Force Profiling of a Shoulder Bidirectional Fabric-based Pneumatic Actuator for a Pediatric Exosuit

0
Sign in to get full access
Overview
- This paper presents an analysis of the force profile of a shoulder-mounted, bidirectional, fabric-based pneumatic actuator for a pediatric exosuit.
- The exosuit is designed to provide upper-limb support and assistance for children with physical disabilities.
- The researchers investigate the force-generation capabilities of the fabric-based actuator to understand its suitability for the target application.
Plain English Explanation
The researchers have developed a special kind of robotic 'suit' or 'exosuit' that can help children with physical disabilities move their arms more easily. This exosuit has a fabric-based pneumatic [<a href="https://aimodels.fyi/papers/arxiv/stretchable-pneumatic-sleeve-adaptable-low-displacement-anchoring">pneumatic</a>] actuator that can push and pull the shoulder joint to assist with arm movements.
In this paper, the team measures the forces this fabric-based actuator can generate to understand how well it can support the child's arm. They want to make sure the actuator is powerful enough to provide meaningful assistance without being overly strong and potentially causing harm. By studying the 'force profile' of the actuator, the researchers can evaluate its suitability for use in the pediatric exosuit.
Technical Explanation
The researchers designed and built a fabric-based, bidirectional pneumatic actuator to be used in a pediatric exosuit for upper-limb assistance. To evaluate the actuator's force-generation capabilities, they conducted experiments to measure the forces produced during both extension and flexion of the shoulder joint.
The actuator was mounted on a test platform that allowed for controlled shoulder movements. Pressure sensors were used to monitor the air pressure in the actuator, while force sensors measured the forces applied to the shoulder. The team performed trials at different air pressures and joint angles to characterize the actuator's force profile across its range of motion.
The results showed that the fabric-based actuator was able to generate significant forces in both the extension and flexion directions, with a peak force of over 40 N. The force output was found to be highly dependent on the air pressure and joint angle, providing the researchers with valuable insights into the actuator's performance [<a href="https://aimodels.fyi/papers/arxiv/optimized-design-soft-actuator-considering-forcetorque-bendability">design considerations</a>] for integration into the pediatric exosuit.
Critical Analysis
The paper provides a thorough characterization of the force profile for the fabric-based pneumatic actuator, which is a crucial step in evaluating its suitability for use in a pediatric exosuit. The experimental setup and methodology appear sound, and the results offer valuable insights into the actuator's capabilities.
However, the paper does not address potential limitations or challenges related to the long-term reliability, durability, or safety of the fabric-based actuator when used in a wearable device for children. Additional research may be needed to ensure the actuator can withstand the demands of real-world use and provide consistent, safe, and effective support over extended periods [<a href="https://aimodels.fyi/papers/arxiv/self-sensing-feedback-control-electrohydraulic-robotic-shoulder">feedback control</a>].
Furthermore, the paper does not discuss the integration of the actuator into the overall exosuit design or how it would work in conjunction with other components, such as sensors and control systems, to provide a seamless and effective upper-limb assistance solution [<a href="https://aimodels.fyi/papers/arxiv/soft-wrist-exosuit-actuated-by-fabric-pneumatic">integrated design</a>].
Conclusion
This paper presents a detailed analysis of the force profile of a fabric-based, bidirectional pneumatic actuator designed for use in a pediatric exosuit. The researchers' findings demonstrate the actuator's ability to generate significant forces in both extension and flexion, which is a crucial characteristic for providing effective upper-limb assistance to children with physical disabilities.
While the technical aspects of the actuator's performance are well-documented, further research may be needed to address potential long-term reliability and safety concerns, as well as the integration of the actuator into a complete exosuit system. Nevertheless, this work represents an important step towards the development of advanced, fabric-based assistive technologies that can improve the quality of life for children with physical limitations.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Force Profiling of a Shoulder Bidirectional Fabric-based Pneumatic Actuator for a Pediatric Exosuit
Mehrnoosh Ayazi, Ipsita Sahin, Caio Mucchiani, Elena Kokkoni, Konstantinos Karydis
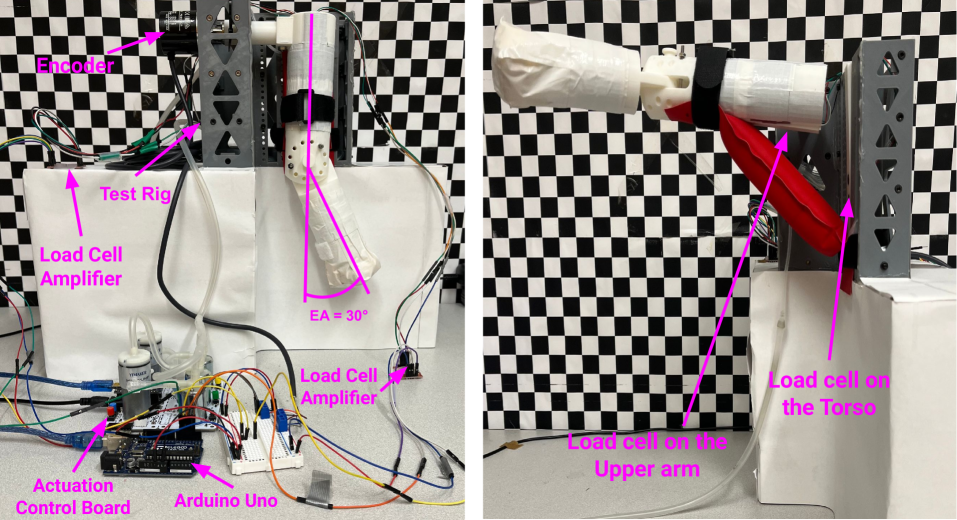
This paper presents a comprehensive analysis of the contact force profile of a single-cell bidirectional soft pneumatic actuator, specifically designed to aid in the abduction and adduction of the shoulder for pediatric exosuits. The actuator was embedded in an infant-scale test rig featuring two degrees of freedom: an actuated revolute joint supporting shoulder abduction/adduction and a passive (but lockable) revolute joint supporting elbow flexion/extension. Integrated load cells and an encoder within the rig were used to measure the force applied by the actuator and the shoulder joint angle, respectively. The actuator's performance was evaluated under various anchoring points and elbow joint angles. Experimental results demonstrate that optimal performance, characterized by maximum range of motion and minimal force applied on the torso and upper arm, can be achieved when the actuator is anchored at two-thirds the length of the upper arm, with the elbow joint positioned at a 90-degree angle. The force versus pressure and joint angle graphs reveal nonlinear and hysteresis behaviors. The findings of this study yield insights about optimal anchoring points and elbow angles to minimize exerted forces without reducing the range of motion.
Read more7/19/2024
📶
0
Soft Wrist Exosuit Actuated by Fabric Pneumatic Artificial Muscles
Katalin Schaffer, Yasemin Ozkan-Aydin, Margaret M. Coad
Recently, soft actuator-based exosuits have gained interest, due to their high strength-to-weight ratio, inherent safety, and low cost. We present a novel wrist exosuit actuated by fabric pneumatic artificial muscles that has lightweight wearable components (160 g) and can move the wrist in flexion/extension and ulnar/radial deviation. We derive a model representing the torque exerted by the exosuit and demonstrate the use of the model to choose an optimal design for an example user. We evaluate the accuracy of the model by measuring the exosuit torques throughout the full range of wrist flexion/extension. We show the importance of accounting for the displacement of the mounting points, as this helps to achieve the smallest mean absolute error (0.283 Nm) compared to other models. Furthermore, we present the measurement of the exosuit-actuated range of motion on a passive human wrist. Finally, we demonstrate the device controlling the passive human wrist to move to a desired orientation along a one and a two-degree-of-freedom trajectory. The evaluation results show that, compared to other pneumatically actuated wrist exosuits, the presented exosuit is lightweight and strong (with peak torque of 3.3 Nm) but has a limited range of motion.
Read more4/15/2024

0
Self-Sensing Feedback Control of an Electrohydraulic Robotic Shoulder
Clemens C. Christoph, Amirhossein Kazemipour, Michel R. Vogt, Yu Zhang, Robert K. Katzschmann
The human shoulder, with its glenohumeral joint, tendons, ligaments, and muscles, allows for the execution of complex tasks with precision and efficiency. However, current robotic shoulder designs lack the compliance and compactness inherent in their biological counterparts. A major limitation of these designs is their reliance on external sensors like rotary encoders, which restrict mechanical joint design and introduce bulk to the system. To address this constraint, we present a bio-inspired antagonistic robotic shoulder with two degrees of freedom powered by self-sensing hydraulically amplified self-healing electrostatic actuators. Our artificial muscle design decouples the high-voltage electrostatic actuation from the pair of low-voltage self-sensing electrodes. This approach allows for proprioceptive feedback control of trajectories in the task space while eliminating the necessity for any additional sensors. We assess the platform's efficacy by comparing it to a feedback control based on position data provided by a motion capture system. The study demonstrates closed-loop controllable robotic manipulators based on an inherent self-sensing capability of electrohydraulic actuators. The proposed architecture can serve as a basis for complex musculoskeletal joint arrangements.
Read more4/8/2024
0
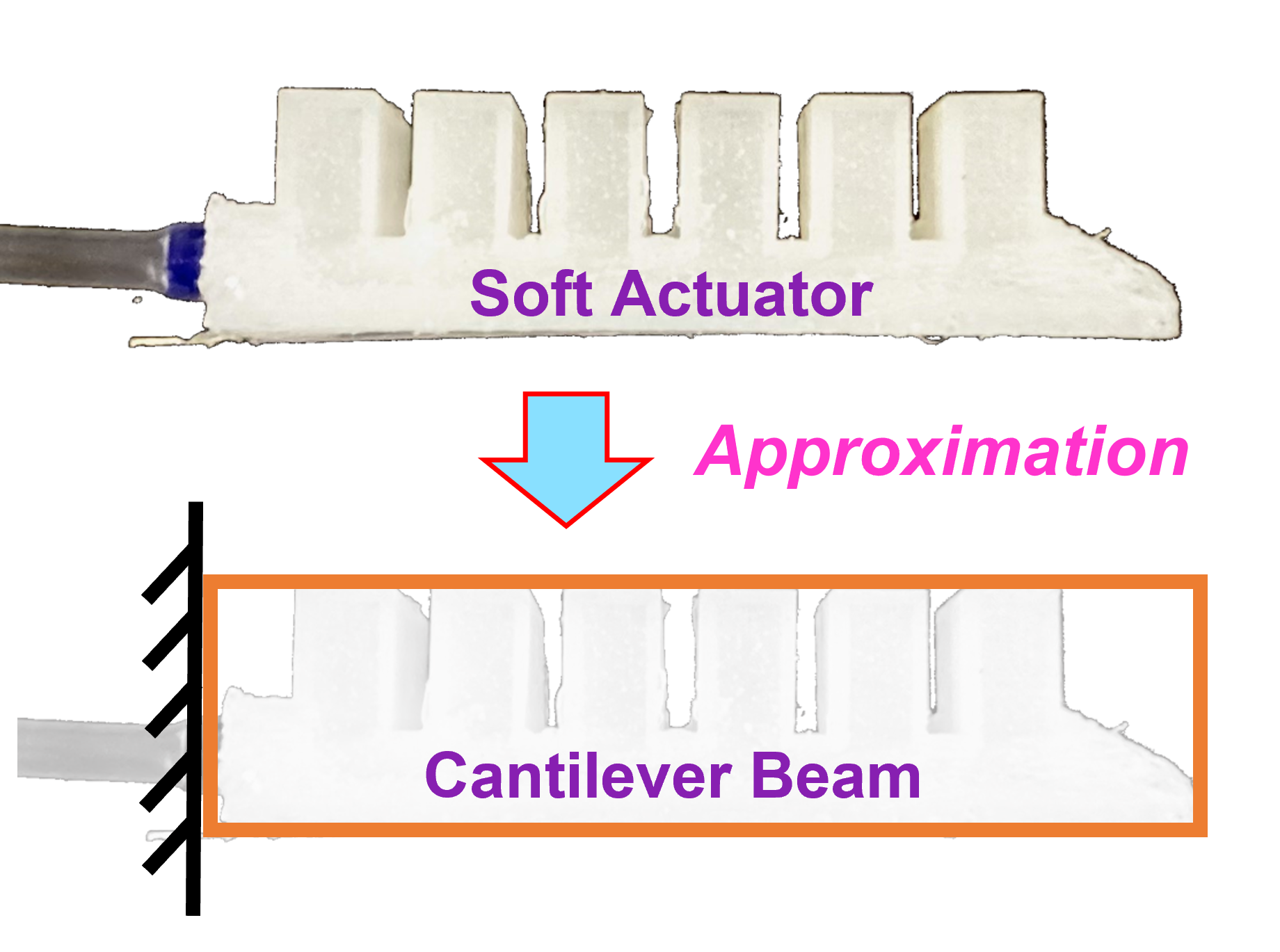
Optimized Design of a Soft Actuator Considering Force/Torque, Bendability, and Controllability via an Approximated Structure
Wu-Te Yang, Burak Kurkcu, Masayoshi Tomizuka
This paper introduces a novel design method that enhances the force/torque, bendability, and controllability of soft pneumatic actuators (SPAs). The complex structure of the soft actuator is simplified by approximating it as a cantilever beam. This allows us to derive approximated nonlinear kinematic models and a dynamical model, which is explored to understand the correlation between natural frequency and dimensional parameters of SPA. The design problem is then transformed into an optimization problem, using kinematic equations as the objective function and the dynamical equation as a constraint. By solving this optimization problem, the optimal dimensional parameters are determined. Six prototypes are manufactured to validate the proposed approach. The optimal actuator successfully generates the desired force/torque and bending angle, while its natural frequency remains within the constrained range. This work highlights the potential of using optimization formulation and approximated nonlinear models to boost the performance and dynamical properties of soft pneumatic actuators.
Read more4/16/2024