Formally Verified Approximate Policy Iteration

0
🔗
Sign in to get full access
Overview
- This paper presents a framework for formally verifying the correctness of approximate policy iteration algorithms, which are a type of reinforcement learning algorithm used to solve Markov Decision Processes (MDPs).
- The authors develop a verified implementation of an approximate policy iteration algorithm in the Isabelle/HOL theorem prover, and prove key properties about the algorithm's convergence and error bounds.
- The paper demonstrates how formal verification techniques can be applied to reinforce the reliability and robustness of approximate reinforcement learning algorithms.
Plain English Explanation
The paper discusses a way to mathematically prove that a certain type of reinforcement learning algorithm works correctly. Reinforcement learning is a technique used in artificial intelligence to train agents to make decisions in complex, uncertain environments, like playing chess or controlling a robot.
One popular reinforcement learning algorithm is called approximate policy iteration. This algorithm iteratively improves a policy (i.e. a set of rules for making decisions) by alternating between evaluating the current policy and updating it to be better. However, this algorithm uses approximations, which can introduce errors.
The authors of this paper developed a version of the approximate policy iteration algorithm that they were able to formally verify using a mathematical proof assistant called Isabelle/HOL. This means they mathematically proved that their implementation of the algorithm has certain desirable properties, like guarantees that it will converge to an optimal policy and bounds on the error introduced by the approximations.
By formally verifying the correctness of this reinforcement learning algorithm, the authors aim to increase trust in the reliability and robustness of such algorithms, which is important as they become more widely used in high-stakes applications like self-driving cars or medical decision support systems.
Technical Explanation
The paper introduces a formally verified implementation of an approximate policy iteration algorithm for solving Markov Decision Processes (MDPs) in the Isabelle/HOL theorem prover. The authors develop a framework for modeling approximate policy iteration and prove key properties about the convergence and error bounds of the algorithm.
Specifically, the authors prove that their approximate policy iteration algorithm is guaranteed to converge to an optimal policy, and they derive explicit bounds on the error between the true optimal value function and the value function computed by the algorithm. These error bounds depend on the quality of the function approximation used by the algorithm, as well as other problem-specific parameters.
The authors demonstrate the application of their framework by instantiating it with a concrete approximate policy iteration algorithm that uses a linear function approximator. They prove that this specific algorithm satisfies the required properties, and also provide a case study applying the algorithm to a simple gridworld MDP.
The formal verification approach used in this paper helps to increase confidence in the reliability and robustness of reinforcement learning algorithms, which is crucial as they are increasingly deployed in high-stakes applications. By proving the correctness of the algorithm mathematically, the authors aim to provide a solid theoretical foundation for the use of approximate policy iteration methods in practice.
Critical Analysis
The key strength of this work is the formal verification approach, which provides rigorous mathematical guarantees about the correctness of the approximate policy iteration algorithm. This is an important contribution, as reinforcement learning algorithms can be difficult to analyze theoretically, and errors or instabilities in the algorithms can have serious consequences in real-world applications.
One potential limitation of the work is the focus on a specific class of approximate policy iteration algorithms that use linear function approximation. While this allows the authors to prove strong theoretical results, it may limit the generality and applicability of the framework to other types of function approximation, such as neural networks, which are commonly used in modern reinforcement learning.
Additionally, the paper does not address several practical considerations that may arise when deploying such formally verified algorithms, such as the computational complexity of the verification process, the difficulty of specifying accurate MDP models in complex real-world domains, and the challenge of bridging the gap between the theoretical guarantees and the actual behavior of the algorithm when applied to realistic problems.
Further research could explore ways to expand the formal verification approach to handle more expressive function approximation methods, or to integrate it with techniques for learning accurate MDP models from data. Investigations into the practical feasibility and scalability of the verification process would also be valuable.
Overall, this paper represents an important step towards increasing the reliability and trustworthiness of reinforcement learning algorithms through the use of formal verification techniques. The authors have laid a solid theoretical foundation that could inspire further developments in this direction.
Conclusion
This paper presents a formally verified implementation of an approximate policy iteration algorithm for solving Markov Decision Processes. By developing a framework for modeling the algorithm and proving key properties about its convergence and error bounds, the authors have made a significant contribution to increasing the reliability and robustness of reinforcement learning methods.
The formal verification approach used in this work helps to build confidence in the correctness of the algorithm, which is crucial as reinforcement learning becomes more widely deployed in high-stakes applications. While the current implementation is limited to linear function approximation, the general principles and techniques demonstrated in this paper could be extended to handle more expressive function approximation methods in the future.
Overall, this research represents an important step forward in the quest to develop trustworthy and dependable artificial intelligence systems, and the authors have provided a valuable blueprint for applying formal verification techniques to other reinforcement learning algorithms and domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔗
0
Formally Verified Approximate Policy Iteration
Maximilian Schaffeler, Mohammad Abdulaziz
We formally verify an algorithm for approximate policy iteration on Factored Markov Decision Processes using the interactive theorem prover Isabelle/HOL. Next, we show how the formalized algorithm can be refined to an executable, verified implementation. The implementation is evaluated on benchmark problems to show its practicability. As part of the refinement, we develop verified software to certify Linear Programming solutions. The algorithm builds on a diverse library of formalized mathematics and pushes existing methodologies for interactive theorem provers to the limits. We discuss the process of the verification project and the modifications to the algorithm needed for formal verification.
Read more6/12/2024
🗣️
0
Approximate Linear Programming for Decentralized Policy Iteration in Cooperative Multi-agent Markov Decision Processes
Lakshmi Mandal, Chandrashekar Lakshminarayanan, Shalabh Bhatnagar
In this work, we consider a cooperative multi-agent Markov decision process (MDP) involving m agents. At each decision epoch, all the m agents independently select actions in order to maximize a common long-term objective. In the policy iteration process of multi-agent setup, the number of actions grows exponentially with the number of agents, incurring huge computational costs. Thus, recent works consider decentralized policy improvement, where each agent improves its decisions unilaterally, assuming that the decisions of the other agents are fixed. However, exact value functions are considered in the literature, which is computationally expensive for a large number of agents with high dimensional state-action space. Thus, we propose approximate decentralized policy iteration algorithms, using approximate linear programming with function approximation to compute the approximate value function for decentralized policy improvement. Further, we consider (both) cooperative multi-agent finite and infinite horizon discounted MDPs and propose suitable algorithms in each case. Moreover, we provide theoretical guarantees for our algorithms and also demonstrate their advantages over existing state-of-the-art algorithms in the literature.
Read more5/1/2024
0
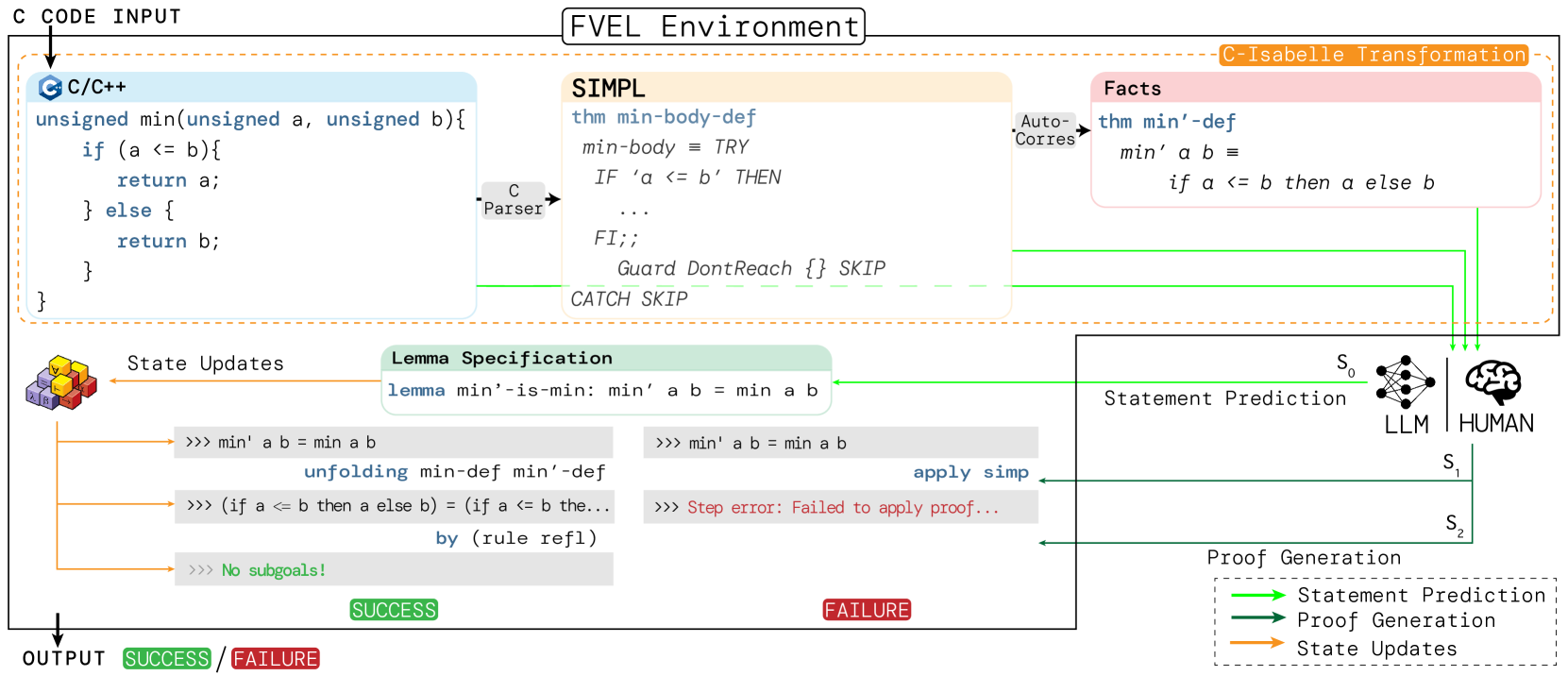
FVEL: Interactive Formal Verification Environment with Large Language Models via Theorem Proving
Xiaohan Lin, Qingxing Cao, Yinya Huang, Haiming Wang, Jianqiao Lu, Zhengying Liu, Linqi Song, Xiaodan Liang
Formal verification (FV) has witnessed growing significance with current emerging program synthesis by the evolving large language models (LLMs). However, current formal verification mainly resorts to symbolic verifiers or hand-craft rules, resulting in limitations for extensive and flexible verification. On the other hand, formal languages for automated theorem proving, such as Isabelle, as another line of rigorous verification, are maintained with comprehensive rules and theorems. In this paper, we propose FVEL, an interactive Formal Verification Environment with LLMs. Specifically, FVEL transforms a given code to be verified into Isabelle, and then conducts verification via neural automated theorem proving with an LLM. The joined paradigm leverages the rigorous yet abundant formulated and organized rules in Isabelle and is also convenient for introducing and adjusting cutting-edge LLMs. To achieve this goal, we extract a large-scale FVELER3. The FVELER dataset includes code dependencies and verification processes that are formulated in Isabelle, containing 758 theories, 29,125 lemmas, and 200,646 proof steps in total with in-depth dependencies. We benchmark FVELER in the FVEL environment by first fine-tuning LLMs with FVELER and then evaluating them on Code2Inv and SV-COMP. The results show that FVEL with FVELER fine-tuned Llama3- 8B solves 17.39% (69 -> 81) more problems, and Mistral-7B 12% (75 -> 84) more problems in SV-COMP. And the proportion of proof errors is reduced. Project page: https://fveler.github.io/.
Read more6/24/2024
📶
0
High-probability sample complexities for policy evaluation with linear function approximation
Gen Li, Weichen Wu, Yuejie Chi, Cong Ma, Alessandro Rinaldo, Yuting Wei
This paper is concerned with the problem of policy evaluation with linear function approximation in discounted infinite horizon Markov decision processes. We investigate the sample complexities required to guarantee a predefined estimation error of the best linear coefficients for two widely-used policy evaluation algorithms: the temporal difference (TD) learning algorithm and the two-timescale linear TD with gradient correction (TDC) algorithm. In both the on-policy setting, where observations are generated from the target policy, and the off-policy setting, where samples are drawn from a behavior policy potentially different from the target policy, we establish the first sample complexity bound with high-probability convergence guarantee that attains the optimal dependence on the tolerance level. We also exhihit an explicit dependence on problem-related quantities, and show in the on-policy setting that our upper bound matches the minimax lower bound on crucial problem parameters, including the choice of the feature maps and the problem dimension.
Read more5/3/2024