, UWStereo is superior in terms of scale, variation, annotation, and photo-realistic image quality. To substantiate the efficacy of the UWStereo dataset, we undertake a comprehensive evaluation compared with nine state-of-the-art algorithms as benchmarks. The results indicate that current models still struggle to generalize to new domains. Hence, we design a new strategy that learns to reconstruct cross domain masked images before stereo matching training and integrate a cross view attention enhancement module that aggregates long-range content information to enhance the generalization ability.
Read more9/4/2024

0
Physics-Inspired Synthesized Underwater Image Dataset
Reina Kaneko, Hiroshi Higashi, Yuichi Tanaka
This paper introduces the physics-inspired synthesized underwater image dataset (PHISWID), a dataset tailored for enhancing underwater image processing through physics-inspired image synthesis. Deep learning approaches to underwater image enhancement typically demand extensive datasets, yet acquiring paired clean and degraded underwater ones poses significant challenges. While several underwater image datasets have been proposed using physics-based synthesis, a publicly accessible collection has been lacking. Additionally, most underwater image synthesis approaches do not intend to reproduce atmospheric scenes, resulting in incomplete enhancement. PHISWID addresses this gap by offering a set of paired ground-truth (atmospheric) and synthetically degraded underwater images, showcasing not only color degradation but also the often-neglected effects of marine snow, a composite of organic matter and sand particles that considerably impairs underwater image clarity. The dataset applies these degradations to atmospheric RGB-D images, enhancing the dataset's realism and applicability. PHISWID is particularly valuable for training deep neural networks in a supervised learning setting and for objectively assessing image quality in benchmark analyses. Our results reveal that even a basic U-Net architecture, when trained with PHISWID, substantially outperforms existing methods in underwater image enhancement. We intend to release PHISWID publicly, contributing a significant resource to the advancement of underwater imaging technology.
Read more4/8/2024
🖼️
0
UWFormer: Underwater Image Enhancement via a Semi-Supervised Multi-Scale Transformer
Weiwen Chen, Yingtie Lei, Shenghong Luo, Ziyang Zhou, Mingxian Li, Chi-Man Pun
Underwater images often exhibit poor quality, distorted color balance and low contrast due to the complex and intricate interplay of light, water, and objects. Despite the significant contributions of previous underwater enhancement techniques, there exist several problems that demand further improvement: (i) The current deep learning methods rely on Convolutional Neural Networks (CNNs) that lack the multi-scale enhancement, and global perception field is also limited. (ii) The scarcity of paired real-world underwater datasets poses a significant challenge, and the utilization of synthetic image pairs could lead to overfitting. To address the aforementioned problems, this paper introduces a Multi-scale Transformer-based Network called UWFormer for enhancing images at multiple frequencies via semi-supervised learning, in which we propose a Nonlinear Frequency-aware Attention mechanism and a Multi-Scale Fusion Feed-forward Network for low-frequency enhancement. Besides, we introduce a special underwater semi-supervised training strategy, where we propose a Subaqueous Perceptual Loss function to generate reliable pseudo labels. Experiments using full-reference and non-reference underwater benchmarks demonstrate that our method outperforms state-of-the-art methods in terms of both quantity and visual quality.
Read more4/9/2024

0
FIReStereo: Forest InfraRed Stereo Dataset for UAS Depth Perception in Visually Degraded Environments
Devansh Dhrafani, Yifei Liu, Andrew Jong, Ukcheol Shin, Yao He, Tyler Harp, Yaoyu Hu, Jean Oh, Sebastian Scherer
Robust depth perception in visually-degraded environments is crucial for autonomous aerial systems. Thermal imaging cameras, which capture infrared radiation, are robust to visual degradation. However, due to lack of a large-scale dataset, the use of thermal cameras for unmanned aerial system (UAS) depth perception has remained largely unexplored. This paper presents a stereo thermal depth perception dataset for autonomous aerial perception applications. The dataset consists of stereo thermal images, LiDAR, IMU and ground truth depth maps captured in urban and forest settings under diverse conditions like day, night, rain, and smoke. We benchmark representative stereo depth estimation algorithms, offering insights into their performance in degraded conditions. Models trained on our dataset generalize well to unseen smoky conditions, highlighting the robustness of stereo thermal imaging for depth perception. We aim for this work to enhance robotic perception in disaster scenarios, allowing for exploration and operations in previously unreachable areas. The dataset and source code are available at https://firestereo.github.io.
Read more9/14/2024