On-the-fly Synthesis for LTL over Finite Traces: An Efficient Approach that Counts

0
Sign in to get full access
Overview
- The paper presents an efficient approach for on-the-fly synthesis of Linear Temporal Logic (LTL) over finite traces.
- The proposed method counts the number of models that satisfy the given LTL formula, which is more efficient than traditional approaches.
- The technique is designed to handle complex LTL formulas and can be applied to various domains, such as reactive system design and control synthesis.
Plain English Explanation
In this paper, the researchers introduce a new way to automatically generate programs or controllers that satisfy certain requirements, expressed using a formal language called Linear Temporal Logic (LTL). LTL allows you to specify how a system should behave over time, such as "the door must always be locked when the room is empty."
The researchers' key insight is that instead of simply checking whether a given LTL formula is satisfiable (i.e., can be made true), they can count the number of ways the formula can be satisfied. This "counting" approach is more efficient than traditional methods, especially for complex LTL formulas.
By efficiently generating all the possible ways a system can satisfy the given LTL requirements, the researchers' technique can be used to automatically synthesize controllers or programs that meet those requirements. This could be useful in a variety of applications, such as designing control systems for robots or autonomous vehicles, or generating software that must satisfy certain temporal constraints.
Technical Explanation
The paper presents an "on-the-fly" approach to the synthesis of controllers or programs that satisfy a given LTL formula over finite traces. The key innovation is the use of a counting-based synthesis technique, which is more efficient than traditional satisfiability-based methods.
The researchers develop a novel algorithm that computes the number of models (i.e., possible system behaviors) that satisfy the input LTL formula. This counting-based approach allows for more efficient exploration of the space of possible solutions, as opposed to simply checking whether a solution exists.
The paper describes the theoretical foundations of the counting-based synthesis technique, as well as optimizations and heuristics to improve its performance. The authors also provide a detailed experimental evaluation, showcasing the efficiency of their approach compared to state-of-the-art LTL synthesis tools.
Critical Analysis
The paper presents a novel and promising approach to LTL synthesis, with a focus on efficiency and scalability. The counting-based technique is a unique contribution and the experimental results suggest significant performance improvements over existing methods.
However, the paper does not address some potential limitations or areas for further research. For example, the approach is limited to finite traces, which may not be suitable for all applications. Additionally, the paper does not discuss the applicability of the technique to more complex LTL fragments or extensions, such as LTL with costs or rewards.
Further research could explore ways to extend the counting-based synthesis to other temporal logics or to handle infinite traces. Additionally, the integration of the proposed technique with higher-level system design and verification workflows could be an interesting direction for future work.
Conclusion
The paper presents an efficient on-the-fly synthesis approach for LTL over finite traces, based on a novel counting-based technique. This approach outperforms traditional satisfiability-based methods, especially for complex LTL formulas.
The researchers' work has the potential to significantly impact the design and verification of reactive systems, as well as other domains where temporal logic specifications play a crucial role. The efficient synthesis of controllers or programs that satisfy LTL requirements could lead to more reliable and predictable system behavior, with applications in areas such as robotics, autonomous vehicles, and industrial control systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
On-the-fly Synthesis for LTL over Finite Traces: An Efficient Approach that Counts
Shengping Xiao, Yongkang Li, Shufang Zhu, Jun Sun, Jianwen Li, Geguang Pu, Moshe Y. Vardi
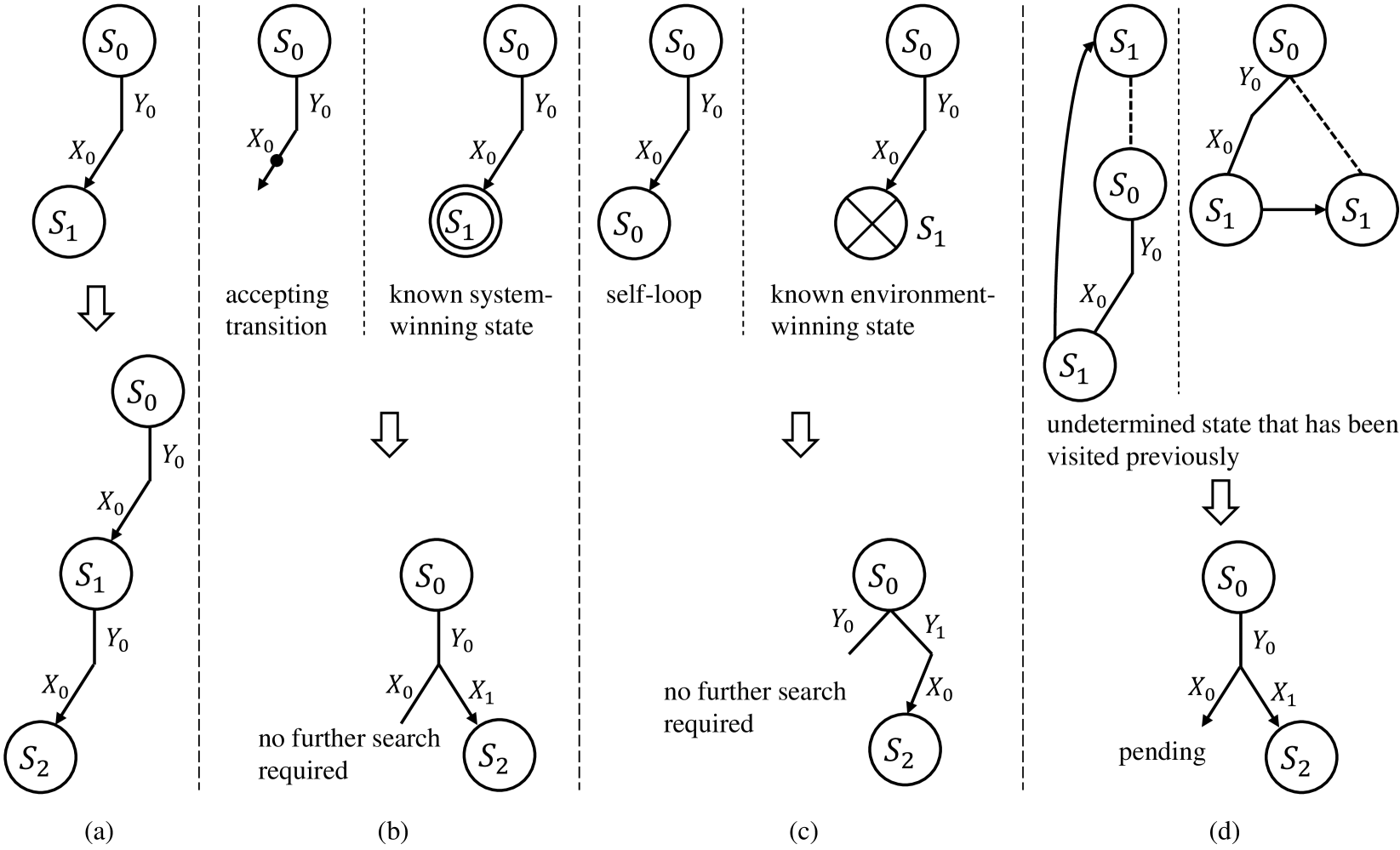
We present an on-the-fly synthesis framework for Linear Temporal Logic over finite traces (LTLf) based on top-down deterministic automata construction. Existing approaches rely on constructing a complete Deterministic Finite Automaton (DFA) corresponding to the LTLf specification, a process with doubly exponential complexity relative to the formula size in the worst case. In this case, the synthesis procedure cannot be conducted until the entire DFA is constructed. This inefficiency is the main bottleneck of existing approaches. To address this challenge, we first present a method for converting LTLf into Transition-based DFA (TDFA) by directly leveraging LTLf semantics, incorporating intermediate results as direct components of the final automaton to enable parallelized synthesis and automata construction. We then explore the relationship between LTLf synthesis and TDFA games and subsequently develop an algorithm for performing LTLf synthesis using on-the-fly TDFA game solving. This algorithm traverses the state space in a global forward manner combined with a local backward method, along with the detection of strongly connected components. Moreover, we introduce two optimization techniques -- model-guided synthesis and state entailment -- to enhance the practical efficiency of our approach. Experimental results demonstrate that our on-the-fly approach achieves the best performance on the tested benchmarks and effectively complements existing tools and approaches.
Read more8/15/2024

0
Predictable and Performant Reactive Synthesis Modulo Theories via Functional Synthesis
Andoni Rodr'iguez, Felipe Gorostiaga, C'esar S'anchez
Reactive synthesis is the process of generating correct controllers from temporal logic specifications. Classical LTL reactive synthesis handles (propositional) LTL as a specification language. Boolean abstractions allow reducing LTLt specifications (i.e., LTL with propositions replaced by literals from a theory calT), into equi-realizable LTL specifications. In this paper we extend these results into a full static synthesis procedure. The synthesized system receives from the environment valuations of variables from a rich theory calT and outputs valuations of system variables from calT. We use the abstraction method to synthesize a reactive Boolean controller from the LTL specification, and we combine it with functional synthesis to obtain a static controller for the original LTLt specification. We also show that our method allows responses in the sense that the controller can optimize its outputs in order to e.g., always provide the smallest safe values. This is the first full static synthesis method for LTLt, which is a deterministic program (hence predictable and efficient).
Read more7/15/2024
🛸
0
Flow-Based Synthesis of Reactive Tests for Discrete Decision-Making Systems with Temporal Logic Specifications
Josefine B. Graebener, Apurva S. Badithela, Denizalp Goktas, Wyatt Ubellacker, Eric V. Mazumdar, Aaron D. Ames, Richard M. Murray
Designing tests to evaluate if a given autonomous system satisfies complex specifications is challenging due to the complexity of these systems. This work proposes a flow-based approach for reactive test synthesis from temporal logic specifications, enabling the synthesis of test environments consisting of static and reactive obstacles and dynamic test agents. The temporal logic specifications describe desired test behavior, including system requirements as well as a test objective that is not revealed to the system. The synthesized test strategy places restrictions on system actions in reaction to the system state. The tests are minimally restrictive and accomplish the test objective while ensuring realizability of the system's objective without aiding it (semi-cooperative setting). Automata theory and flow networks are leveraged to formulate a mixed-integer linear program (MILP) to synthesize the test strategy. For a dynamic test agent, the agent strategy is synthesized for a GR(1) specification constructed from the solution of the MILP. If the specification is unrealizable by the dynamics of the test agent, a counterexample-guided approach is used to resolve the MILP until a strategy is found. This flow-based, reactive test synthesis is conducted offline and is agnostic to the system controller. Finally, the resulting test strategy is demonstrated in simulation and experimentally on a pair of quadrupedal robots for a variety of specifications.
Read more4/16/2024
🚀
0
Zonotope-based Symbolic Controller Synthesis for Linear Temporal Logic Specifications
Wei Ren, Raphael M. Jungers, Dimos V. Dimarogonas
This paper studies the controller synthesis problem for nonlinear control systems under linear temporal logic (LTL) specifications using zonotope techniques. A local-to-global control strategy is proposed for the desired specification expressed as an LTL formula. First, a novel approach is developed to divide the state space into finite zonotopes and constrained zonotopes, which are called cells and allowed to intersect with the neighbor cells. Second, from the intersection relation, a graph among all cells is generated to verify the realization of the accepting path for the LTL formula. The realization verification determines if there is a need for the control design, and also results in finite local LTL formulas. Third, once the accepting path is realized, a novel abstraction-based method is derived for the controller design. In particular, we only focus on the cells from the realization verification and approximate each cell thanks to properties of zonotopes. Based on local symbolic models and local LTL formulas, an iterative synthesis algorithm is proposed to design all local abstract controllers, whose existence and combination establish the global controller for the LTL formula. Finally, the proposed framework is illustrated via a path planning problem of mobile robots.
Read more5/3/2024