A Survey on Hybrid Motion Planning Methods for Automated Driving Systems
2406.05575
0
0
Abstract
Motion planning is an essential element of the modular architecture of autonomous vehicles, serving as a bridge between upstream perception modules and downstream low-level control signals. Traditional motion planners were initially designed for specific Automated Driving Functions (ADFs), yet the evolving landscape of highly automated driving systems (ADS) requires motion for a wide range of ADFs, including unforeseen ones. This need has motivated the development of the ``hybrid approach in the literature, seeking to enhance motion planning performance by combining diverse techniques, such as data-driven (learning-based) and logic-driven (analytic) methodologies. Recent research endeavours have significantly contributed to the development of more efficient, accurate, and safe hybrid methods for Tactical Decision Making (TDM) and Trajectory Generation (TG), as well as integrating these algorithms into the motion planning module. Owing to the extensive variety and potential of hybrid methods, a timely and comprehensive review of the current literature is undertaken in this survey article. We classify the hybrid motion planners based on the types of components they incorporate, such as combinations of sampling-based with optimization-based/learning-based motion planners. The comparison of different classes is conducted by evaluating the addressed challenges and limitations, as well as assessing whether they focus on TG and/or TDM. We hope this approach will enable the researchers in this field to gain in-depth insights into the identification of current trends in hybrid motion planning and shed light on promising areas for future research.
Create account to get full access
Overview
- This paper presents a survey on hybrid motion planning methods for automated driving systems.
- It covers background on motion planning, existing hybrid planning approaches, and the key challenges and considerations in this domain.
- The survey aims to provide a comprehensive overview of the state-of-the-art in hybrid motion planning for autonomous vehicles.
Plain English Explanation
Self-driving cars rely on complex motion planning algorithms to navigate safely and efficiently through dynamic environments. Towards General-Purpose Motion Planning for Autonomous Vehicles and Motion Planning as a Hybrid Dynamical Systems Framework and Algorithm are two key examples of research in this area.
Hybrid planning approaches combine different techniques, like rule-based decision making and optimization-based trajectory generation, to handle the various challenges of autonomous driving. This can include things like real-time motion planning in dynamic environments, guided motion planning using a high-level framework, and ensuring safe, real-time planning.
The goal of this survey is to provide a comprehensive overview of the state-of-the-art in hybrid motion planning for self-driving cars. It covers the key concepts, existing approaches, and the unique challenges in this domain. By understanding the current landscape, researchers and engineers can better develop robust and reliable motion planning systems for automated driving.
Technical Explanation
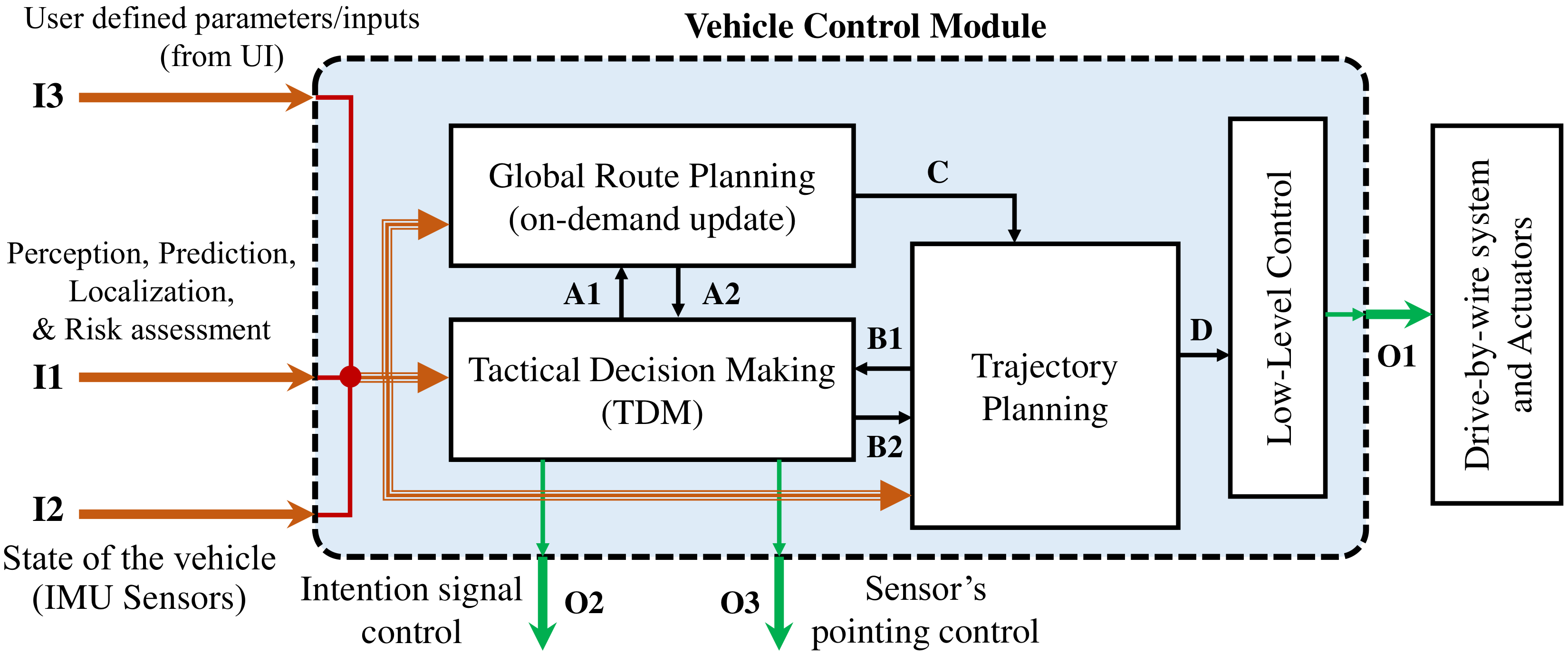
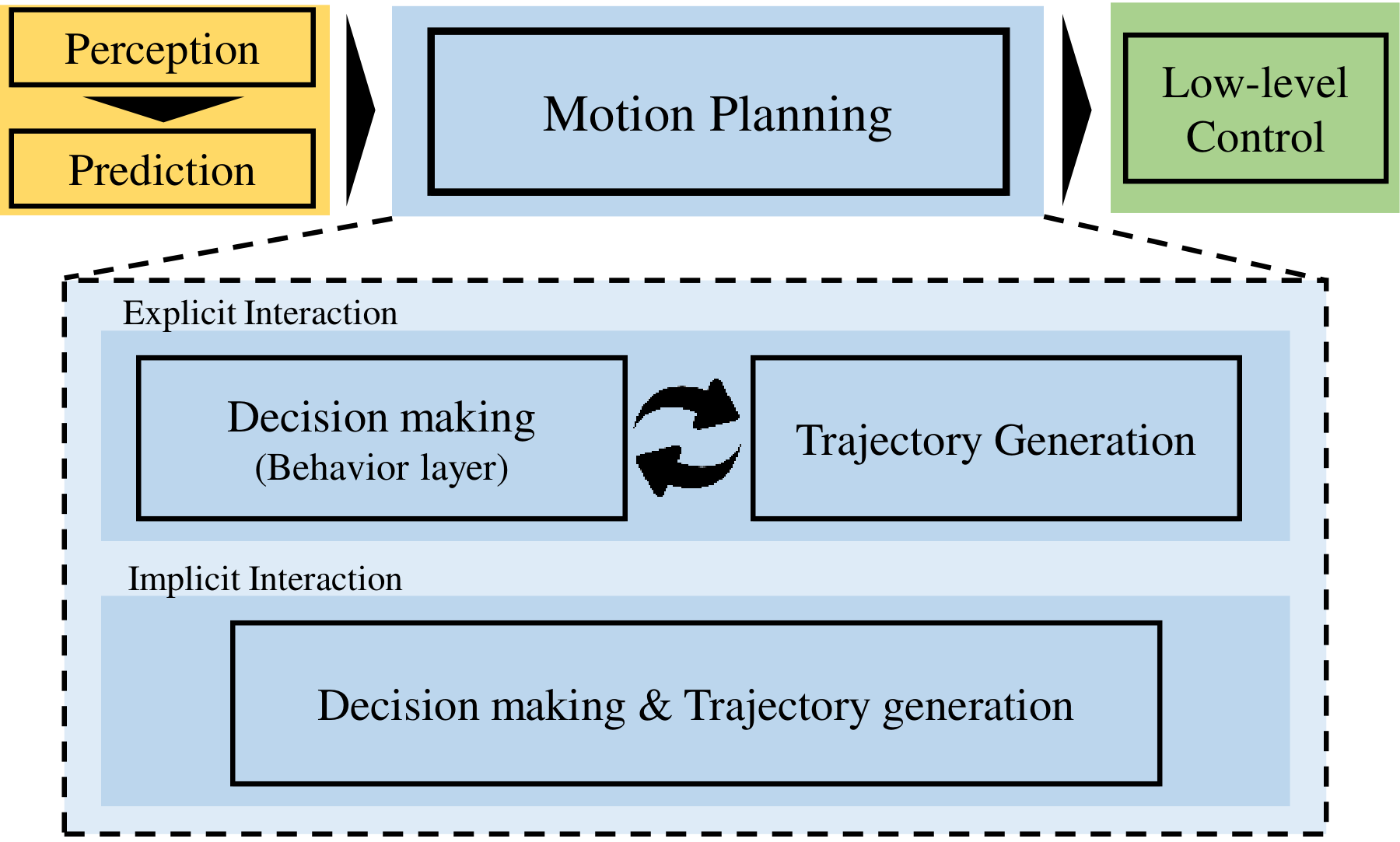
The paper begins by providing background on motion planning for automated driving systems. It discusses the two main components: tactical/behavioral decision making and trajectory generation. Tactical decision making involves high-level reasoning about driving maneuvers, while trajectory generation computes the specific path the vehicle should take.
The survey then reviews various hybrid planning approaches that combine these two elements. This includes methods that use rule-based systems for decision making coupled with optimization-based trajectory generation, as well as approaches that leverage machine learning for parts of the planning pipeline.
Key challenges addressed in hybrid planning include handling dynamic environments, ensuring safety and comfort, and achieving real-time performance. The paper discusses how existing techniques, such as Towards Safe Real-Time Motion Planning Framework, tackle these issues.
Overall, the survey covers the state-of-the-art in hybrid motion planning for automated driving, highlighting the strengths and limitations of different techniques. It aims to serve as a comprehensive reference for researchers and engineers working in this field.
Critical Analysis
The survey provides a thorough overview of hybrid motion planning methods for automated driving, but it does not delve into the specific details or performance characteristics of individual approaches. While this is understandable given the broad scope, it would be helpful to have a more in-depth analysis of the tradeoffs and relative merits of the different techniques.
Additionally, the paper does not address potential issues with the underlying assumptions or limitations of the hybrid planning paradigm itself. For example, the reliance on accurate perception and modeling of the environment, or the challenges in seamlessly integrating decision making and trajectory generation. Exploring these types of fundamental concerns could provide additional insights and guide future research directions.
Finally, the survey could benefit from a more critical assessment of the current state of the field and the remaining open challenges. While it highlights key issues like real-time performance and safety, a deeper discussion of the unsolved problems and areas requiring further innovation would strengthen the paper's contribution.
Conclusion
This survey offers a comprehensive look at the current state of hybrid motion planning for automated driving systems. It provides a solid foundation for understanding the key concepts, existing approaches, and the unique challenges in this domain.
By highlighting the strengths and limitations of different hybrid planning techniques, the paper helps researchers and engineers identify areas for further investigation and development. Ultimately, this work can contribute to the advancement of more robust and reliable motion planning systems for self-driving cars, which is crucial for the safe and widespread adoption of this transformative technology.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024
Motion Planning for Hybrid Dynamical Systems: Framework, Algorithm Template, and a Sampling-based Approach
Nan Wang, Ricardo G. Sanfelice
0
0
This paper focuses on the motion planning problem for the systems exhibiting both continuous and discrete behaviors, which we refer to as hybrid dynamical systems. Firstly, the motion planning problem for hybrid systems is formulated using the hybrid equation framework, which is general to capture most hybrid systems. Secondly, a propagation algorithm template is proposed that describes a general framework to solve the motion planning problem for hybrid systems. Thirdly, a rapidly-exploring random trees (RRT) implementation of the proposed algorithm template is designed to solve the motion planning problem for hybrid systems. At each iteration, the proposed algorithm, called HyRRT, randomly picks a state sample and extends the search tree by flow or jump, which is also chosen randomly when both regimes are possible. Through a definition of concatenation of functions defined on hybrid time domains, we show that HyRRT is probabilistically complete, namely, the probability of failing to find a motion plan approaches zero as the number of iterations of the algorithm increases. This property is guaranteed under mild conditions on the data defining the motion plan, which include a relaxation of the usual positive clearance assumption imposed in the literature of classical systems. The motion plan is computed through the solution of two optimization problems, one associated with the flow and the other with the jumps of the system. The proposed algorithm is applied to an actuated bouncing ball system and a walking robot system so as to highlight its generality and computational features.
6/5/2024

Real-time Motion Planning for autonomous vehicles in dynamic environments
Mohammad Dehghani Tezerjani, Dominic Carrillo, Deyuan Qu, Sudip Dhakal, Amir Mirzaeinia, Qing Yang
0
0
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
6/6/2024

Planning with Adaptive World Models for Autonomous Driving
Arun Balajee Vasudevan, Neehar Peri, Jeff Schneider, Deva Ramanan
0
0
Motion planning is crucial for safe navigation in complex urban environments. Historically, motion planners (MPs) have been evaluated with procedurally-generated simulators like CARLA. However, such synthetic benchmarks do not capture real-world multi-agent interactions. nuPlan, a recently released MP benchmark, addresses this limitation by augmenting real-world driving logs with closed-loop simulation logic, effectively turning the fixed dataset into a reactive simulator. We analyze the characteristics of nuPlan's recorded logs and find that each city has its own unique driving behaviors, suggesting that robust planners must adapt to different environments. We learn to model such unique behaviors with BehaviorNet, a graph convolutional neural network (GCNN) that predicts reactive agent behaviors using features derived from recently-observed agent histories; intuitively, some aggressive agents may tailgate lead vehicles, while others may not. To model such phenomena, BehaviorNet predicts parameters of an agent's motion controller rather than predicting its spacetime trajectory (as most forecasters do). Finally, we present AdaptiveDriver, a model-predictive control (MPC) based planner that unrolls different world models conditioned on BehaviorNet's predictions. Our extensive experiments demonstrate that AdaptiveDriver achieves state-of-the-art results on the nuPlan closed-loop planning benchmark, reducing test error from 6.4% to 4.6%, even when applied to never-before-seen cities.
6/18/2024