Computational Power of Mobile Robots in Synchronous Environment: Discrete Version

0
Sign in to get full access
Overview
- This paper explores the computational power of mobile robots operating in a synchronous environment, focusing on the discrete version of the problem.
- The research investigates the capabilities and limitations of mobile robots when performing tasks in a synchronized setting, where all robots move and act in a coordinated manner.
- The findings provide insights into the computational complexity and problem-solving abilities of mobile robot systems in a controlled, synchronous environment.
Plain English Explanation
The paper examines the computational abilities of mobile robots that work together in a synchronized way. In this setup, all the robots move and act at the same time, coordinating their actions. The researchers wanted to understand the capabilities and limitations of these robot systems when operating in a synchronous environment, where everything happens in a structured, step-by-step manner.
The key idea is to study the computational complexity of the problems that mobile robots can solve when they are working together in a synchronized way. This means looking at how difficult or easy it is for the robots to accomplish certain tasks, and what factors influence their problem-solving abilities.
By understanding the computational power of mobile robots in a synchronous setting, the research provides insights that could be useful for designing more effective and efficient robot systems for a variety of applications, such as link to "Intelligence-Motion Models for Continuum Robots: An Overview", link to "Continuous Execution of High-Level Collaborative Tasks with Heterogeneous Robots", or link to "Time Travel and Energy for Uniform Dispersion Problem".
Technical Explanation
The paper investigates the computational power of mobile robots operating in a synchronous environment, focusing on the discrete version of the problem. The researchers establish a formal model for the mobile robots, which includes parameters such as the number of robots, the size of the environment, and the robots' capabilities.
The key aspect of the model is the synchronous nature of the robot movement and actions. In each time step, all robots simultaneously sense their surroundings, make decisions, and execute their movements in a coordinated fashion. This synchronous operation is in contrast to asynchronous environments, where robots may act independently and at different times.
The paper explores the computational complexity of various tasks that the mobile robots can perform in this synchronous setting. The researchers analyze the time and space complexity of problems such as link to "Do We Run Large-Scale Multi-Robot?" and link to "Uniform Partitioning of a Bounded Region Using Opaque Async", providing insights into the fundamental limits and capabilities of mobile robot systems.
Critical Analysis
The paper provides a rigorous theoretical analysis of the computational power of mobile robots in a synchronous environment, but it does acknowledge some limitations. The discrete version of the problem studied may not fully capture the continuous nature of real-world robot movements and environments.
Additionally, the synchronous assumption, while simplifying the analysis, may not always be realistic, as robots in practical settings may experience asynchronous or partially synchronous behavior. The researchers suggest that extending the analysis to more general asynchronous models could be an important direction for future research.
While the paper focuses on the theoretical aspects, it does not delve deeply into the practical implications or implementation details of the proposed concepts. Bridging the gap between the theoretical findings and their application in real-world robot systems could be an area for further investigation.
Conclusion
This research paper offers valuable insights into the computational power of mobile robots operating in a synchronous environment. By establishing a formal model and analyzing the complexity of various tasks, the authors provide a deeper understanding of the fundamental capabilities and limitations of mobile robot systems.
The findings could inform the design and development of more efficient and effective robot algorithms and architectures, potentially enabling enhanced performance in a wide range of applications, from link to "Intelligence-Motion Models for Continuum Robots: An Overview" to link to "Continuous Execution of High-Level Collaborative Tasks with Heterogeneous Robots". The paper's theoretical insights lay the groundwork for further exploration and practical applications in the field of mobile robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Computational Power of Mobile Robots in Synchronous Environment: Discrete Version
Avisek Sharma, Pritam Goswami, Buddhadeb Sau
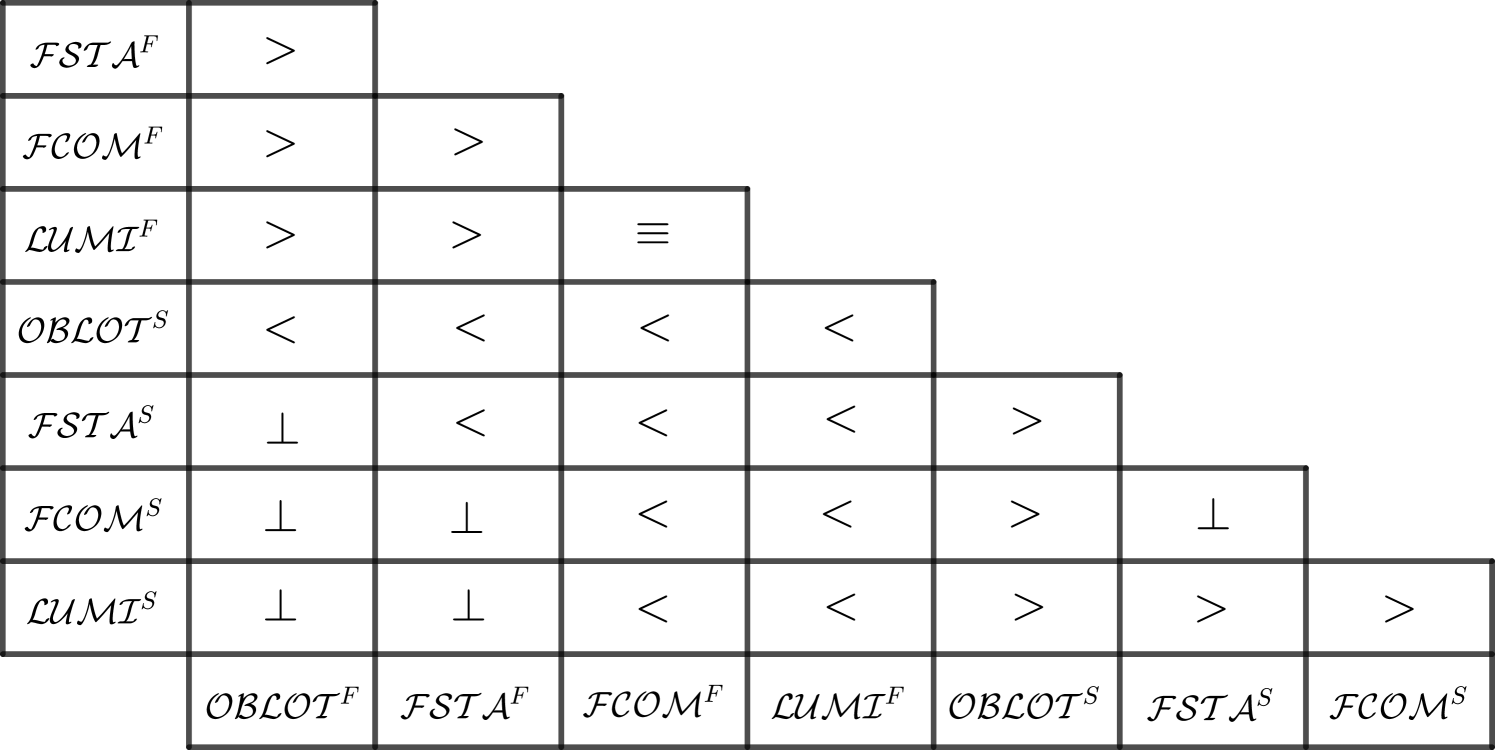
In distributed computing by mobile robots, robots are deployed over a region, continuous or discrete, operating through a sequence of textit{look-compute-move} cycles. An extensive study has been carried out to understand the computational powers of different robot models. The models vary on the ability to 1)~remember constant size information and 2)~communicate constant size message. Depending on the abilities the different models are 1)~$mathcal{OBLOT}$ (robots are oblivious and silent), 2)~$mathcal{FSTA}$ (robots have finite states but silent), 3)~$mathcal{FCOM}$ (robots are oblivious but can communicate constant size information) and, 4)~$mathcal{LUMI}$ (robots have finite states and can communicate constant size information). Another factor that affects computational ability is the scheduler that decides the activation time of the robots. The main three schedulers are textit{fully-synchronous}, textit{semi-synchronous} and textit{asynchronous}. Combining the models ($M$) with schedulers ($K$), we have twelve combinations $M^K$. In the euclidean domain, the comparisons between these twelve variants have been done in different works for transparent robots, opaque robots, and robots with limited visibility. There is a vacant space for similar works when robots are operating on discrete regions like networks. It demands separate research attention because there have been a series of works where robots operate on different networks, and there is a fundamental difference when robots are operating on a continuous domain versus a discrete domain in terms of robots' movement. This work contributes to filling the space by giving a full comparison table for all models with two synchronous schedulers: fully-synchronous and semi-synchronous.
Read more7/25/2024

0
Gathering Semi-Synchronously Scheduled Two-State Robots
Kohei Otaka, Fabian Frei, Koichi Wada
We study the problem emph{Gathering} for $n$ autonomous mobile robots in synchronous settings with a persistent memory called emph{light}. It is well known that Gathering is impossible in the basic model ($OBLOT$) where robots have no lights, even if the system is semi-synchronous (called SSYNCH). Gathering becomes possible, however, if each robot has a light of some type that can be set to a constant number of colors. In the $FCOM$ model, the robots can only see the lights of other robots. In the $FSTA$ model, each robot can only observe its own light. In the $LUMI$ model, all robots can see all lights. This paper focuses on $FSTA$ robots with 2-colored lights in synchronous settings. We show that 2-color $FSTA$ and $FCOM$ robots cannot solve Gathering in SSYNCH without additional conditions, even with rigid movement and agreement of chirality and the minimum moving distance. We also improve the condition of the previous gathering algorithm for $FSTA$ robots with 2-color working in SSYNCH.
Read more8/20/2024

0
Communication- and Computation-Efficient Distributed Decision-Making in Multi-Robot Networks
Zirui Xu, Sandilya Sai Garimella, Vasileios Tzoumas
We provide a distributed coordination paradigm that enables scalable and near-optimal joint motion planning among multiple robots. Our coordination paradigm contrasts with current paradigms that are either near-optimal but impractical for replanning times or real-time but offer no near-optimality guarantees. We are motivated by the future of collaborative mobile autonomy, where distributed teams of robots will coordinate via vehicle-to-vehicle (v2v) communication to execute information-heavy tasks like mapping, surveillance, and target tracking. To enable rapid distributed coordination, we must curtail the explosion of information-sharing across the network, thus limiting robot coordination. However, this can lead to suboptimal plans, causing overlapping trajectories instead of complementary ones. We make theoretical and algorithmic contributions to balance the trade-off between decision speed and optimality. We introduce tools for distributed submodular optimization, a diminishing returns property in information-gathering tasks. Theoretically, we analyze how local network topology affects near-optimality at the global level. Algorithmically, we provide a communication- and computation-efficient coordination algorithm for agents to balance the trade-off. Our algorithm is up to two orders faster than competitive near-optimal algorithms. In simulations of surveillance tasks with up to 45 robots, it enables real-time planning at the order of 1 Hz with superior coverage performance. To enable the simulations, we provide a high-fidelity simulator that extends AirSim by integrating a collaborative autonomy pipeline and simulating v2v communication delays.
Read more7/16/2024
🌐
0
Intelligence and Motion Models of Continuum Robots: an Overview
Oxana Shamilyan, Ievgen Kabin, Zoya Dyka, Oleksandr Sudakov, Andrii Cherninskyi, Marcin Brzozowski, Peter Langendoerfer
Many technical solutions are bio-inspired. Octopus-inspired robotic arms belong to continuum robots which are used in minimally invasive surgery or for technical system restoration in areas difficult-toaccess. Continuum robot missions are bounded with their motions, whereby the motion of the robots is controlled by humans via wireless communication. In case of a lost connection, robot autonomy is required. Distributed control and distributed decision-making mechanisms based on artificial intelligence approaches can be a promising solution to achieve autonomy of technical systems and to increase their resilience. However these methods are not well investigated yet. Octopuses are the living example of natural distributed intelligence but their learning and decision-making mechanisms are also not fully investigated and understood yet. Our major interest is investigating mechanisms of Distributed Artificial Intelligence as a basis for improving resilience of complex systems. We decided to use a physical continuum robot prototype that is able to perform some basic movements for our research. The idea is to research how a technical system can be empowered to combine movements into sequences of motions by itself. For the experimental investigations a suitable physical prototype has to be selected, its motion control has to be implemented and automated. In this paper, we give an overview combining different fields of research, such as Distributed Artificial Intelligence and continuum robots based on 98 publications. We provide a detailed description of the basic motion control models of continuum robots based on the literature reviewed, discuss different aspects of autonomy and give an overview of physical prototypes of continuum robots.
Read more4/10/2024