Forearm Ultrasound based Gesture Recognition on Edge

0
Sign in to get full access
Overview
- Ultrasound-based gesture recognition system for edge devices
- Enables intuitive human-computer interaction using hand gestures
- Aims to be robust, low-power, and portable for real-world applications
Plain English Explanation
This research paper describes a new way to recognize hand gestures using ultrasound signals from sensors placed on the forearm. The key idea is to use these ultrasound signals to detect and classify different hand gestures, which can then be used to control various devices or interfaces.
The researchers developed a system that can run on edge devices, meaning small, low-power computers close to the user rather than in a central server. This makes the system more portable and responsive for real-world applications like gaming, smart home control, or accessibility tools.
The main benefits of this approach are that it is robust to environmental conditions, low-power, and can be used without specialized equipment or obtrusive sensors. By using the forearm as the sensing location, it also allows for more natural and intuitive hand gestures compared to systems that require the user to hold a specific device.
Technical Explanation
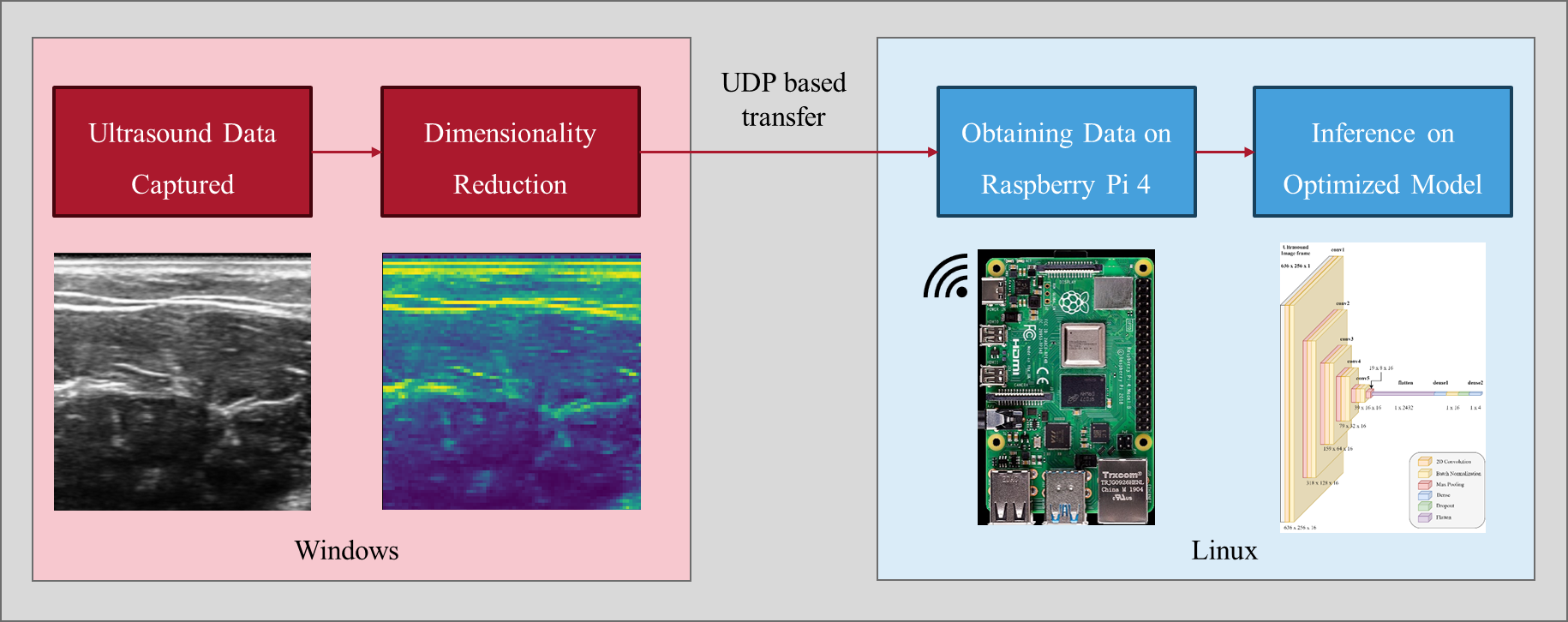
The researchers designed an experimental framework that uses multiple ultrasound transducers placed around the forearm to capture the muscle movements associated with different hand gestures. They collected a dataset of various static and dynamic gestures from multiple participants and used deep learning models to classify the gestures from the ultrasound data.
Key aspects of their technical approach include:
- Using a convolutional neural network architecture to extract features from the 2D ultrasound images
- Incorporating temporal information by feeding sequences of ultrasound frames into the network
- Optimizing the model for deployment on edge devices with constraints on memory and computing power
The results demonstrate that this ultrasound-based approach can achieve high accuracy in recognizing a variety of hand gestures, while also being power-efficient and suitable for real-time, on-device inference.
Critical Analysis
The paper provides a thorough evaluation of the system's performance and discusses some of the limitations and future research directions. For example, the authors note that the current setup requires the user to wear a custom forearm strap, which may limit the system's practicality for some applications.
Additionally, the dataset used for training and evaluation was collected in a controlled laboratory environment, so further research is needed to assess the system's robustness in real-world conditions with more diverse users and environments.
The paper also does not explore the privacy implications of using ultrasound sensors on the body, which could be a concern for some users.
Conclusion
This research presents a promising approach for enabling intuitive hand gesture-based interactions using ultrasound sensors on the forearm. The ability to run the system on edge devices makes it well-suited for a variety of real-world applications, such as gaming, smart home control, and accessibility tools. Further development and testing will be needed to address the identified limitations and ensure the system is robust, reliable, and respects user privacy.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Forearm Ultrasound based Gesture Recognition on Edge
Keshav Bimbraw, Haichong K. Zhang, Bashima Islam
Ultrasound imaging of the forearm has demonstrated significant potential for accurate hand gesture classification. Despite this progress, there has been limited focus on developing a stand-alone end- to-end gesture recognition system which makes it mobile, real-time and more user friendly. To bridge this gap, this paper explores the deployment of deep neural networks for forearm ultrasound-based hand gesture recognition on edge devices. Utilizing quantization techniques, we achieve substantial reductions in model size while maintaining high accuracy and low latency. Our best model, with Float16 quantization, achieves a test accuracy of 92% and an inference time of 0.31 seconds on a Raspberry Pi. These results demonstrate the feasibility of efficient, real-time gesture recognition on resource-limited edge devices, paving the way for wearable ultrasound-based systems.
Read more9/17/2024
🧪
0
A Technique for Classifying Static Gestures Using UWB Radar
Abhishek Sebastian, Pragna R
Our paper presents a robust framework for UWB-based static gesture recognition, leveraging proprietary UWB radar sensor technology. Extensive data collection efforts were undertaken to compile datasets containing five commonly used gestures. Our approach involves a comprehensive data pre-processing pipeline that encompasses outlier handling, aspect ratio-preserving resizing, and false-color image transformation. Both CNN and MobileNet models were trained on the processed images. Remarkably, our best-performing model achieved an accuracy of 96.78%. Additionally, we developed a user-friendly GUI framework to assess the model's system resource usage and processing times, which revealed low memory utilization and real-time task completion in under one second. This research marks a significant step towards enhancing static gesture recognition using UWB technology, promising practical applications in various domains.
Read more4/15/2024

0
GPT Sonograpy: Hand Gesture Decoding from Forearm Ultrasound Images via VLM
Keshav Bimbraw, Ye Wang, Jing Liu, Toshiaki Koike-Akino
Large vision-language models (LVLMs), such as the Generative Pre-trained Transformer 4-omni (GPT-4o), are emerging multi-modal foundation models which have great potential as powerful artificial-intelligence (AI) assistance tools for a myriad of applications, including healthcare, industrial, and academic sectors. Although such foundation models perform well in a wide range of general tasks, their capability without fine-tuning is often limited in specialized tasks. However, full fine-tuning of large foundation models is challenging due to enormous computation/memory/dataset requirements. We show that GPT-4o can decode hand gestures from forearm ultrasound data even with no fine-tuning, and improves with few-shot, in-context learning.
Read more7/16/2024
👁️
0
Ultra-Range Gesture Recognition using a Web-Camera in Human-Robot Interaction
Eran Bamani, Eden Nissinman, Inbar Meir, Lisa Koenigsberg, Avishai Sintov
Hand gestures play a significant role in human interactions where non-verbal intentions, thoughts and commands are conveyed. In Human-Robot Interaction (HRI), hand gestures offer a similar and efficient medium for conveying clear and rapid directives to a robotic agent. However, state-of-the-art vision-based methods for gesture recognition have been shown to be effective only up to a user-camera distance of seven meters. Such a short distance range limits practical HRI with, for example, service robots, search and rescue robots and drones. In this work, we address the Ultra-Range Gesture Recognition (URGR) problem by aiming for a recognition distance of up to 25 meters and in the context of HRI. We propose the URGR framework, a novel deep-learning, using solely a simple RGB camera. Gesture inference is based on a single image. First, a novel super-resolution model termed High-Quality Network (HQ-Net) uses a set of self-attention and convolutional layers to enhance the low-resolution image of the user. Then, we propose a novel URGR classifier termed Graph Vision Transformer (GViT) which takes the enhanced image as input. GViT combines the benefits of a Graph Convolutional Network (GCN) and a modified Vision Transformer (ViT). Evaluation of the proposed framework over diverse test data yields a high recognition rate of 98.1%. The framework has also exhibited superior performance compared to human recognition in ultra-range distances. With the framework, we analyze and demonstrate the performance of an autonomous quadruped robot directed by human gestures in complex ultra-range indoor and outdoor environments, acquiring 96% recognition rate on average.
Read more4/11/2024