Gathering Semi-Synchronously Scheduled Two-State Robots

0

Sign in to get full access
Overview
- The paper focuses on the problem of gathering semi-synchronously scheduled two-state robots.
- The research is supported by JSPS KAKENHI Grant Numbers 20K11685 and 21K11748.
- The paper aims to provide insights into the gathering problem for semi-synchronous robots.
Plain English Explanation
The paper discusses the challenge of getting a group of robots to gather together in the same location. These robots can be in one of two states - either "active" or "inactive" - and they operate on a semi-synchronous schedule. This means that the robots don't all move at exactly the same time, but they do coordinate their movements to some degree.
The researchers wanted to understand how these semi-synchronous, two-state robots could be effectively gathered together in a single location. This is an important problem in robotics, as it has applications in areas like search and rescue operations, environmental monitoring, and cooperative task completion.
By analyzing the behavior of these semi-synchronous robots, the researchers were able to develop strategies and algorithms that could guide the robots to a common gathering point. This involved considering factors like the robots' communication abilities, their movement patterns, and the initial distribution of the robots in the environment.
Technical Explanation
The paper presents a formal model for the problem of gathering semi-synchronously scheduled two-state robots. The robots can be in either an "active" or "inactive" state, and their transitions between these states are governed by a semi-synchronous schedule.
The researchers designed experiments to study the behavior of these robots under various conditions, such as different initial robot distributions and different communication capabilities. They developed algorithms and strategies to guide the robots to a common gathering point, taking into account factors like the robots' communication radius and the time required for them to transition between active and inactive states.
Through their analysis, the researchers were able to derive insights into the fundamental challenges and limitations of the gathering problem for semi-synchronous robots. They also proposed potential solutions and identified areas for further research, such as exploring more complex robot behaviors or considering the effects of environmental obstacles on the gathering process.
Critical Analysis
The paper provides a thorough and rigorous analysis of the gathering problem for semi-synchronous, two-state robots. The researchers have carefully designed their experiments and models to capture the relevant aspects of the problem, and their proposed solutions seem well-grounded in the underlying theory.
One potential limitation of the research is that it focuses on a relatively simple robot model, with only two possible states and a semi-synchronous schedule. In real-world applications, robots may have more complex behaviors and operating conditions, which could introduce additional challenges and require further investigation.
Additionally, the paper does not address potential issues related to scalability, such as how the proposed solutions would perform with larger numbers of robots or in more complex environments. Further research may be needed to understand the practical applicability of the findings in larger-scale scenarios.
Overall, the paper makes a valuable contribution to the field of multi-robot coordination and provides a solid foundation for future work in this area. The researchers' attention to detail and their efforts to uncover the fundamental principles of the gathering problem are commendable.
Conclusion
This paper offers important insights into the challenge of gathering semi-synchronously scheduled two-state robots. The researchers have developed a formal model and experimental framework to study this problem, and their findings provide valuable guidance for designing effective coordination strategies for these types of multi-robot systems.
The proposed solutions have the potential to be applied in a variety of real-world scenarios, such as search and rescue operations, environmental monitoring, and cooperative task completion. By understanding the limitations and challenges of the gathering problem for semi-synchronous robots, researchers and practitioners can work towards developing more robust and reliable multi-robot systems that can operate in complex, dynamic environments.
Future research in this area could explore more sophisticated robot behaviors, consider the effects of environmental factors, and investigate scalability issues to further advance the state of the art in multi-robot coordination.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gathering Semi-Synchronously Scheduled Two-State Robots
Kohei Otaka, Fabian Frei, Koichi Wada
We study the problem emph{Gathering} for $n$ autonomous mobile robots in synchronous settings with a persistent memory called emph{light}. It is well known that Gathering is impossible in the basic model ($OBLOT$) where robots have no lights, even if the system is semi-synchronous (called SSYNCH). Gathering becomes possible, however, if each robot has a light of some type that can be set to a constant number of colors. In the $FCOM$ model, the robots can only see the lights of other robots. In the $FSTA$ model, each robot can only observe its own light. In the $LUMI$ model, all robots can see all lights. This paper focuses on $FSTA$ robots with 2-colored lights in synchronous settings. We show that 2-color $FSTA$ and $FCOM$ robots cannot solve Gathering in SSYNCH without additional conditions, even with rigid movement and agreement of chirality and the minimum moving distance. We also improve the condition of the previous gathering algorithm for $FSTA$ robots with 2-color working in SSYNCH.
Read more8/20/2024
🏅
0
Optimal Uniform Circle Formation by Asynchronous Luminous Robots
Caterina Feletti, Debasish Pattanayak, Gokarna Sharma
We study the {sc Uniform Circle Formation} ({sc UCF}) problem for a swarm of $n$ autonomous mobile robots operating in emph{Look-Compute-Move} (LCM) cycles on the Euclidean plane. We assume our robots are emph{luminous}, i.e. embedded with a persistent light that can assume a color chosen from a fixed palette, and emph{opaque}, i.e. not able to see beyond a collinear robot. Robots are said to emph{collide} if they share positions or their paths intersect within concurrent LCM cycles. To solve {sc UCF}, a swarm of $n$ robots must autonomously arrange themselves so that each robot occupies a vertex of the same regular $n$-gon not fixed in advance. In terms of efficiency, the goal is to design an algorithm that optimizes (or provides a tradeoff between) two fundamental performance metrics: emph{(i)} the execution time and emph{(ii)} the size of the color palette. There exists an $O(1)$-time $O(1)$-color algorithm for this problem under the fully synchronous and semi-synchronous schedulers and a $O(loglog n)$-time $O(1)$-color or $O(1)$-time $O(sqrt{n})$-color algorithm under the asynchronous scheduler, avoiding collisions. In this paper, we develop a deterministic algorithm solving {sc UCF} avoiding collisions in $O(1)$-time with $O(1)$ colors under the asynchronous scheduler, which is asymptotically optimal with respect to both time and number of colors used, the first such result. Furthermore, the algorithm proposed here minimizes for the first time what we call the emph{computational SEC}, i.e. the smallest circular area where robots operate throughout the whole algorithm.
Read more5/13/2024
0
Computational Power of Mobile Robots in Synchronous Environment: Discrete Version
Avisek Sharma, Pritam Goswami, Buddhadeb Sau
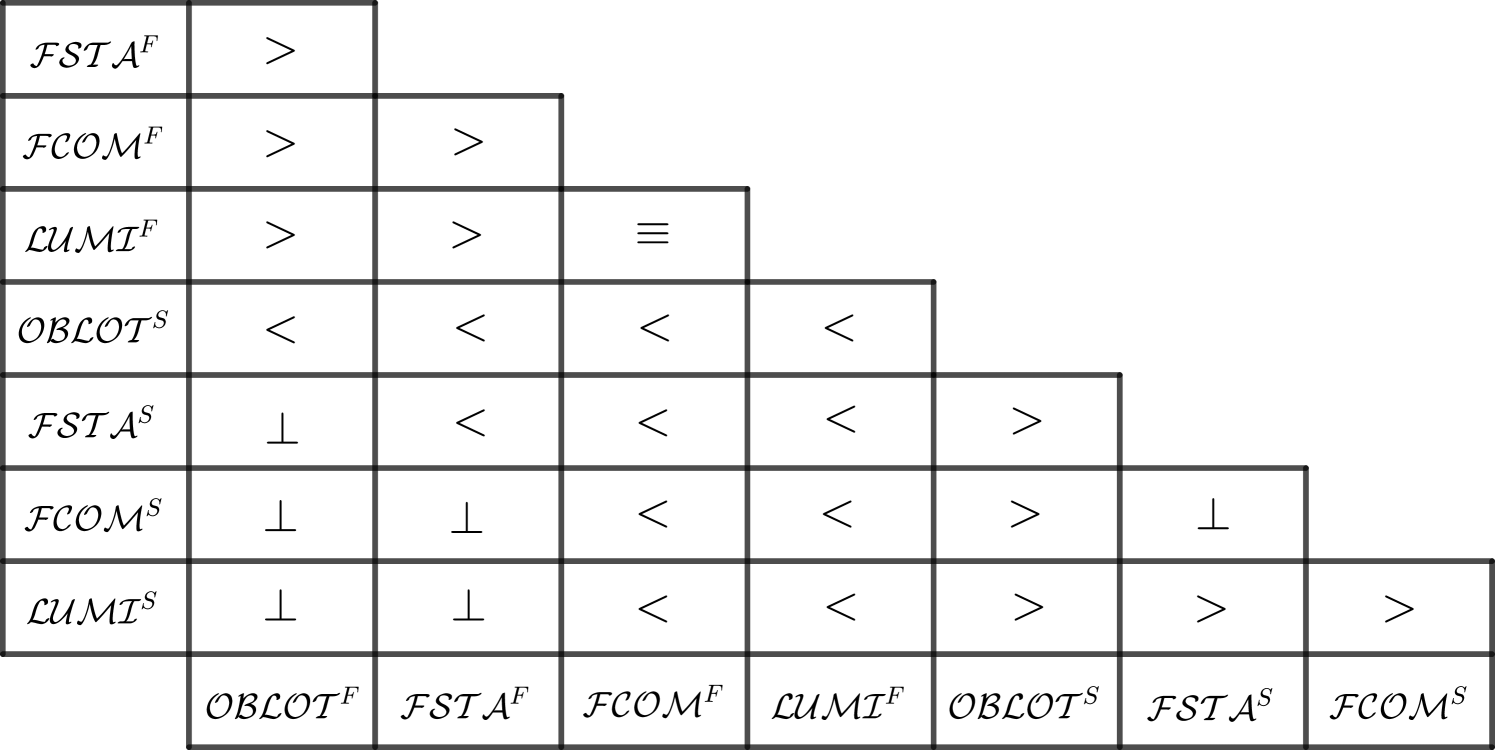
In distributed computing by mobile robots, robots are deployed over a region, continuous or discrete, operating through a sequence of textit{look-compute-move} cycles. An extensive study has been carried out to understand the computational powers of different robot models. The models vary on the ability to 1)~remember constant size information and 2)~communicate constant size message. Depending on the abilities the different models are 1)~$mathcal{OBLOT}$ (robots are oblivious and silent), 2)~$mathcal{FSTA}$ (robots have finite states but silent), 3)~$mathcal{FCOM}$ (robots are oblivious but can communicate constant size information) and, 4)~$mathcal{LUMI}$ (robots have finite states and can communicate constant size information). Another factor that affects computational ability is the scheduler that decides the activation time of the robots. The main three schedulers are textit{fully-synchronous}, textit{semi-synchronous} and textit{asynchronous}. Combining the models ($M$) with schedulers ($K$), we have twelve combinations $M^K$. In the euclidean domain, the comparisons between these twelve variants have been done in different works for transparent robots, opaque robots, and robots with limited visibility. There is a vacant space for similar works when robots are operating on discrete regions like networks. It demands separate research attention because there have been a series of works where robots operate on different networks, and there is a fundamental difference when robots are operating on a continuous domain versus a discrete domain in terms of robots' movement. This work contributes to filling the space by giving a full comparison table for all models with two synchronous schedulers: fully-synchronous and semi-synchronous.
Read more7/25/2024
🌿
0
Uniform Partitioning of a Bounded Region using Opaque ASYNC Luminous Mobile Robots
Subhajit Pramanick, Saswata Jana, Adri Bhattacharya, Partha Sarathi Mandal
We are given $N$ autonomous mobile robots inside a bounded region. The robots are opaque which means that three collinear robots are unable to see each other as one of the robots acts as an obstruction for the other two. They operate in classical emph{Look-Compute-Move} (LCM) activation cycles. Moreover, the robots are oblivious except for a persistent light (which is why they are called emph{Luminous robots}) that can determine a color from a fixed color set. Obliviousness does not allow the robots to remember any information from past activation cycles. The Uniform Partitioning problem requires the robots to partition the whole region into sub-regions of equal area, each of which contains exactly one robot. Due to application-oriented motivation, we, in this paper consider the region to be well-known geometric shapes such as rectangle, square and circle. We investigate the problem in emph{asynchronous} setting where there is no notion of common time and any robot gets activated at any time with a fair assumption that every robot needs to get activated infinitely often. To the best of our knowledge, this is the first attempt to study the Uniform Partitioning problem using oblivious opaque robots working under asynchronous settings. We propose three algorithms considering three different regions: rectangle, square and circle. The algorithms proposed for rectangular and square regions run in $O(N)$ epochs whereas the algorithm for circular regions runs in $O(N^2)$ epochs, where an epoch is the smallest unit of time in which all robots are activated at least once and execute their LCM cycles. The algorithms for the rectangular, square and circular regions require $2$ (which is optimal), $5$ and $8$ colors, respectively.
Read more5/2/2024