First path component power based NLOS mitigation in UWB positioning system
2403.19706
0
0
🔮
Abstract
The paper describes an NLOS (Non-Line-of-Sight) mitigation method intended for use in a UWB positioning system. In the proposed method propagation conditions between the localized objects and the anchors forming system infrastructure are classified into one of three categories: LOS (Line-of-Sight), NLOS and severe NLOS. Non-Line-of-Sight detection is conducted based on first path signal component power measurements. For each of the categories, average NLOS inducted time of arrival bias and bias standard deviation have been estimated based on results gathered during a measurement campaign conducted in a fully furnished apartment. To locate a tag, an EKF (Extended Kalman Filter) based algorithm is used. The proposed method of NLOS mitigation consists in correcting measurement results obtained in NLOS conditions and lowering their significance in a tag position estimation process. The paper includes the description of the method and the results of the conducted experiments.
Create account to get full access
Overview
- The paper describes a method to improve the accuracy of UWB (Ultra-Wideband) positioning systems in situations where the direct line-of-sight between the object being located and the system's anchor points is obstructed.
- The proposed approach categorizes the propagation conditions between the object and anchors into three types: Line-of-Sight (LOS), Non-Line-of-Sight (NLOS), and severe NLOS.
- The method uses measurements of the first signal path component power to detect NLOS conditions and then corrects the resulting timing biases to improve the object's position estimate.
- An Extended Kalman Filter algorithm is used to combine the corrected measurements and estimate the object's location.
Plain English Explanation
Positioning systems that use UWB technology can accurately locate objects, but they run into problems when the direct path between the object and the system's fixed reference points (called anchors) is blocked. This can happen in buildings or other environments with lots of obstacles.
The new method described in the paper tries to address this "non-line-of-sight" problem. It first classifies the signal conditions into three categories: clear line-of-sight, non-line-of-sight, and severe non-line-of-sight. It does this by looking at the power of the first signal that arrives at the anchors.
Based on measurements taken in a fully furnished apartment, the method estimates the typical timing errors caused by non-line-of-sight conditions. It then uses an advanced algorithm called an Extended Kalman Filter to correct these timing errors and combine the corrected measurements to calculate a more accurate position for the object.
The key idea is to identify when non-line-of-sight is occurring and then compensate for its effects, rather than just treating all non-line-of-sight situations the same way. This allows the system to maintain high positioning accuracy even when the direct path between the object and anchors is blocked.
Technical Explanation
The paper describes a Non-Line-of-Sight (NLOS) mitigation method for use in a UWB (Ultra-Wideband) positioning system. The method classifies the propagation conditions between the localized object and the system's anchor points into three categories: LOS (Line-of-Sight), NLOS, and severe NLOS.
NLOS detection is performed by analyzing the power of the first signal path component received at the anchors. Based on measurement data collected in a furnished apartment, the paper estimates the average NLOS-induced time-of-arrival bias and bias standard deviation for each propagation condition category.
To locate the object, the system uses an Extended Kalman Filter (EKF) algorithm. The NLOS mitigation method involves correcting the measurement results obtained under NLOS conditions and reducing their influence in the position estimation process.
The paper includes a detailed description of the proposed NLOS mitigation approach and the results of experiments conducted to evaluate its performance.
Critical Analysis
The paper provides a well-designed NLOS mitigation solution for UWB positioning systems that shows promising results in a real-world indoor environment. The authors have thoughtfully addressed a common challenge faced by these systems, which is the degradation of accuracy when the line-of-sight between the object and anchors is obstructed.
One potential limitation of the research is the relatively small scale of the measurement campaign, which was conducted in a single furnished apartment. Further validation in larger and more diverse indoor environments would help strengthen the generalizability of the proposed method.
Additionally, the paper does not provide a detailed comparison of the NLOS mitigation method's performance against other approaches in the literature. Benchmarking the solution against state-of-the-art techniques would help contextualize the contributions and identify any areas for further improvement.
Overall, the research represents a valuable contribution to enhancing the reliability and accuracy of UWB positioning systems in challenging NLOS scenarios. The insights and techniques described in the paper could have important implications for the deployment of these systems in real-world applications, such as indoor navigation, asset tracking, and smart building management.
Conclusion
The paper presents an effective NLOS mitigation method for UWB positioning systems that can maintain high localization accuracy even when the direct line-of-sight between the object and anchors is obstructed. By classifying the propagation conditions and applying targeted corrections to NLOS measurements, the proposed approach demonstrates the ability to overcome a significant challenge faced by these positioning systems.
The research findings could have significant practical implications, as UWB technology continues to gain traction in a variety of indoor applications that require reliable and precise object localization. The NLOS mitigation techniques described in the paper represent an important step towards realizing the full potential of UWB positioning systems in complex real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
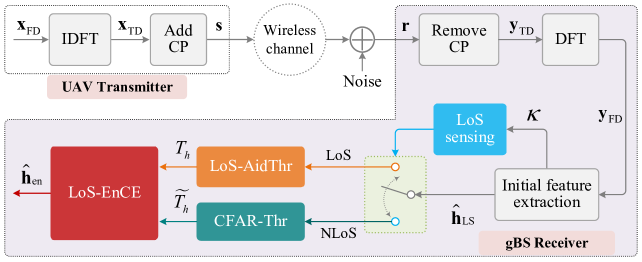
LoS Sensing-based Channel Estimation in UAV-Assisted OFDM Systems
Chaojin Qing, Zhiying Liu, Wenquan Hu, Yinjie Zhang, Xi Cai, Pengfei Du
0
0
In unmanned aerial vehicle (UAV)-assisted orthogonal frequency division multiplexing (OFDM) systems, the potential advantage of the line-of-sight (LoS) path, characterized by its high probability of existence, has not been fully harnessed, thereby impeding the improvement of channel estimation (CE) accuracy. Inspired by the ideas of integrated sensing and communication (ISAC), this letter develops a LoS sensing method aimed at detecting the presence of LoS path. Leveraging the prior information obtained from LoS path detection, the detection thresholds for resolvable paths are proposed for LoS and Non-LoS (NLoS) scenarios, respectively. By employing these specifically designed detection thresholds, denoising processing is applied to classical least square (LS) CE, thereby improving the CE accuracy. Simulation results validate the effectiveness of the proposed method in enhancing CE accuracy and demonstrate its robustness against parameter variations.
4/4/2024
❗
Utilizing acceleration measurements to improve TDOA based localization
Marcin Kolakowski
0
0
In this paper localization using UWB positioning system and an inertial unit containing a single accelerometer is considered. The main part of the paper describes a novel algorithm for person localization. The algorithm is based on modified Extended Kalman Filter and utilizes TDOA (Time Difference of Arrival) results obtained from UWB system and results of acceleration measurement performed by the localized tag device. The proposed algorithm has been experimentally investigated through simulation and experiments. The results are included in the paper.
4/1/2024
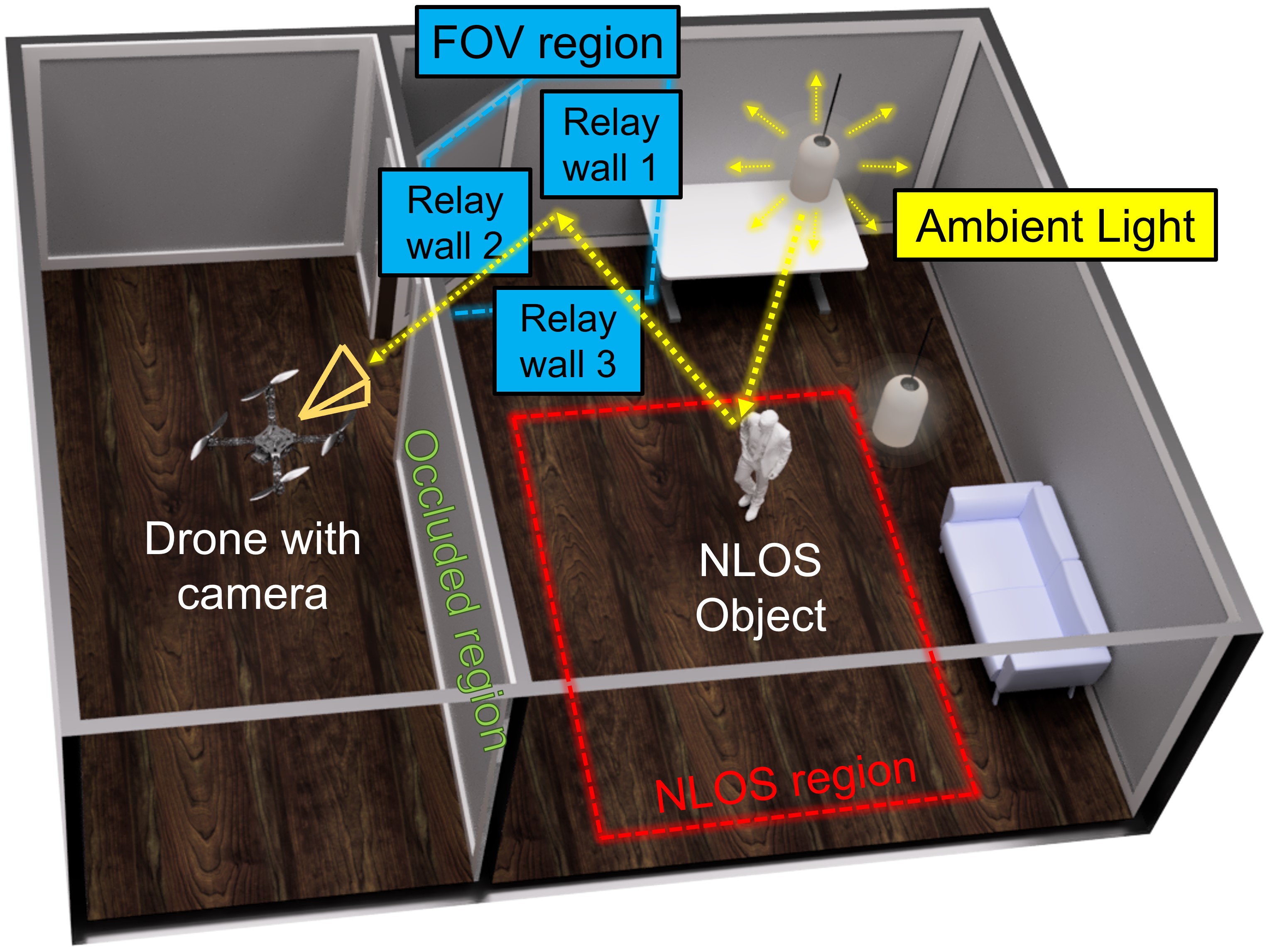
PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Tracking with a Mobile Robot
Shenbagaraj Kannapiran, Sreenithy Chandran, Suren Jayasuriya, Spring Berman
0
0
The study of non-line-of-sight (NLOS) imaging is growing due to its many potential applications, including rescue operations and pedestrian detection by self-driving cars. However, implementing NLOS imaging on a moving camera remains an open area of research. Existing NLOS imaging methods rely on time-resolved detectors and laser configurations that require precise optical alignment, making it difficult to deploy them in dynamic environments. This work proposes a data-driven approach to NLOS imaging, PathFinder, that can be used with a standard RGB camera mounted on a small, power-constrained mobile robot, such as an aerial drone. Our experimental pipeline is designed to accurately estimate the 2D trajectory of a person who moves in a Manhattan-world environment while remaining hidden from the camera's field-of-view. We introduce a novel approach to process a sequence of dynamic successive frames in a line-of-sight (LOS) video using an attention-based neural network that performs inference in real-time. The method also includes a preprocessing selection metric that analyzes images from a moving camera which contain multiple vertical planar surfaces, such as walls and building facades, and extracts planes that return maximum NLOS information. We validate the approach on in-the-wild scenes using a drone for video capture, thus demonstrating low-cost NLOS imaging in dynamic capture environments.
4/9/2024

An Initial Study of Human-Scale Blockage in sub-THz Radio Propagation with Application to Indoor Passive Localization
F. Paonessa, G. Virone, S. Kianoush, A. Nordio, S. Savazzi
0
0
This paper empirically investigates the body induced electromagnetic (EM) effects, namely the human body blockage, by conducting indoor measurement campaigns in the unexplored sub-THz W-band (75-110 GHz) and G-band (170-260 GHz). The proposed analysis focuses on both the alterations of channel frequency response induced by body presence, fully or partially obstructing the line-of-sight (LoS) between transmitter and recevier, as well as on the channel impulse response (CIR) for selected movements of the target, i.e. crossing the LoS of the radio link. Modelling of large scale parameters is also presented using a phantom body object. The proposed study has applications in device-free radio localization and radio frequency (RF) sensing scenarios where the EM radiation or environmental radio signals are collected and processed to detect and locate people without requiring them to wear any electronic devices. Although preliminary, the study reveals that discrimination of the blockage micro-movements is possible, achieving higher precision compared to classical RF sensing and localization using cm-scale wavelengths (2.4-6GHz bands).
6/26/2024