Gaussian is All You Need: A Unified Framework for Solving Inverse Problems via Diffusion Posterior Sampling

0

Sign in to get full access
Overview
- Unified framework for solving inverse problems using diffusion posterior sampling
- Demonstrates effectiveness across various inverse problems like image denoising, super-resolution, and inpainting
- Proposes a novel Gaussian noise model that can handle general inverse problems with complex noise distributions
Plain English Explanation
The paper introduces a unified framework for solving inverse problems using a technique called diffusion posterior sampling. Inverse problems are tasks where the goal is to recover an unknown signal or image from noisy or incomplete measurements.
The key idea is to model the inverse problem using a Gaussian noise model, which can handle complex noise distributions that are common in real-world scenarios. This Gaussian noise model is then combined with a diffusion process to efficiently sample from the posterior distribution and obtain high-quality reconstructions.
The proposed framework is shown to be effective across a variety of inverse problems, including image denoising, super-resolution, and inpainting. It outperforms state-of-the-art methods, demonstrating the power of the unified approach.
Technical Explanation
The paper presents a unified framework for solving inverse problems using diffusion posterior sampling. Inverse problems involve recovering an unknown signal or image from noisy or incomplete measurements, and are commonly encountered in fields like imaging and signal processing.
The core of the framework is a Gaussian noise model that can handle complex noise distributions, unlike traditional approaches that rely on simplified noise assumptions. This Gaussian model is then combined with a diffusion process to efficiently sample from the posterior distribution and obtain high-quality reconstructions.
The experiments show the effectiveness of the proposed approach across a range of inverse problems, including image denoising, super-resolution, and inpainting. The unified framework outperforms state-of-the-art methods, showcasing the advantages of the Gaussian noise model and diffusion posterior sampling.
Critical Analysis
The paper presents a novel and promising approach for solving inverse problems using diffusion posterior sampling. The use of a Gaussian noise model to handle complex noise distributions is a key strength, as it allows the framework to be applied to a wider range of real-world scenarios.
However, the paper does not provide a thorough analysis of the limitations or potential issues of the proposed approach. For example, it is unclear how the framework would perform on extremely ill-posed inverse problems or how it would scale to very high-dimensional settings.
Additionally, the paper could have delved deeper into the theoretical underpinnings of the diffusion process and its connection to the Gaussian noise model. A more detailed analysis of the convergence properties and sampling efficiency of the diffusion posterior sampling could also be valuable.
Conclusion
The Gaussian is All You Need paper introduces a unified framework for solving inverse problems using diffusion posterior sampling. The key innovation is the use of a Gaussian noise model that can handle complex noise distributions, which is then combined with a diffusion process to obtain high-quality reconstructions.
The experimental results demonstrate the effectiveness of the proposed approach across a variety of inverse problems, including image denoising, super-resolution, and inpainting. This suggests that the unified framework has the potential to have a significant impact on fields that rely on inverse problem solving, such as imaging and signal processing.
While the paper presents a novel and promising approach, further research is needed to explore the limitations and theoretical underpinnings of the diffusion posterior sampling technique. Nonetheless, this work represents an important step towards developing more robust and versatile solutions for inverse problems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gaussian is All You Need: A Unified Framework for Solving Inverse Problems via Diffusion Posterior Sampling
Nebiyou Yismaw, Ulugbek S. Kamilov, M. Salman Asif
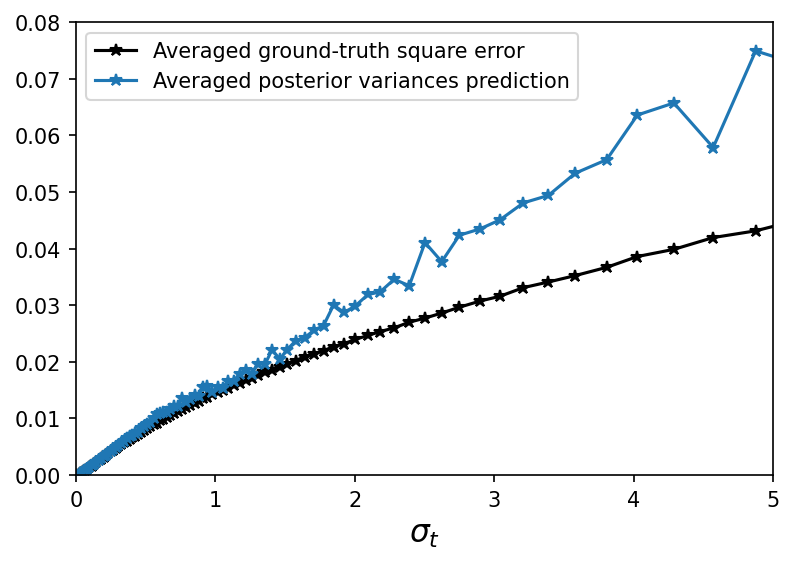
Diffusion models can generate a variety of high-quality images by modeling complex data distributions. Trained diffusion models can also be very effective image priors for solving inverse problems. Most of the existing diffusion-based methods integrate data consistency steps within the diffusion reverse sampling process. The data consistency steps rely on an approximate likelihood function. In this paper, we show that the existing approximations are either insufficient or computationally inefficient. To address these issues, we propose a unified likelihood approximation method that incorporates a covariance correction term to enhance the performance and avoids propagating gradients through the diffusion model. The correction term, when integrated into the reverse diffusion sampling process, achieves better convergence towards the true data posterior for selected distributions and improves performance on real-world natural image datasets. Furthermore, we present an efficient way to factorize and invert the covariance matrix of the likelihood function for several inverse problems. We present comprehensive experiments to demonstrate the effectiveness of our method over several existing approaches.
Read more9/16/2024
👁️
0
Diffusion Posterior Sampling for General Noisy Inverse Problems
Hyungjin Chung, Jeongsol Kim, Michael T. Mccann, Marc L. Klasky, Jong Chul Ye
Diffusion models have been recently studied as powerful generative inverse problem solvers, owing to their high quality reconstructions and the ease of combining existing iterative solvers. However, most works focus on solving simple linear inverse problems in noiseless settings, which significantly under-represents the complexity of real-world problems. In this work, we extend diffusion solvers to efficiently handle general noisy (non)linear inverse problems via approximation of the posterior sampling. Interestingly, the resulting posterior sampling scheme is a blended version of diffusion sampling with the manifold constrained gradient without a strict measurement consistency projection step, yielding a more desirable generative path in noisy settings compared to the previous studies. Our method demonstrates that diffusion models can incorporate various measurement noise statistics such as Gaussian and Poisson, and also efficiently handle noisy nonlinear inverse problems such as Fourier phase retrieval and non-uniform deblurring. Code available at https://github.com/DPS2022/diffusion-posterior-sampling
Read more5/21/2024
0
Improving Diffusion Models for Inverse Problems Using Optimal Posterior Covariance
Xinyu Peng, Ziyang Zheng, Wenrui Dai, Nuoqian Xiao, Chenglin Li, Junni Zou, Hongkai Xiong
Recent diffusion models provide a promising zero-shot solution to noisy linear inverse problems without retraining for specific inverse problems. In this paper, we reveal that recent methods can be uniformly interpreted as employing a Gaussian approximation with hand-crafted isotropic covariance for the intractable denoising posterior to approximate the conditional posterior mean. Inspired by this finding, we propose to improve recent methods by using more principled covariance determined by maximum likelihood estimation. To achieve posterior covariance optimization without retraining, we provide general plug-and-play solutions based on two approaches specifically designed for leveraging pre-trained models with and without reverse covariance. We further propose a scalable method for learning posterior covariance prediction based on representation with orthonormal basis. Experimental results demonstrate that the proposed methods significantly enhance reconstruction performance without requiring hyperparameter tuning.
Read more6/4/2024
0
Principled Probabilistic Imaging using Diffusion Models as Plug-and-Play Priors
Zihui Wu, Yu Sun, Yifan Chen, Bingliang Zhang, Yisong Yue, Katherine L. Bouman
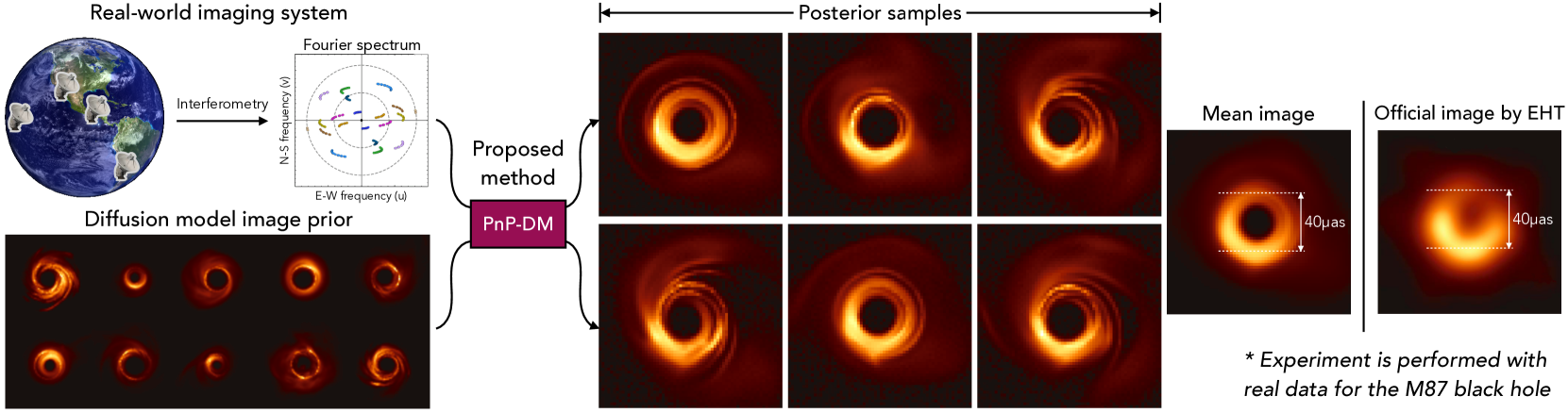
Diffusion models (DMs) have recently shown outstanding capability in modeling complex image distributions, making them expressive image priors for solving Bayesian inverse problems. However, most existing DM-based methods rely on approximations in the generative process to be generic to different inverse problems, leading to inaccurate sample distributions that deviate from the target posterior defined within the Bayesian framework. To harness the generative power of DMs while avoiding such approximations, we propose a Markov chain Monte Carlo algorithm that performs posterior sampling for general inverse problems by reducing it to sampling the posterior of a Gaussian denoising problem. Crucially, we leverage a general DM formulation as a unified interface that allows for rigorously solving the denoising problem with a range of state-of-the-art DMs. We demonstrate the effectiveness of the proposed method on six inverse problems (three linear and three nonlinear), including a real-world black hole imaging problem. Experimental results indicate that our proposed method offers more accurate reconstructions and posterior estimation compared to existing DM-based imaging inverse methods.
Read more5/30/2024