Fully Geometric Panoramic Localization
2403.19904
0
0
Abstract
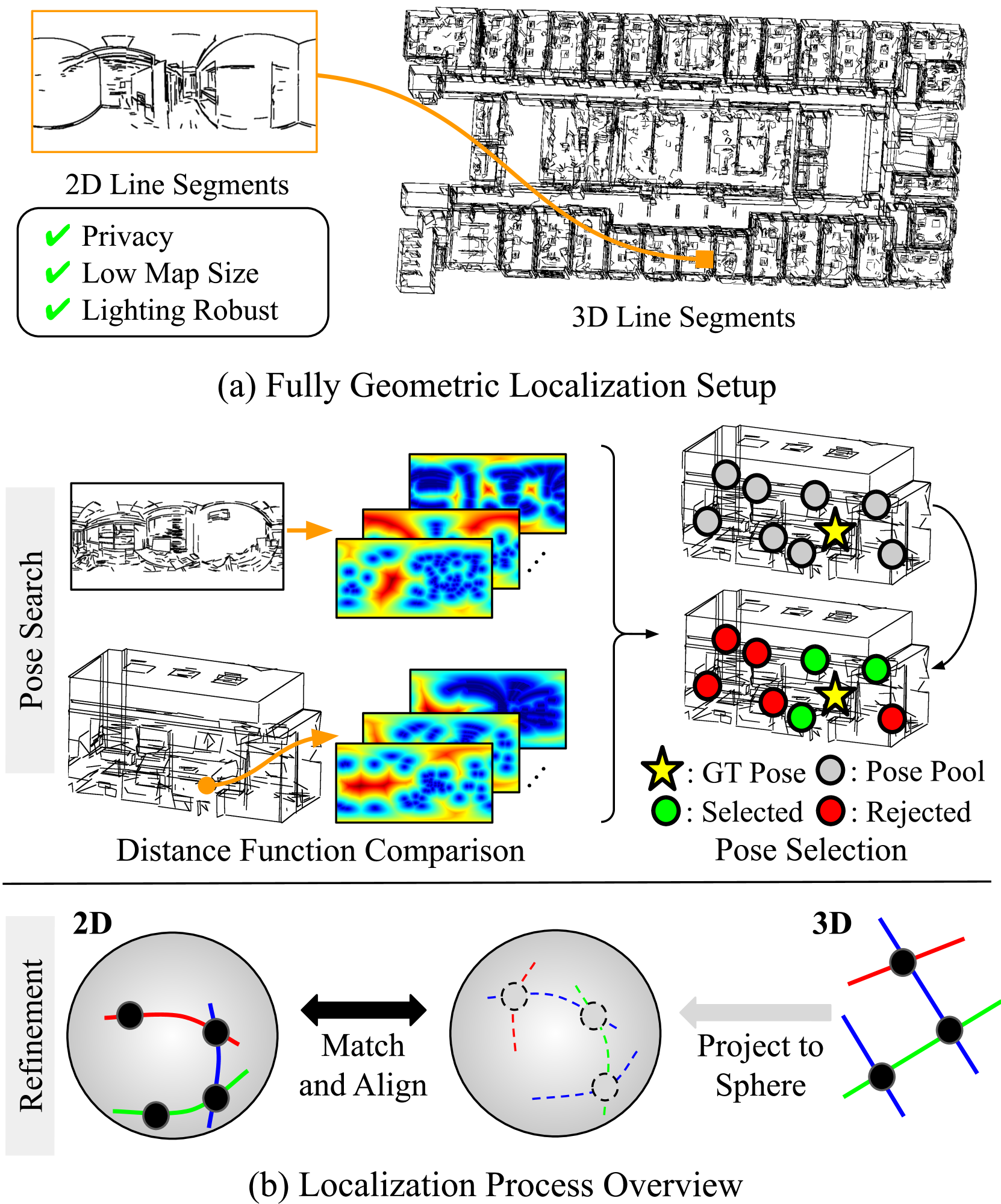
We introduce a lightweight and accurate localization method that only utilizes the geometry of 2D-3D lines. Given a pre-captured 3D map, our approach localizes a panorama image, taking advantage of the holistic 360 view. The system mitigates potential privacy breaches or domain discrepancies by avoiding trained or hand-crafted visual descriptors. However, as lines alone can be ambiguous, we express distinctive yet compact spatial contexts from relationships between lines, namely the dominant directions of parallel lines and the intersection between non-parallel lines. The resulting representations are efficient in processing time and memory compared to conventional visual descriptor-based methods. Given the groups of dominant line directions and their intersections, we accelerate the search process to test thousands of pose candidates in less than a millisecond without sacrificing accuracy. We empirically show that the proposed 2D-3D matching can localize panoramas for challenging scenes with similar structures, dramatic domain shifts or illumination changes. Our fully geometric approach does not involve extensive parameter tuning or neural network training, making it a practical algorithm that can be readily deployed in the real world. Project page including the code is available through this link: https://82magnolia.github.io/fgpl/.
Get summaries of the top AI research delivered straight to your inbox:
Overview
• This research paper presents a new approach for panoramic localization that fully leverages geometric information from 360-degree camera images.
• The proposed method uses line segments detected in panoramic views to accurately match with a prebuilt 3D map, enabling robust localization.
• The authors demonstrate significant improvements in localization accuracy and robustness compared to prior approaches that rely more heavily on visual appearance features.
Plain English Explanation
Imagine you're trying to find your location using a 360-degree camera on your device. Traditional methods would mainly look at the visual appearance of the surroundings, like the colors and textures. But this new approach instead focuses on the geometric shapes, like the lines and edges, that it can detect in the 360-degree image.
By matching these geometric line features to a pre-made 3D map of the environment, the system can accurately pinpoint your location, even if the visual appearance has changed over time due to things like lighting or weather conditions. This makes the localization much more robust and reliable compared to approaches that only use visual appearance.
The key insight is that the underlying geometry of a space tends to be more stable and distinctive than just what it looks like on the surface. So by harnessing this geometric information, the system can localize you precisely, even in challenging conditions where appearance-based methods might struggle.
Technical Explanation
The paper introduces a novel panoramic localization approach that relies primarily on geometric line features extracted from 360-degree camera images. The authors build a 3D map of the environment during an offline mapping phase, representing it as a graph of interconnected line segments.
During online localization, the system detects line segments in the current panoramic view and matches them to the pre-built 3D map using a robust geometric correspondence estimation algorithm. This allows it to accurately estimate the 6-DoF camera pose (position and orientation) relative to the map.
The authors demonstrate the effectiveness of their approach through extensive experiments on both synthetic and real-world datasets. Compared to state-of-the-art methods that leverage more appearance-based features, their fully geometric approach achieves significantly higher localization accuracy and robustness, especially in challenging conditions with illumination changes or dynamic occlusions.
Critical Analysis
The paper provides a strong technical contribution by showing how a geometric line-based representation can outperform traditional appearance-based approaches for panoramic localization. The authors acknowledge that their method requires an offline 3D mapping stage, which could be a limitation in some real-world applications.
Additionally, the paper does not address how the system would handle large-scale changes to the environment, such as major construction or renovation projects that alter the underlying geometry. Further research may be needed to understand the robustness of the approach to such significant environmental changes.
While the authors demonstrate impressive results, it would be valuable to see an analysis of failure cases and potential avenues for improvement. Exploring hybrid approaches that combine geometric and appearance-based cues could also be an interesting direction for future work.
Conclusion
This research presents a novel panoramic localization method that leverages the stability and distinctiveness of geometric line features, rather than relying primarily on visual appearance. By accurately matching these line segments to a pre-built 3D map, the system can achieve robust and high-precision localization, outperforming previous techniques.
The findings highlight the importance of considering the underlying geometry of an environment, rather than just its surface-level visual characteristics, for tasks like indoor or urban localization. As cameras and sensors continue to become more ubiquitous, this work demonstrates the potential for geometric-centric approaches to enable reliable positioning and navigation in complex real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
SPVLoc: Semantic Panoramic Viewport Matching for 6D Camera Localization in Unseen Environments
Niklas Gard, Anna Hilsmann, Peter Eisert
0
0
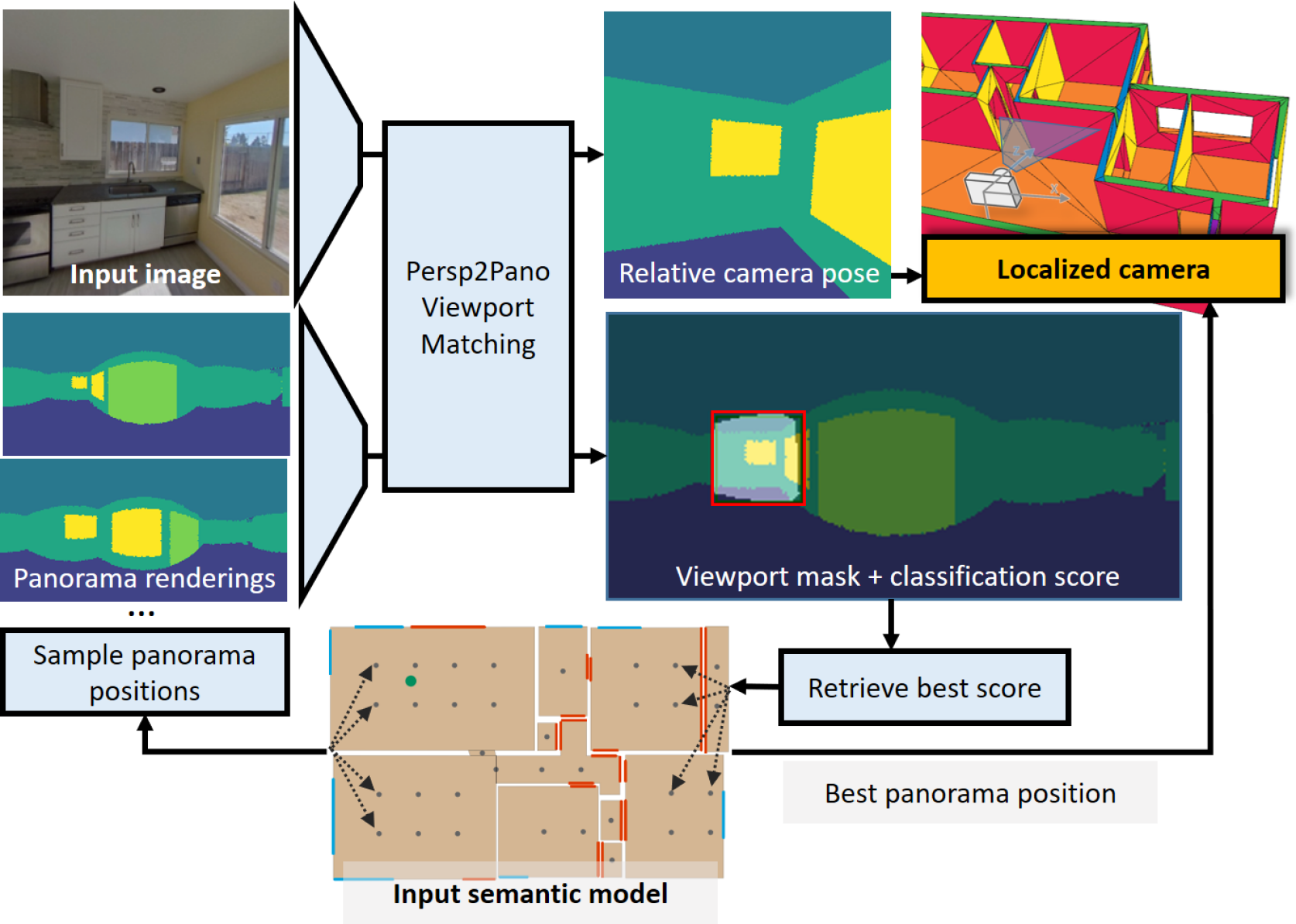
In this paper, we present SPVLoc, a global indoor localization method that accurately determines the six-dimensional (6D) camera pose of a query image and requires minimal scene-specific prior knowledge and no scene-specific training. Our approach employs a novel matching procedure to localize the perspective camera's viewport, given as an RGB image, within a set of panoramic semantic layout representations of the indoor environment. The panoramas are rendered from an untextured 3D reference model, which only comprises approximate structural information about room shapes, along with door and window annotations. We demonstrate that a straightforward convolutional network structure can successfully achieve image-to-panorama and ultimately image-to-model matching. Through a viewport classification score, we rank reference panoramas and select the best match for the query image. Then, a 6D relative pose is estimated between the chosen panorama and query image. Our experiments demonstrate that this approach not only efficiently bridges the domain gap but also generalizes well to previously unseen scenes that are not part of the training data. Moreover, it achieves superior localization accuracy compared to the state of the art methods and also estimates more degrees of freedom of the camera pose. We will make our source code publicly available at https://github.com/fraunhoferhhi/spvloc .
4/17/2024
Hierarchical localization with panoramic views and triplet loss functions
Marcos Alfaro, Juan Jos'e Cabrera, Luis Miguel Jim'enez, 'Oscar Reinoso, Luis Pay'a
0
0
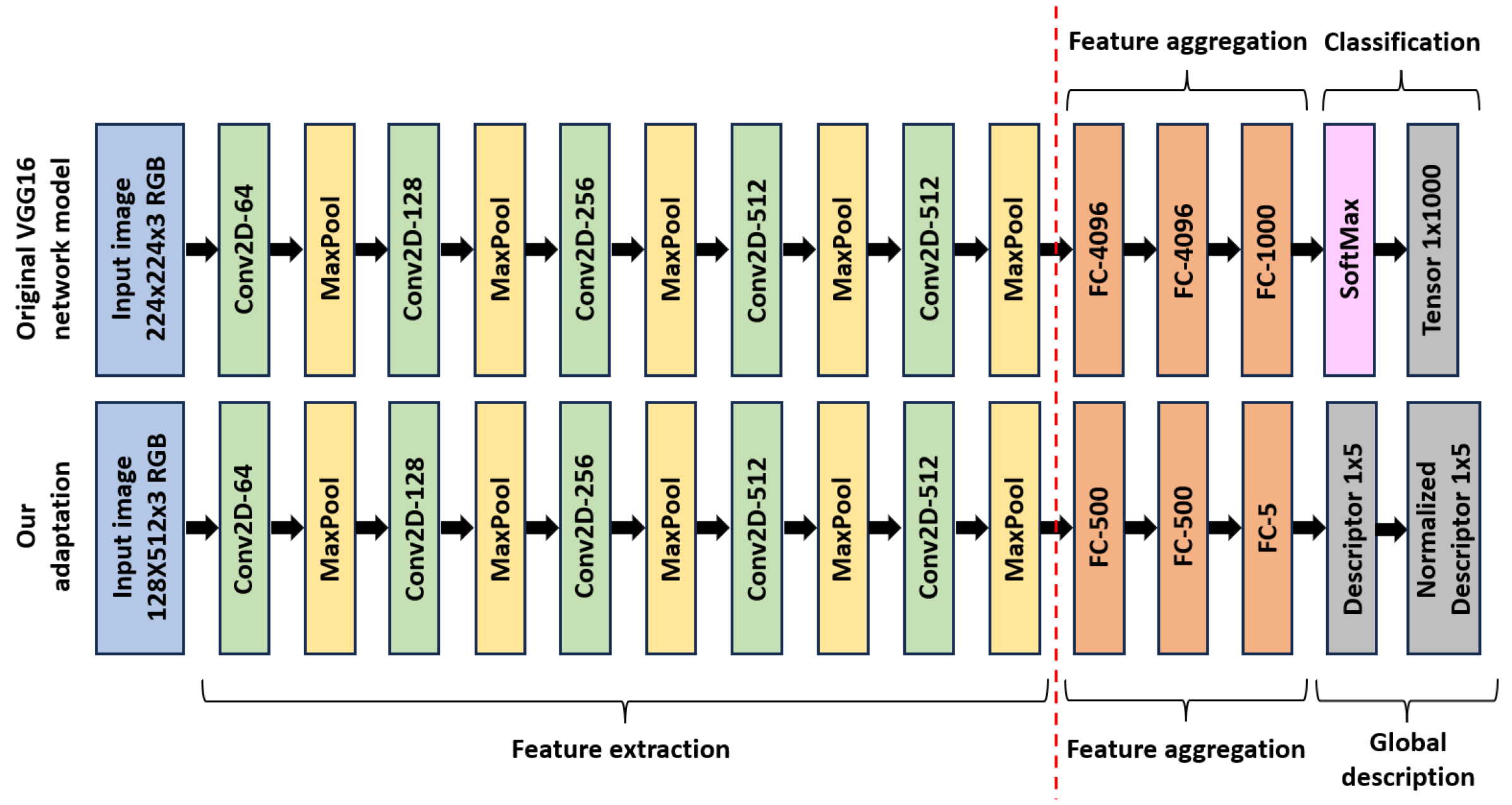
The main objective of this paper is to address the mobile robot localization problem with Triplet Convolutional Neural Networks and test their robustness against changes of the lighting conditions. We have used omnidirectional images from real indoor environments captured in dynamic conditions that have been converted to panoramic format. Two approaches are proposed to address localization by means of triplet neural networks. First, hierarchical localization, which consists in estimating the robot position in two stages: a coarse localization, which involves a room retrieval task, and a fine localization is addressed by means of image retrieval in the previously selected room. Second, global localization, which consists in estimating the position of the robot inside the entire map in a unique step. Besides, an exhaustive study of the loss function influence on the network learning process has been made. The experimental section proves that triplet neural networks are an efficient and robust tool to address the localization of mobile robots in indoor environments, considering real operation conditions.
4/23/2024
DreamScene360: Unconstrained Text-to-3D Scene Generation with Panoramic Gaussian Splatting
Shijie Zhou, Zhiwen Fan, Dejia Xu, Haoran Chang, Pradyumna Chari, Tejas Bharadwaj, Suya You, Zhangyang Wang, Achuta Kadambi
0
0
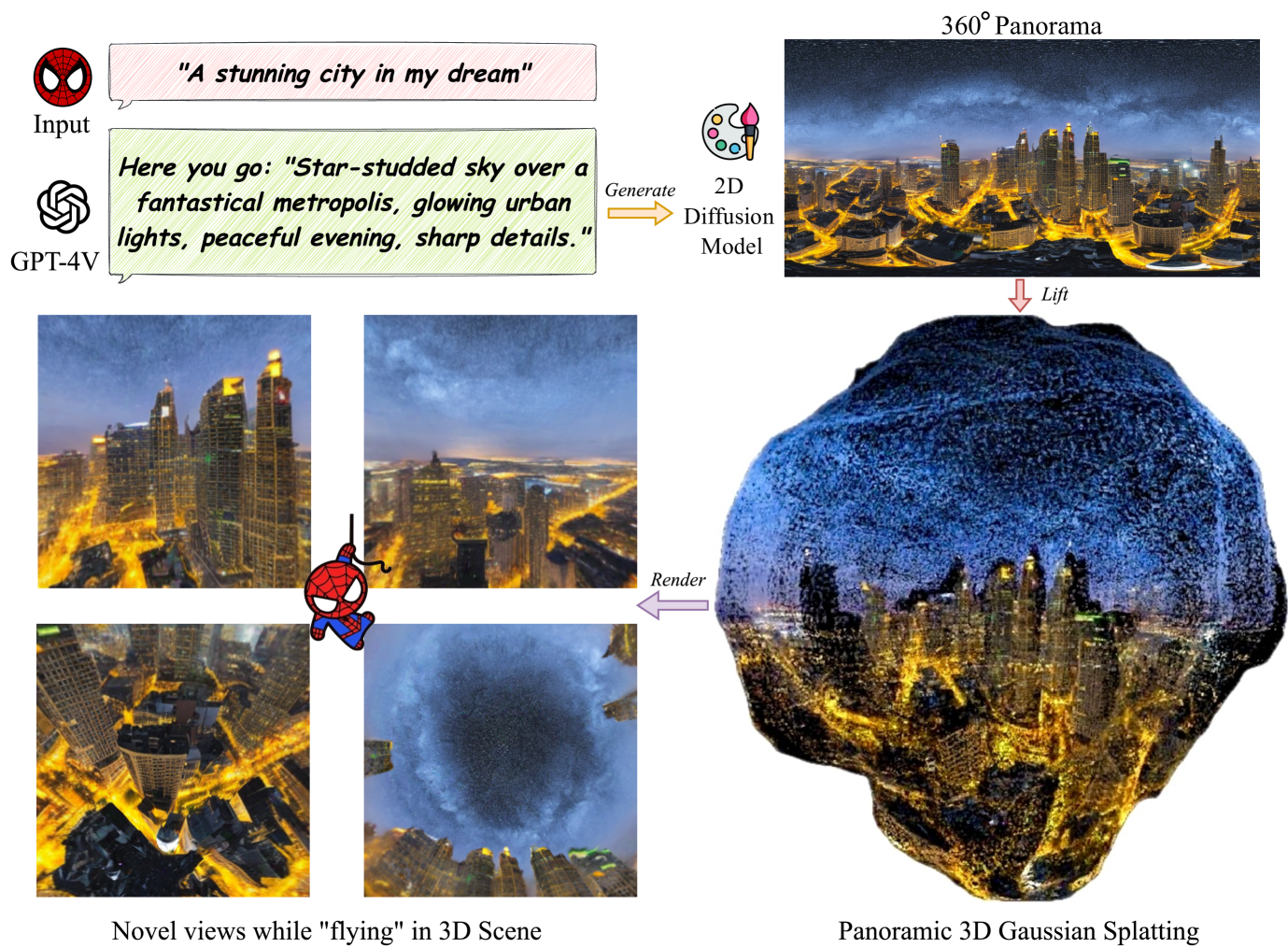
The increasing demand for virtual reality applications has highlighted the significance of crafting immersive 3D assets. We present a text-to-3D 360$^{circ}$ scene generation pipeline that facilitates the creation of comprehensive 360$^{circ}$ scenes for in-the-wild environments in a matter of minutes. Our approach utilizes the generative power of a 2D diffusion model and prompt self-refinement to create a high-quality and globally coherent panoramic image. This image acts as a preliminary flat (2D) scene representation. Subsequently, it is lifted into 3D Gaussians, employing splatting techniques to enable real-time exploration. To produce consistent 3D geometry, our pipeline constructs a spatially coherent structure by aligning the 2D monocular depth into a globally optimized point cloud. This point cloud serves as the initial state for the centroids of 3D Gaussians. In order to address invisible issues inherent in single-view inputs, we impose semantic and geometric constraints on both synthesized and input camera views as regularizations. These guide the optimization of Gaussians, aiding in the reconstruction of unseen regions. In summary, our method offers a globally consistent 3D scene within a 360$^{circ}$ perspective, providing an enhanced immersive experience over existing techniques. Project website at: http://dreamscene360.github.io/
4/11/2024
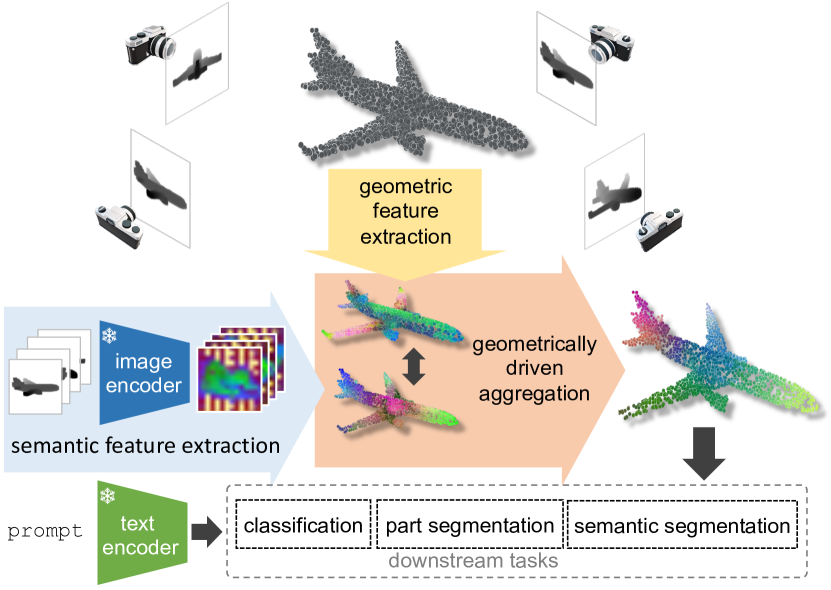
Geometrically-driven Aggregation for Zero-shot 3D Point Cloud Understanding
Guofeng Mei, Luigi Riz, Yiming Wang, Fabio Poiesi
0
0
Zero-shot 3D point cloud understanding can be achieved via 2D Vision-Language Models (VLMs). Existing strategies directly map Vision-Language Models from 2D pixels of rendered or captured views to 3D points, overlooking the inherent and expressible point cloud geometric structure. Geometrically similar or close regions can be exploited for bolstering point cloud understanding as they are likely to share semantic information. To this end, we introduce the first training-free aggregation technique that leverages the point cloud's 3D geometric structure to improve the quality of the transferred Vision-Language Models. Our approach operates iteratively, performing local-to-global aggregation based on geometric and semantic point-level reasoning. We benchmark our approach on three downstream tasks, including classification, part segmentation, and semantic segmentation, with a variety of datasets representing both synthetic/real-world, and indoor/outdoor scenarios. Our approach achieves new state-of-the-art results in all benchmarks. Our approach operates iteratively, performing local-to-global aggregation based on geometric and semantic point-level reasoning. Code and dataset are available at https://luigiriz.github.io/geoze-website/
4/16/2024