PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Tracking with a Mobile Robot
2404.05024
0
0
Abstract
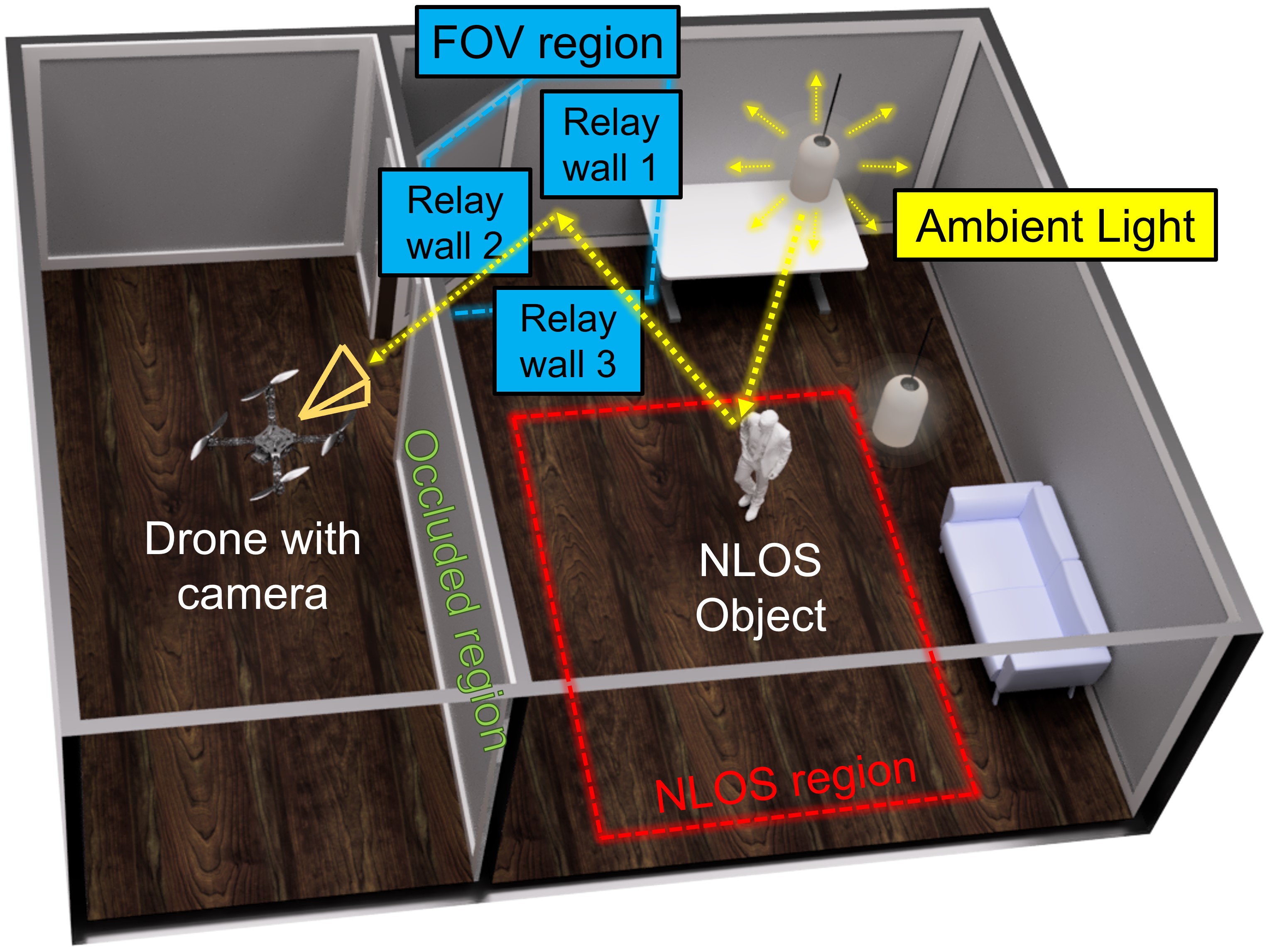
The study of non-line-of-sight (NLOS) imaging is growing due to its many potential applications, including rescue operations and pedestrian detection by self-driving cars. However, implementing NLOS imaging on a moving camera remains an open area of research. Existing NLOS imaging methods rely on time-resolved detectors and laser configurations that require precise optical alignment, making it difficult to deploy them in dynamic environments. This work proposes a data-driven approach to NLOS imaging, PathFinder, that can be used with a standard RGB camera mounted on a small, power-constrained mobile robot, such as an aerial drone. Our experimental pipeline is designed to accurately estimate the 2D trajectory of a person who moves in a Manhattan-world environment while remaining hidden from the camera's field-of-view. We introduce a novel approach to process a sequence of dynamic successive frames in a line-of-sight (LOS) video using an attention-based neural network that performs inference in real-time. The method also includes a preprocessing selection metric that analyzes images from a moving camera which contain multiple vertical planar surfaces, such as walls and building facades, and extracts planes that return maximum NLOS information. We validate the approach on in-the-wild scenes using a drone for video capture, thus demonstrating low-cost NLOS imaging in dynamic capture environments.
Create account to get full access
Overview
- This paper proposes a system called "PathFinder" that enables a mobile robot to track dynamic non-line-of-sight (NLOS) targets using attention-driven techniques.
- The system uses a combination of sensors, including cameras and radar, to detect and track targets that are not directly visible to the robot.
- The key innovation is the use of attention-driven techniques to focus the robot's sensors on the most relevant areas, improving tracking performance and efficiency.
Plain English Explanation
The paper describes a system called "PathFinder" that allows a mobile robot to track moving objects that it can't directly see. This could be useful in situations where there are obstacles or walls blocking the robot's line of sight to the target.
The robot uses a combination of cameras and radar to try to detect and follow the target. The key innovation is the way the robot decides where to focus its attention. Rather than just scanning in all directions, the robot uses "attention-driven" techniques to concentrate on the areas that are most likely to contain the target. This helps the robot track the target more effectively and efficiently, without wasting time and resources searching in irrelevant areas.
The Adaptive Line-of-Sight Guidance Law Based Vector and Under-Canopy Navigation Using Aerial LiDAR Maps papers explore related techniques for dealing with obstructed lines of sight, which could provide useful context for understanding the "PathFinder" system.
Technical Explanation
The "PathFinder" system uses a combination of cameras and radar sensors to detect and track dynamic NLOS targets. The key innovation is the use of attention-driven techniques to focus the sensors on the most relevant areas.
The system first uses the camera and radar data to build a 3D map of the environment, including the locations of any obstacles that could be blocking the line of sight to the target. It then applies deep learning models to analyze this map and identify the most likely locations of the target, based on factors like previous target movements and the structure of the environment.
These attention-driven techniques allow the robot to concentrate its sensors on the areas that are most likely to contain the target, rather than wasting time and resources scanning in all directions. This improves the robot's tracking performance and efficiency.
The paper also describes experiments where the "PathFinder" system was tested on a mobile robot platform, demonstrating its ability to effectively track dynamic NLOS targets in real-world scenarios. The LOS Sensing Based Channel Estimation for UAV-Assisted and First Path Component Power Based NLOS Mitigation papers discuss related techniques for dealing with non-line-of-sight sensing challenges.
Critical Analysis
The paper presents a novel and promising approach to NLOS target tracking using a mobile robot. The attention-driven techniques seem well-designed to improve the system's efficiency and effectiveness, and the experimental results appear to demonstrate the viability of the approach.
However, the paper does not address some potential limitations or areas for further research. For example, it's not clear how the system would perform in more complex or dynamic environments, or how it would handle situations where the target's movements are less predictable.
Additionally, the paper does not provide much detail on the specific deep learning models or algorithms used for the attention-driven techniques. More information on these components and their performance characteristics would be useful for evaluating the technical merits of the approach.
The Non-Linear Model Predictive Control for Multi-Task paper explores some related challenges in the context of multi-task control, which could be relevant for further developing the "PathFinder" system.
Conclusion
The "PathFinder" system presented in this paper represents an innovative approach to NLOS target tracking using a mobile robot. By leveraging attention-driven techniques to focus the robot's sensors on the most relevant areas, the system can effectively track dynamic targets even when they are not directly visible.
The experimental results demonstrate the viability of this approach, and the paper's contributions could have valuable implications for a wide range of applications, from search and rescue operations to autonomous surveillance and monitoring.
While the paper leaves some room for further exploration and refinement, the core ideas and techniques presented here suggest that "PathFinder" could be an important step forward in the field of NLOS tracking and sensing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📉
Ptychographic non-line-of-sight imaging for depth-resolved visualization of hidden objects
Pengming Song, Qianhao Zhao, Ruihai Wang, Ninghe Liu, Yingqi Qiang, Tianbo Wang, Xincheng Zhang, Yi Zhang, Liangcai Cao, Guoan Zheng
0
0
Non-line-of-sight (NLOS) imaging enables the visualization of objects hidden from direct view, with applications in surveillance, remote sensing, and light detection and ranging. Here, we introduce a NLOS imaging technique termed ptychographic NLOS (pNLOS), which leverages coded ptychography for depth-resolved imaging of obscured objects. Our approach involves scanning a laser spot on a wall to illuminate the hidden objects in an obscured region. The reflected wavefields from these objects then travel back to the wall, get modulated by the wall's complex-valued profile, and the resulting diffraction patterns are captured by a camera. By modulating the object wavefields, the wall surface serves the role of the coded layer as in coded ptychography. As we scan the laser spot to different positions, the reflected object wavefields on the wall translate accordingly, with the shifts varying for objects at different depths. This translational diversity enables the acquisition of a set of modulated diffraction patterns referred to as a ptychogram. By processing the ptychogram, we recover both the objects at different depths and the modulation profile of the wall surface. Experimental results demonstrate high-resolution, high-fidelity imaging of hidden objects, showcasing the potential of pNLOS for depth-aware vision beyond the direct line of sight.
5/21/2024
Vision-based Discovery of Nonlinear Dynamics for 3D Moving Target
Zitong Zhang, Yang Liu, Hao Sun
0
0
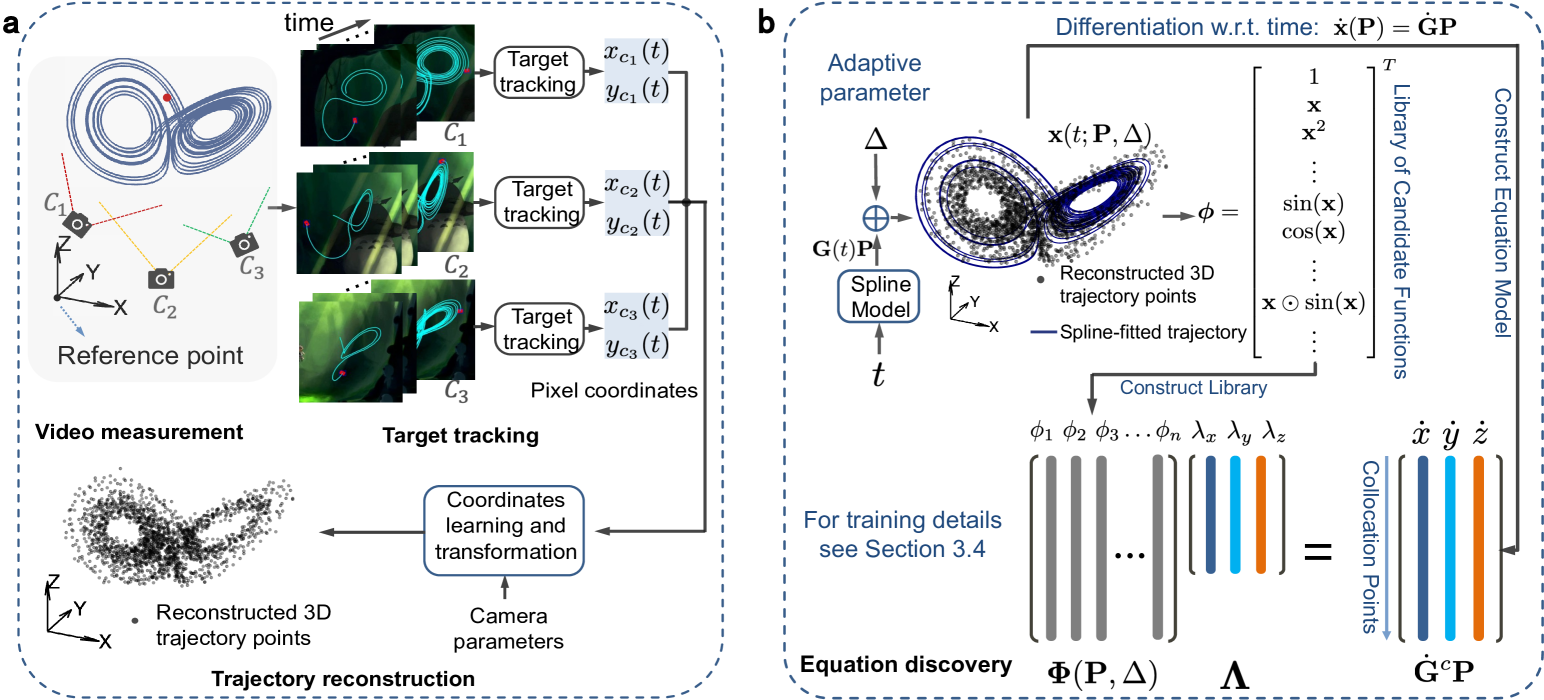
Data-driven discovery of governing equations has kindled significant interests in many science and engineering areas. Existing studies primarily focus on uncovering equations that govern nonlinear dynamics based on direct measurement of the system states (e.g., trajectories). Limited efforts have been placed on distilling governing laws of dynamics directly from videos for moving targets in a 3D space. To this end, we propose a vision-based approach to automatically uncover governing equations of nonlinear dynamics for 3D moving targets via raw videos recorded by a set of cameras. The approach is composed of three key blocks: (1) a target tracking module that extracts plane pixel motions of the moving target in each video, (2) a Rodrigues' rotation formula-based coordinate transformation learning module that reconstructs the 3D coordinates with respect to a predefined reference point, and (3) a spline-enhanced library-based sparse regressor that uncovers the underlying governing law of dynamics. This framework is capable of effectively handling the challenges associated with measurement data, e.g., noise in the video, imprecise tracking of the target that causes data missing, etc. The efficacy of our method has been demonstrated through multiple sets of synthetic videos considering different nonlinear dynamics.
4/30/2024

Adaptive Line-Of-Sight guidance law based on vector fields path following for underactuated unmanned surface vehicle
Jie Qi, Ronghua Wanga, Nailong Wu
0
0
The focus of this paper is to develop a methodology that enables an unmanned surface vehicle (USV) to efficiently track a planned path. The introduction of a vector field-based adaptive line of-sight guidance law (VFALOS) for accurate trajectory tracking and minimizing the overshoot response time during USV tracking of curved paths improves the overall line-of-sight (LOS) guidance method. These improvements contribute to faster convergence to the desired path, reduce oscillations, and can mitigate the effects of persistent external disturbances. It is shown that the proposed guidance law exhibits k-exponential stability when converging to the desired path consisting of straight and curved lines. The results in the paper show that the proposed method effectively improves the accuracy of the USV tracking the desired path while ensuring the safety of the USV work.
4/8/2024

Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
0
0
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
6/19/2024