Utilizing acceleration measurements to improve TDOA based localization
2403.19865
0
0
❗
Abstract
In this paper localization using UWB positioning system and an inertial unit containing a single accelerometer is considered. The main part of the paper describes a novel algorithm for person localization. The algorithm is based on modified Extended Kalman Filter and utilizes TDOA (Time Difference of Arrival) results obtained from UWB system and results of acceleration measurement performed by the localized tag device. The proposed algorithm has been experimentally investigated through simulation and experiments. The results are included in the paper.
Create account to get full access
Overview
- Researchers investigate a novel localization algorithm that uses Ultra-Wide Band (UWB) positioning and a single accelerometer sensor.
- The algorithm is based on a modified Extended Kalman Filter, which combines UWB time-difference-of-arrival data and acceleration measurements.
- The researchers conduct simulations and experiments to evaluate the performance of their proposed algorithm.
Plain English Explanation
Finding the exact location of a person or object is an important task in many applications, such as indoor navigation, emergency response, and asset tracking. Traditional methods can be limited, so researchers are exploring new approaches.
In this work, the researchers developed a new way to determine a person's location using two key technologies: Ultra-Wide Band (UWB) and an accelerometer. UWB is a wireless communication system that can accurately measure the time it takes for a signal to travel between devices. This time difference can be used to calculate the distance between them. Meanwhile, an accelerometer is a sensor that measures acceleration, which can provide information about how a person is moving.
The researchers combined data from the UWB system and the accelerometer into a single localization algorithm. This algorithm uses a mathematical technique called the Extended Kalman Filter to continuously update the person's estimated position as new measurements come in. The researchers tested this approach through computer simulations and real-world experiments to see how well it could track a person's location.
Technical Explanation
The core of the researchers' approach is a modified Extended Kalman Filter (EKF) algorithm that fuses data from a UWB positioning system and a single accelerometer sensor on the tracked device.
The UWB system provides time-difference-of-arrival (TDOA) measurements, which are used to estimate the distance between the tracked device and multiple fixed UWB base stations. These distance measurements are incorporated into the EKF algorithm to update the position estimate.
Additionally, the accelerometer data is used to estimate the device's velocity and acceleration, which are also fed into the EKF. This combined use of spatial (UWB) and kinematic (accelerometer) information helps the algorithm better track the person's movements.
The researchers made several modifications to the standard EKF formulation to improve its performance for this localization application. This includes customized state transition and measurement models, as well as techniques to handle outliers in the UWB TDOA data.
Through simulation studies and real-world experiments, the researchers demonstrate that their combined UWB and accelerometer approach can achieve accurate indoor localization performance, outperforming solutions that use only UWB or only inertial sensing.
Critical Analysis
The researchers present a thorough evaluation of their proposed localization algorithm, including both simulation and experimental results. The findings suggest this hybrid approach leveraging UWB and accelerometer data can be effective for indoor person tracking applications.
However, the paper does not extensively discuss potential limitations or areas for further improvement. For example, the impact of environmental factors like multipath interference on the UWB ranging accuracy is not explored in depth. Additionally, the scalability of the approach to larger environments or multiple tracked targets is not addressed.
Further research could investigate strategies to enhance robustness to UWB outliers, integrate additional sensor modalities (e.g. magnetometers), and evaluate performance in more complex, real-world indoor settings. Exploring computational efficiency and implementation considerations for resource-constrained devices would also be valuable.
Overall, the researchers have developed a promising technique for indoor localization, but there remain opportunities to build upon this work and further advance the state of the art.
Conclusion
This research presents a novel algorithm that combines UWB positioning and inertial sensing to achieve accurate indoor localization of a person's position and movement. By fusing the complementary spatial and kinematic data from these two sensor modalities, the researchers demonstrate improved tracking performance compared to using either technology alone.
The findings have meaningful implications for a variety of applications where knowing a person's precise location is important, such as assistive technologies, emergency response, and asset management. With further refinements and real-world deployments, this hybrid UWB-inertial approach could become a valuable tool for enabling smart and connected indoor environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
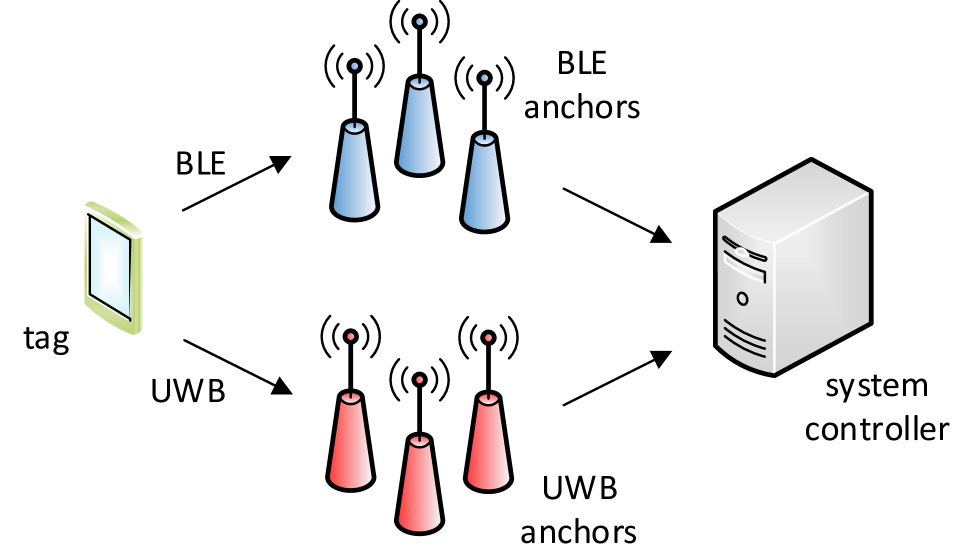
Kalman filter based localization in hybrid BLE-UWB positioning system
Marcin Kolakowski
0
0
In this paper a concept of hybrid Bluetooth Low Energy (BLE) Ultra-wideband (UWB) positioning system is presented. The system is intended to be energy efficient. Low energy BLE unit is used as a primary source of measurement data and for most of the time localization is calculated based on received signal strength (RSS). UWB technology is used less often. Time difference of arrival (TDOA) values measured with UWB radios are periodically used to improve RSS based localization. The paper contains a description of proposed hybrid positioning algorithm. Results of simulations and experiments confirming algorithm's efficiency are also included.
4/4/2024
Adaptive Anchor Pairs Selection in a TDOA-based System Through Robot Localization Error Minimization
Marcin Kolakowski
0
0
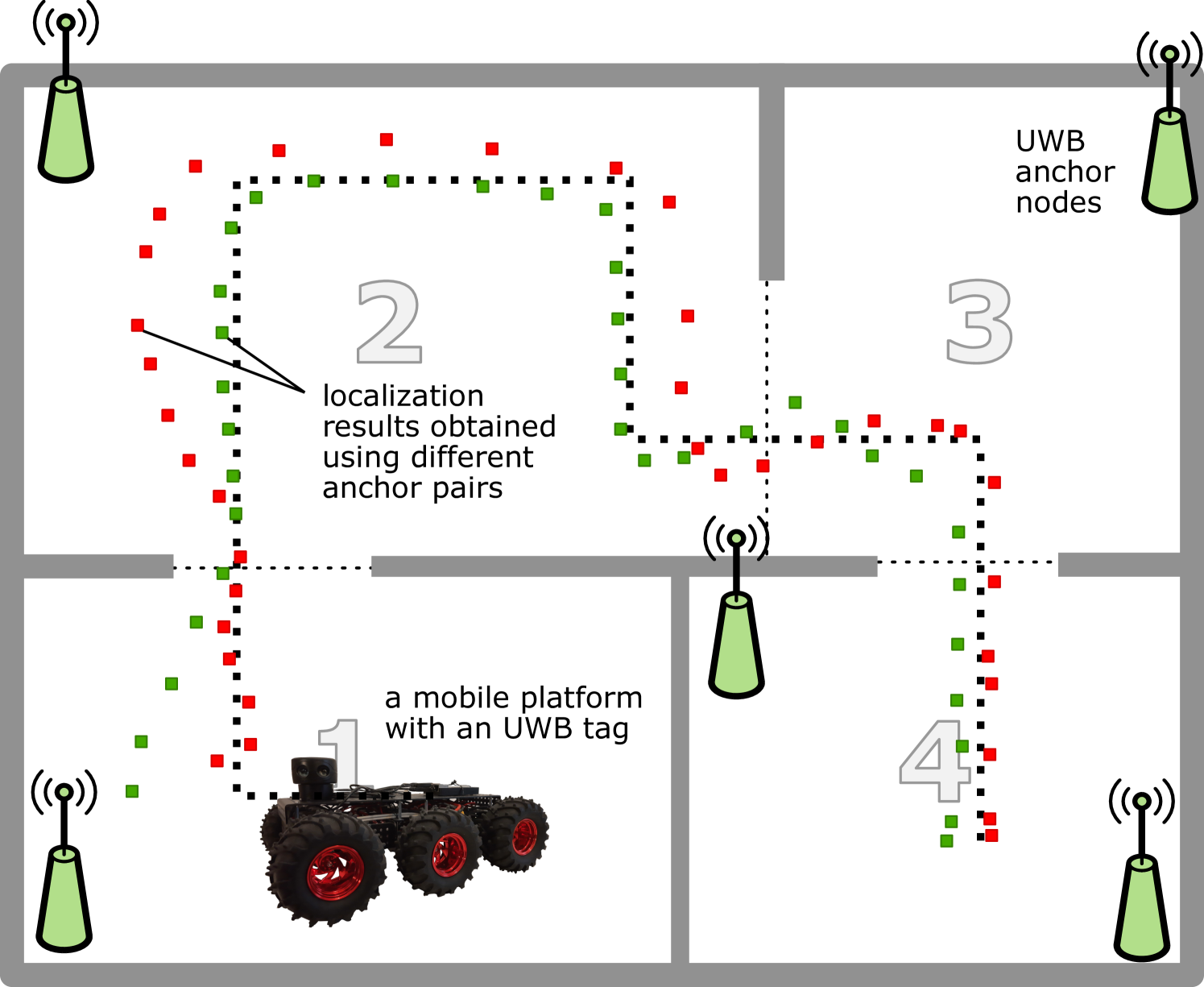
The following paper presents an adaptive anchor pairs selection method for ultra-wideband (UWB) Time Difference of Arrival (TDOA) based positioning systems. The method divides the area covered by the system into several zones and assigns them anchor pair sets. The pair sets are determined during calibration based on localization root mean square error (RMSE). The calibration assumes driving a mobile platform equipped with a LiDAR sensor and a UWB tag through the specified zones. The robot is localized separately based on a large set of different TDOA pairs and using a LiDAR, which acts as the reference. For each zone, the TDOA pairs set for which the registered RMSE is lowest is selected and used for localization in the routine system work. The proposed method has been tested with simulations and experiments. The results for both simulated static and experimental dynamic scenarios have proven that the adaptive selection of the anchor nodes leads to an increase in localization accuracy. In the experiment, the median trajectory error for a moving person localization was at a level of 25 cm.
4/9/2024
Ultra Inertial Poser: Scalable Motion Capture and Tracking from Sparse Inertial Sensors and Ultra-Wideband Ranging
Rayan Armani, Changlin Qian, Jiaxi Jiang, Christian Holz
0
0
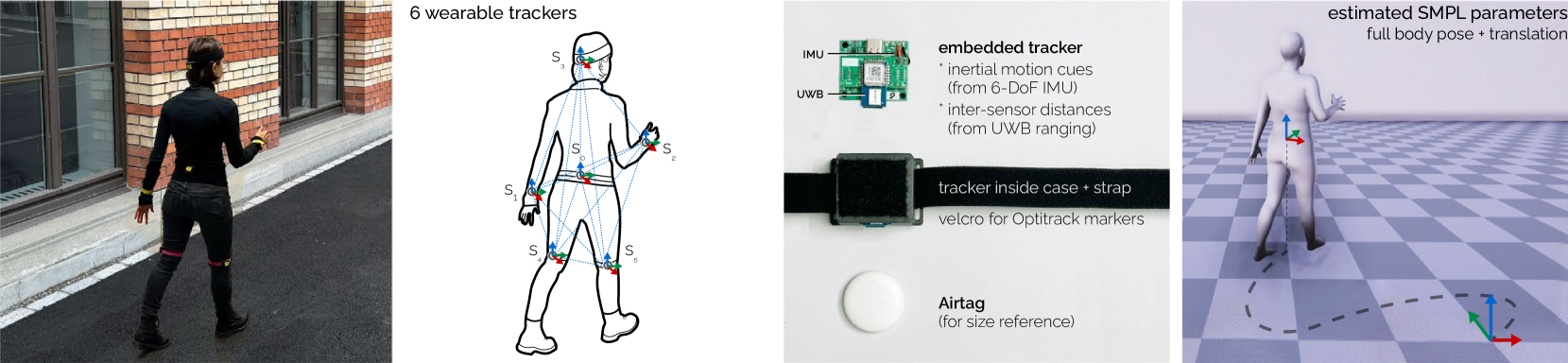
While camera-based capture systems remain the gold standard for recording human motion, learning-based tracking systems based on sparse wearable sensors are gaining popularity. Most commonly, they use inertial sensors, whose propensity for drift and jitter have so far limited tracking accuracy. In this paper, we propose Ultra Inertial Poser, a novel 3D full body pose estimation method that constrains drift and jitter in inertial tracking via inter-sensor distances. We estimate these distances across sparse sensor setups using a lightweight embedded tracker that augments inexpensive off-the-shelf 6D inertial measurement units with ultra-wideband radio-based ranging$-$dynamically and without the need for stationary reference anchors. Our method then fuses these inter-sensor distances with the 3D states estimated from each sensor Our graph-based machine learning model processes the 3D states and distances to estimate a person's 3D full body pose and translation. To train our model, we synthesize inertial measurements and distance estimates from the motion capture database AMASS. For evaluation, we contribute a novel motion dataset of 10 participants who performed 25 motion types, captured by 6 wearable IMU+UWB trackers and an optical motion capture system, totaling 200 minutes of synchronized sensor data (UIP-DB). Our extensive experiments show state-of-the-art performance for our method over PIP and TIP, reducing position error from $13.62$ to $10.65cm$ ($22%$ better) and lowering jitter from $1.56$ to $0.055km/s^3$ (a reduction of $97%$).
5/1/2024
📊
Fast Estimation of Relative Transformation Based on Fusion of Odometry and UWB Ranging Data
Yuan Fu, Zheng Zhang, Guangyang Zeng, Chun Liu, Junfeng Wu, Xiaoqiang Ren
0
0
In this paper, we investigate the problem of estimating the 4-DOF (three-dimensional position and orientation) robot-robot relative frame transformation using odometers and distance measurements between robots. Firstly, we apply a two-step estimation method based on maximum likelihood estimation. Specifically, a good initial value is obtained through unconstrained least squares and projection, followed by a more accurate estimate achieved through one-step Gauss-Newton iteration. Additionally, the optimal installation positions of Ultra-Wideband (UWB) are provided, and the minimum operating time under different quantities of UWB devices is determined. Simulation demonstrates that the two-step approach offers faster computation with guaranteed accuracy while effectively addressing the relative transformation estimation problem within limited space constraints. Furthermore, this method can be applied to real-time relative transformation estimation when a specific number of UWB devices are installed.
5/22/2024