Flexible 3D Lane Detection by Hierarchical Shape MatchingFlexible 3D Lane Detection by Hierarchical Shape Matching

0

Sign in to get full access
Overview
- This paper presents a flexible 3D lane detection approach using hierarchical shape matching.
- The proposed method can handle various lane shapes and types, including curved, straight, and discontinuous lanes.
- The approach consists of several key steps: lane proposal generation, lane shape matching, and lane refinement.
Plain English Explanation
The paper describes a new way to detect 3D lane detection on roads, which is an important task for autonomous vehicles. The key innovation is the use of hierarchical shape matching, which allows the system to handle a wide variety of lane shapes and types, including curved, straight, and even lanes with gaps or interruptions.
The process works as follows:
- Lane Proposal Generation: The system first generates a set of potential lane locations or "proposals" based on visual cues in the camera images.
- Lane Shape Matching: Next, the system compares these proposals against a database of known lane shapes using a hierarchical matching approach. This allows it to identify the best fitting lane shape for each proposal.
- Lane Refinement: Finally, the system refines the detected lane shapes to improve their accuracy and consistency across the scene.
This flexible approach is an improvement over previous lane detection methods, which often struggled with irregular or discontinuous lane markings. By being able to handle a wider range of real-world conditions, the system can provide more robust and reliable lane detection for autonomous driving applications.
Technical Explanation
The core of the Flexible 3D Lane Detection by Hierarchical Shape Matching approach is the use of hierarchical shape matching to identify lane boundaries in 3D space from camera images.
The system first generates lane proposals by analyzing the visual cues in the input images, such as intensity, texture, and geometry. These proposals represent potential lane locations that the system will evaluate further.
Next, the system performs hierarchical shape matching to classify each lane proposal. It does this by comparing the proposal against a database of known lane shapes, organized in a hierarchical manner. The hierarchy allows the system to efficiently match the proposals against increasingly specific lane shape templates, from simple straight lines to more complex curved shapes.
By using this hierarchical approach, the system can handle a wide variety of lane types, including curved, straight, and even discontinuous lanes. The hierarchical shape matching process also provides robustness to partial occlusions and other real-world challenges.
Finally, the system refines the detected lane shapes by enforcing geometric and temporal constraints to improve the accuracy and consistency of the results. This helps to produce smooth, coherent lane detections across the scene.
Critical Analysis
The paper presents a promising approach for 3D lane detection that addresses several limitations of prior methods. The key strengths of this work include:
- Flexibility: The hierarchical shape matching allows the system to handle a wide range of lane types, including curved and discontinuous lanes, which is a significant improvement over many previous lane detection algorithms.
- Robustness: The hierarchical approach and refinement steps help the system overcome challenges like partial occlusions and produce more consistent lane detections.
- Potential for Real-World Deployment: The authors evaluate their method on both synthetic and real-world datasets, suggesting it may be practical for use in autonomous driving applications.
However, the paper does not discuss certain limitations or potential areas for further research, such as:
- Computational Efficiency: The hierarchical matching and refinement steps may introduce significant computational overhead, which could be a concern for real-time applications.
- Generalization to Diverse Environments: While the method is evaluated on several datasets, its performance on a broader range of road types, weather conditions, and sensor configurations is not explored.
- Dependency on Prior Lane Shape Knowledge: The reliance on a predefined database of lane shapes may limit the system's ability to adapt to novel or unexpected lane configurations.
Addressing these aspects in future work could further improve the flexibility and robustness of the 3D lane detection approach.
Conclusion
The "Flexible 3D Lane Detection by Hierarchical Shape Matching" paper presents an innovative method for detecting lane boundaries in 3D space from camera images. By using a hierarchical shape matching approach, the system can handle a wide variety of lane types, including curved and discontinuous lanes, which is a significant advancement over previous lane detection algorithms.
The proposed technique has the potential to improve the reliability and robustness of autonomous driving systems, which often rely on accurate lane detection to navigate safely. While the paper does not address certain limitations, such as computational efficiency and generalization to diverse environments, the overall approach represents an important step forward in the field of 3D lane detection for autonomous vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Flexible 3D Lane Detection by Hierarchical Shape MatchingFlexible 3D Lane Detection by Hierarchical Shape Matching
Zhihao Guan, Ruixin Liu, Zejian Yuan, Ao Liu, Kun Tang, Tong Zhou, Erlong Li, Chao Zheng, Shuqi Mei
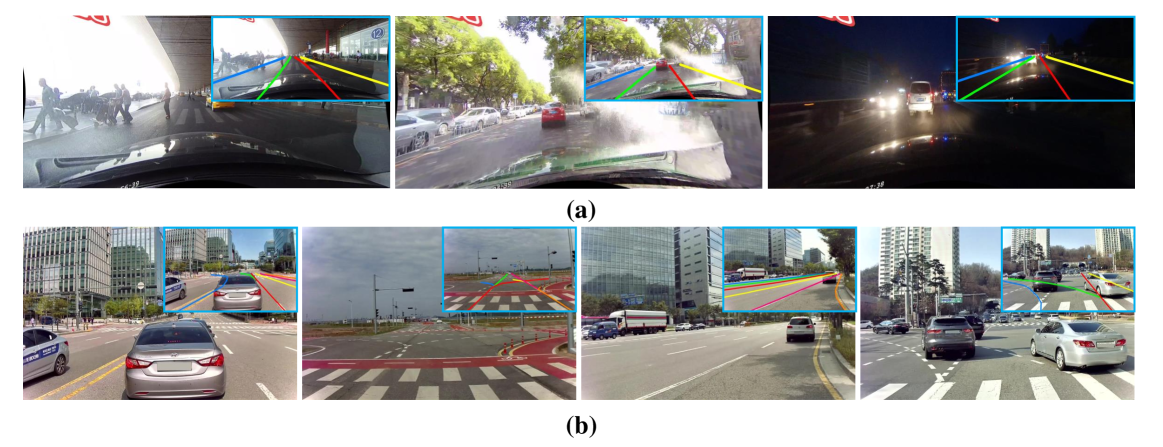
As one of the basic while vital technologies for HD map construction, 3D lane detection is still an open problem due to varying visual conditions, complex typologies, and strict demands for precision. In this paper, an end-to-end flexible and hierarchical lane detector is proposed to precisely predict 3D lane lines from point clouds. Specifically, we design a hierarchical network predicting flexible representations of lane shapes at different levels, simultaneously collecting global instance semantics and avoiding local errors. In the global scope, we propose to regress parametric curves w.r.t adaptive axes that help to make more robust predictions towards complex scenes, while in the local vision the structure of lane segment is detected in each of the dynamic anchor cells sampled along the global predicted curves. Moreover, corresponding global and local shape matching losses and anchor cell generation strategies are designed. Experiments on two datasets show that we overwhelm current top methods under high precision standards, and full ablation studies also verify each part of our method. Our codes will be released at https://github.com/Doo-do/FHLD.
Read more8/15/2024
🔎
0
3D Lane Detection from Front or Surround-View using Joint-Modeling & Matching
Haibin Zhou, Huabing Zhou, Jun Chang, Tao Lu, Jiayi Ma
3D lanes offer a more comprehensive understanding of the road surface geometry than 2D lanes, thereby providing crucial references for driving decisions and trajectory planning. While many efforts aim to improve prediction accuracy, we recognize that an efficient network can bring results closer to lane modeling. However, if the modeling data is imprecise, the results might not accurately capture the real-world scenario. Therefore, accurate lane modeling is essential to align prediction results closely with the environment. This study centers on efficient and accurate lane modeling, proposing a joint modeling approach that combines Bezier curves and interpolation methods. Furthermore, based on this lane modeling approach, we developed a Global2Local Lane Matching method with Bezier Control-Point and Key-Point, which serve as a comprehensive solution that leverages hierarchical features with two mathematical models to ensure a precise match. We also introduce a novel 3D Spatial Encoder, representing an exploration of 3D surround-view lane detection research. The framework is suitable for front-view or surround-view 3D lane detection. By directly outputting the key points of lanes in 3D space, it overcomes the limitations of anchor-based methods, enabling accurate prediction of closed-loop or U-shaped lanes and effective adaptation to complex road conditions. This innovative method establishes a new benchmark in front-view 3D lane detection on the Openlane dataset and achieves competitive performance in surround-view 2D lane detection on the Argoverse2 dataset.
Read more5/29/2024
0
ElasticLaneNet: An Efficient Geometry-Flexible Approach for Lane Detection
Yaxin Feng, Yuan Lan, Luchan Zhang, Yang Xiang
The task of lane detection involves identifying the boundaries of driving areas in real-time. Recognizing lanes with variable and complex geometric structures remains a challenge. In this paper, we explore a novel and flexible way of implicit lanes representation named textit{Elastic Lane map (ELM)}, and introduce an efficient physics-informed end-to-end lane detection framework, namely, ElasticLaneNet (Elastic interaction energy-informed Lane detection Network). The approach considers predicted lanes as moving zero-contours on the flexibly shaped textit{ELM} that are attracted to the ground truth guided by an elastic interaction energy-loss function (EIE loss). Our framework well integrates the global information and low-level features. The method performs well in complex lane scenarios, including those with large curvature, weak geometry features at intersections, complicated cross lanes, Y-shapes lanes, dense lanes, etc. We apply our approach on three datasets: SDLane, CULane, and TuSimple. The results demonstrate exceptional performance of our method, with the state-of-the-art results on the structurally diverse SDLane, achieving F1-score of 89.51, Recall rate of 87.50, and Precision of 91.61 with fast inference speed.
Read more4/4/2024

0
Unsupervised Non-Rigid Point Cloud Matching through Large Vision Models
Zhangquan Chen, Puhua Jiang, Ruqi Huang
In this paper, we propose a novel learning-based framework for non-rigid point cloud matching, which can be trained purely on point clouds without any correspondence annotation but also be extended naturally to partial-to-full matching. Our key insight is to incorporate semantic features derived from large vision models (LVMs) to geometry-based shape feature learning. Our framework effectively leverages the structural information contained in the semantic features to address ambiguities arise from self-similarities among local geometries. Furthermore, our framework also enjoys the strong generalizability and robustness regarding partial observations of LVMs, leading to improvements in the regarding point cloud matching tasks. In order to achieve the above, we propose a pixel-to-point feature aggregation module, a local and global attention network as well as a geometrical similarity loss function. Experimental results show that our method achieves state-of-the-art results in matching non-rigid point clouds in both near-isometric and heterogeneous shape collection as well as more realistic partial and noisy data.
Read more8/19/2024