Real-time Motion Planning for autonomous vehicles in dynamic environments
2406.02916
0
0

Abstract
Recent advancements in self-driving car technologies have enabled them to navigate autonomously through various environments. However, one of the critical challenges in autonomous vehicle operation is trajectory planning, especially in dynamic environments with moving obstacles. This research aims to tackle this challenge by proposing a robust algorithm tailored for autonomous cars operating in dynamic environments with moving obstacles. The algorithm introduces two main innovations. Firstly, it defines path density by adjusting the number of waypoints along the trajectory, optimizing their distribution for accuracy in curved areas and reducing computational complexity in straight sections. Secondly, it integrates hierarchical motion planning algorithms, combining global planning with an enhanced $A^*$ graph-based method and local planning using the time elastic band algorithm with moving obstacle detection considering different motion models. The proposed algorithm is adaptable for different vehicle types and mobile robots, making it versatile for real-world applications. Simulation results demonstrate its effectiveness across various conditions, promising safer and more efficient navigation for autonomous vehicles in dynamic environments. These modifications significantly improve trajectory planning capabilities, addressing a crucial aspect of autonomous vehicle technology.
Create account to get full access
Overview
- This paper presents a real-time motion planning system for autonomous vehicles navigating dynamic environments.
- The system combines global and local planning to generate collision-free trajectories that adapt to changing conditions.
- Key techniques include the Timed Elastic Band (TEB) for local planning and a novel approach to handling dense, dynamic obstacles.
Plain English Explanation
The research paper describes a method for autonomous vehicles to plan their movements in real-time as they navigate through complex, changing environments. This is an important problem, as self-driving cars need to be able to quickly react to obstacles and other vehicles on the road.
The system uses a combination of global planning to determine the overall route, and local planning to adjust the vehicle's trajectory moment-by-moment. This allows the car to plan a path that avoids collisions, while also accounting for the dynamic nature of the surroundings, such as other moving vehicles and pedestrians.
A key part of the local planning is the Timed Elastic Band (TEB) algorithm, which can quickly generate smooth, obstacle-avoiding paths. The researchers also developed a novel approach to handling dense, cluttered environments with many moving objects, which is a common challenge in real-world driving scenarios.
Overall, this work aims to make autonomous vehicles more capable of navigating busy, unpredictable roads safely and efficiently.
Technical Explanation
The proposed system combines global planning and local planning to generate collision-free trajectories for autonomous vehicles in dynamic environments.
For local planning, the system uses the Timed Elastic Band (TEB) approach, which models the vehicle's trajectory as a deformable band that can adapt to obstacles. TEB optimizes this band in real-time to find a smooth, collision-free path.
To handle dense, dynamic obstacle scenarios, the researchers introduced a "trajectory density" concept. This allows the system to identify areas with high obstacle density and adaptively adjust the planning strategy, such as by reducing the vehicle's speed or searching for alternative paths.
The system was evaluated through simulations and real-world experiments, demonstrating its ability to navigate complex, changing environments while ensuring safe, efficient vehicle motion.
Critical Analysis
The paper provides a comprehensive solution for real-time motion planning in dynamic environments, addressing key challenges such as collision avoidance and adapting to unpredictable obstacles.
However, the authors acknowledge that their approach may not perform as well in extremely dense or chaotic environments, where the trajectory density metric could become less reliable. Further research may be needed to enhance the system's robustness in such extreme scenarios.
Additionally, the paper does not discuss the potential impact of sensor failures or inaccuracies, which could affect the vehicle's perception of its surroundings and the planning process. Exploring how the system would handle such situations could provide valuable insights.
Overall, the research presents a promising approach that could contribute to the development of more capable and reliable autonomous driving systems. Continued refinement and testing in diverse real-world conditions would be valuable to further validate and improve the proposed techniques.
Conclusion
This paper outlines a real-time motion planning system for autonomous vehicles that combines global and local planning strategies to navigate dynamic environments. The key innovations include the Timed Elastic Band for local planning and a novel approach to handling dense, cluttered obstacle scenarios.
The proposed system demonstrates the ability to generate collision-free trajectories that adapt to changing conditions, which is a critical requirement for the safe deployment of self-driving cars. While the research shows promising results, further exploration of edge cases and sensor reliability could help strengthen the system's overall robustness and reliability.
Overall, this work represents an important step forward in the development of autonomous vehicle technology, with the potential to improve the safety and efficiency of transportation systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
0
0
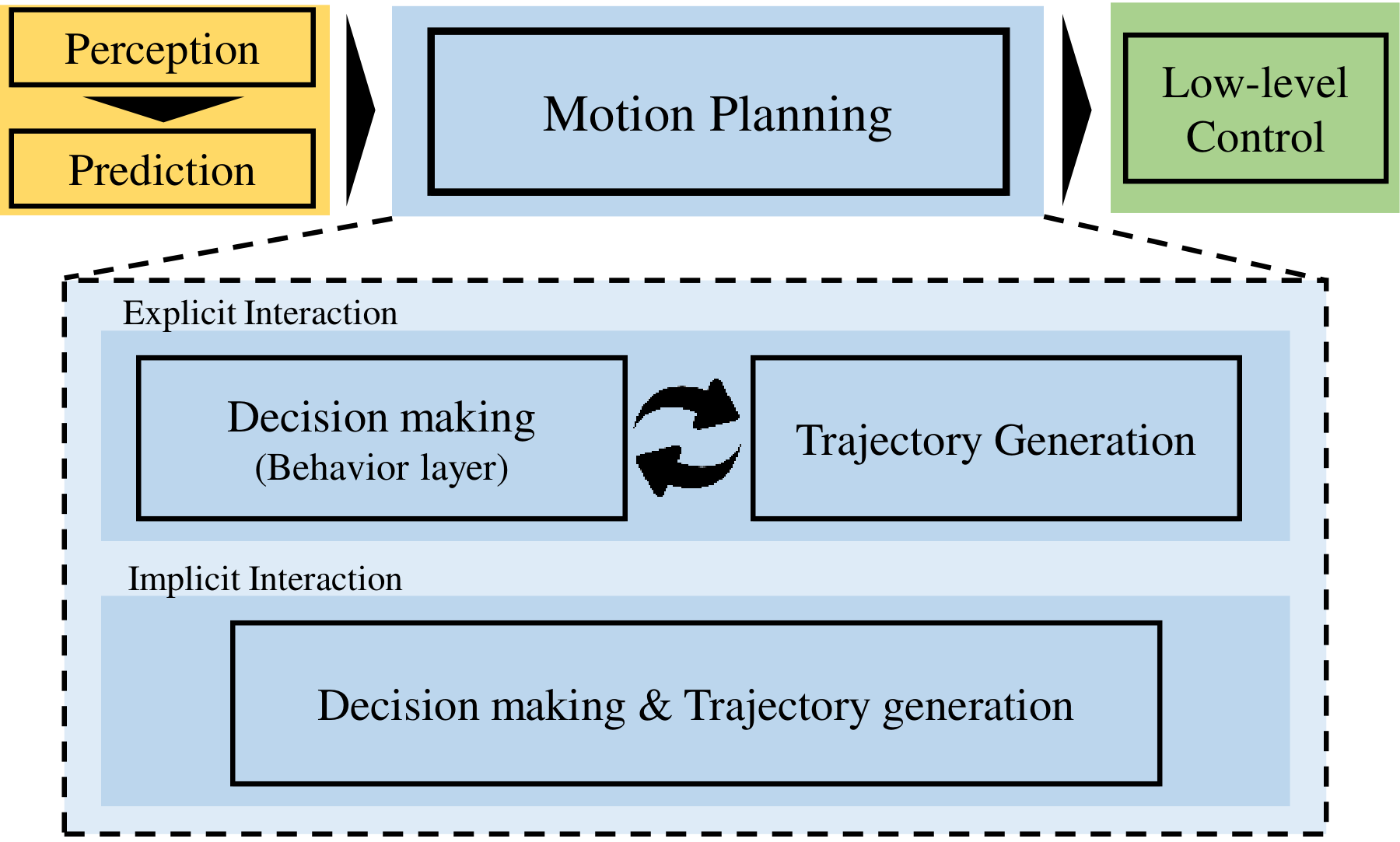
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
6/11/2024
💬
DREAM: Decentralized Real-time Asynchronous Probabilistic Trajectory Planning for Collision-free Multi-Robot Navigation in Cluttered Environments
Bask{i}n c{S}enbac{s}lar, Gaurav S. Sukhatme
0
0
Collision-free navigation in cluttered environments with static and dynamic obstacles is essential for many multi-robot tasks. Dynamic obstacles may also be interactive, i.e., their behavior varies based on the behavior of other entities. We propose a novel representation for interactive behavior of dynamic obstacles and a decentralized real-time multi-robot trajectory planning algorithm allowing inter-robot collision avoidance as well as static and dynamic obstacle avoidance. Our planner simulates the behavior of dynamic obstacles, accounting for interactivity. We account for the perception inaccuracy of static and prediction inaccuracy of dynamic obstacles. We handle asynchronous planning between teammates and message delays, drops, and re-orderings. We evaluate our algorithm in simulations using 25400 random cases and compare it against three state-of-the-art baselines using 2100 random cases. Our algorithm achieves up to 1.68x success rate using as low as 0.28x time in single-robot, and up to 2.15x success rate using as low as 0.36x time in multi-robot cases compared to the best baseline. We implement our planner on real quadrotors to show its real-world applicability.
5/21/2024

Interactive-FAR:Interactive, Fast and Adaptable Routing for Navigation Among Movable Obstacles in Complex Unknown Environments
Botao He, Guofei Chen, Wenshan Wang, Ji Zhang, Cornelia Fermuller, Yiannis Aloimonos
0
0
This paper introduces a real-time algorithm for navigating complex unknown environments cluttered with movable obstacles. Our algorithm achieves fast, adaptable routing by actively attempting to manipulate obstacles during path planning and adjusting the global plan from sensor feedback. The main contributions include an improved dynamic Directed Visibility Graph (DV-graph) for rapid global path searching, a real-time interaction planning method that adapts online from new sensory perceptions, and a comprehensive framework designed for interactive navigation in complex unknown or partially known environments. Our algorithm is capable of replanning the global path in several milliseconds. It can also attempt to move obstacles, update their affordances, and adapt strategies accordingly. Extensive experiments validate that our algorithm reduces the travel time by 33%, achieves up to 49% higher path efficiency, and runs faster than traditional methods by orders of magnitude in complex environments. It has been demonstrated to be the most efficient solution in terms of speed and efficiency for interactive navigation in environments of such complexity. We also open-source our code in the docker demo to facilitate future research.
4/12/2024
Trajectory Planning for Autonomous Driving in Unstructured Scenarios Based on Graph Neural Network and Numerical Optimization
Sumin Zhang, Kuo Li, Rui He, Zhiwei Meng, Yupeng Chang, Xiaosong Jin, Ri Bai
0
0
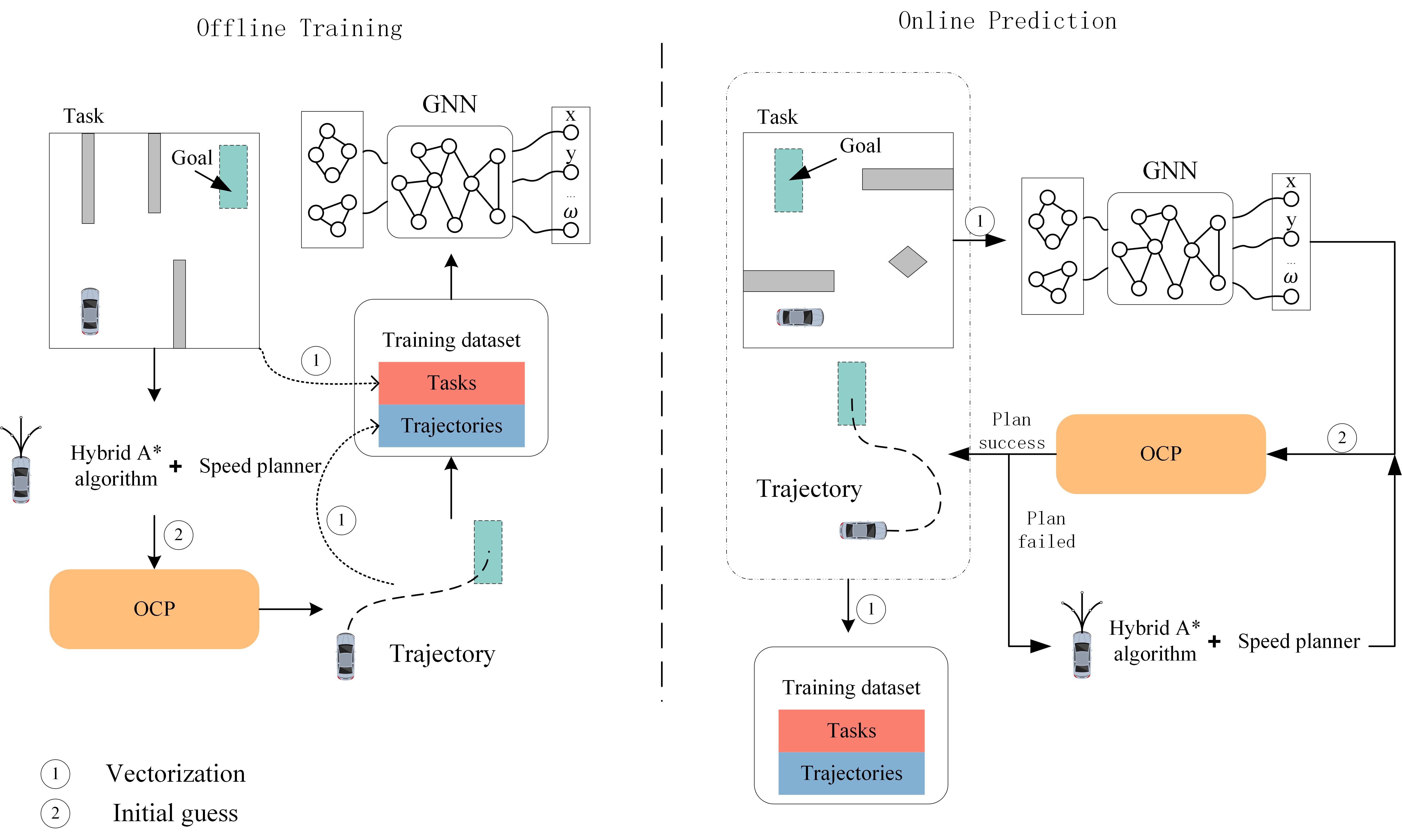
In unstructured environments, obstacles are diverse and lack lane markings, making trajectory planning for intelligent vehicles a challenging task. Traditional trajectory planning methods typically involve multiple stages, including path planning, speed planning, and trajectory optimization. These methods require the manual design of numerous parameters for each stage, resulting in significant workload and computational burden. While end-to-end trajectory planning methods are simple and efficient, they often fail to ensure that the trajectory meets vehicle dynamics and obstacle avoidance constraints in unstructured scenarios. Therefore, this paper proposes a novel trajectory planning method based on Graph Neural Networks (GNN) and numerical optimization. The proposed method consists of two stages: (1) initial trajectory prediction using the GNN, (2) trajectory optimization using numerical optimization. First, the graph neural network processes the environment information and predicts a rough trajectory, replacing traditional path and speed planning. This predicted trajectory serves as the initial solution for the numerical optimization stage, which optimizes the trajectory to ensure compliance with vehicle dynamics and obstacle avoidance constraints. We conducted simulation experiments to validate the feasibility of the proposed algorithm and compared it with other mainstream planning algorithms. The results demonstrate that the proposed method simplifies the trajectory planning process and significantly improves planning efficiency.
6/14/2024