Gaussian-Sum Filter for Range-based 3D Relative Pose Estimation in the Presence of Ambiguities

0
⛏️
Sign in to get full access
Overview
- Multi-robot systems need to accurately estimate the relative positions and orientations (poses) between robots to collaborate effectively without external assistance.
- 3D relative pose estimation using range measurements can have multiple possible solutions, called ambiguities, which can cause problems.
- This paper addresses this challenge by:
- Identifying and accurately estimating all possible ambiguities in 2D
- Treating the ambiguities as components of a Gaussian mixture model
- Presenting a computationally-efficient estimator, in the form of a Gaussian-sum filter (GSF), to perform range-based relative pose estimation in a 3D, infrastructure-free setup
Plain English Explanation
When multiple robots need to work together on a task, they must be able to accurately determine the positions and orientations (poses) of each other. This is important for coordinating their movements and actions. However, using just distance measurements to estimate these 3D poses can lead to multiple possible solutions, or "ambiguities," which can cause problems.
This paper tackles this issue in a few key ways:
-
Identifying and Estimating 2D Ambiguities: The researchers first looked at the problem in 2D and figured out all the possible ambiguous poses that could occur.
-
Gaussian Mixture Model: They then treated these ambiguous poses as part of a statistical model called a Gaussian mixture model. This allowed them to capture the uncertainty and multiple possible solutions.
-
Gaussian-Sum Filter: Finally, the researchers developed a computationally-efficient algorithm called a Gaussian-sum filter (GSF) to estimate the 3D relative poses using the range measurements, while accounting for the ambiguities.
By using this GSF approach, the researchers were able to avoid the robot poses getting stuck in local minima caused by the ambiguous solutions. Their method also performed better than a simpler Extended Kalman Filter and had similar performance to a more complex Particle Filter, but was much faster computationally.
Technical Explanation
The key technical contributions of this paper are:
-
Ambiguity Identification and Estimation in 2D: The researchers first analyzed the 2D case of relative pose estimation using range measurements. They were able to identify and accurately estimate all the possible ambiguous solutions that can occur in this 2D setup.
-
Gaussian Mixture Model for Ambiguities: The researchers then treated these ambiguous 2D poses as components of a Gaussian mixture model. This allowed them to capture the uncertainty and multiple possible solutions in a probabilistic framework.
-
Gaussian-Sum Filter for 3D Relative Pose Estimation: Building on the 2D analysis, the researchers developed a Gaussian-sum filter (GSF) to perform 3D relative pose estimation using range measurements. The GSF is able to efficiently estimate all the possible ambiguous poses while avoiding divergence to local minima.
The researchers evaluated their GSF-based approach in both simulation and real-world experiments. They showed that it outperforms a standard Extended Kalman Filter and has similar performance to a more computationally-demanding Particle Filter, but at a much lower computational cost.
Critical Analysis
The paper provides a solid technical contribution in addressing the challenge of ambiguous 3D relative pose estimation using range measurements. The researchers' approach of modeling the ambiguities as a Gaussian mixture and using an efficient GSF estimator is well-designed and evaluated thoroughly.
However, the paper does not extensively discuss the limitations of the proposed method. For example, it is unclear how the approach would scale to larger numbers of robots or handle more complex environments with occlusions or sensor noise. Additionally, the researchers do not explore potential extensions of the method, such as incorporating other sensing modalities beyond just range measurements.
Further research could investigate the robustness of the GSF-based approach in more realistic multi-robot scenarios, as well as explore ways to adapt the method to handle a wider range of practical challenges. Nonetheless, this paper presents a valuable step forward in enabling reliable, infrastructure-free relative localization for collaborative multi-robot systems.
Conclusion
This paper tackles the important problem of 3D relative pose estimation between robots using only range measurements, which can suffer from ambiguous solutions. The researchers develop a Gaussian-sum filter-based approach that can efficiently identify and estimate all possible ambiguous poses, avoiding convergence to local minima.
The proposed method is shown to outperform a standard Extended Kalman Filter and perform similarly to a more computationally-intensive Particle Filter, making it a practical solution for infrastructure-free, collaborative multi-robot systems. While the paper does not extensively explore the limitations of the approach, it represents an important contribution towards enabling robust relative localization for robots operating in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
⛏️
0
New!Gaussian-Sum Filter for Range-based 3D Relative Pose Estimation in the Presence of Ambiguities
Syed S. Ahmed, Mohammed A. Shalaby, Charles C. Cossette, Jerome Le Ny, James R. Forbes
Multi-robot systems must have the ability to accurately estimate relative states between robots in order to perform collaborative tasks, possibly with no external aiding. Three-dimensional relative pose estimation using range measurements oftentimes suffers from a finite number of non-unique solutions, or ambiguities. This paper: 1) identifies and accurately estimates all possible ambiguities in 2D; 2) treats them as components of a Gaussian mixture model; and 3) presents a computationally-efficient estimator, in the form of a Gaussian-sum filter (GSF), to realize range-based relative pose estimation in an infrastructure-free, 3D, setup. This estimator is evaluated in simulation and experiment and is shown to avoid divergence to local minima induced by the ambiguous poses. Furthermore, the proposed GSF outperforms an extended Kalman filter, demonstrates similar performance to the computationally-demanding particle filter, and is shown to be consistent.
Read more9/20/2024
0
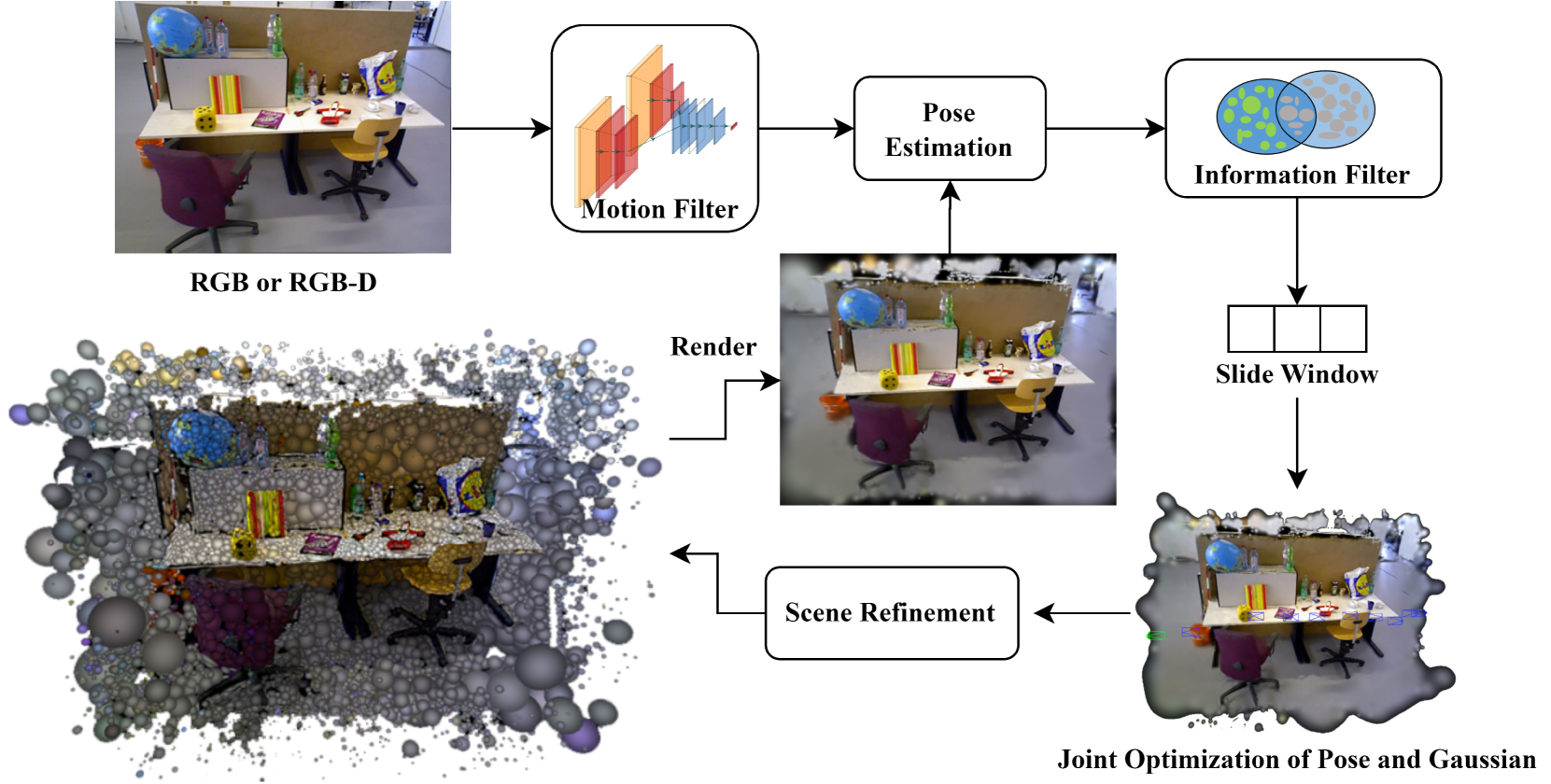
MotionGS : Compact Gaussian Splatting SLAM by Motion Filter
Xinli Guo, Weidong Zhang, Ruonan Liu, Peng Han, Hongtian Chen
With their high-fidelity scene representation capability, the attention of SLAM field is deeply attracted by the Neural Radiation Field (NeRF) and 3D Gaussian Splatting (3DGS). Recently, there has been a surge in NeRF-based SLAM, while 3DGS-based SLAM is sparse. A novel 3DGS-based SLAM approach with a fusion of deep visual feature, dual keyframe selection and 3DGS is presented in this paper. Compared with the existing methods, the proposed tracking is achieved by feature extraction and motion filter on each frame. The joint optimization of poses and 3D Gaussians runs through the entire mapping process. Additionally, the coarse-to-fine pose estimation and compact Gaussian scene representation are implemented by dual keyframe selection and novel loss functions. Experimental results demonstrate that the proposed algorithm not only outperforms the existing methods in tracking and mapping, but also has less memory usage.
Read more6/3/2024
0
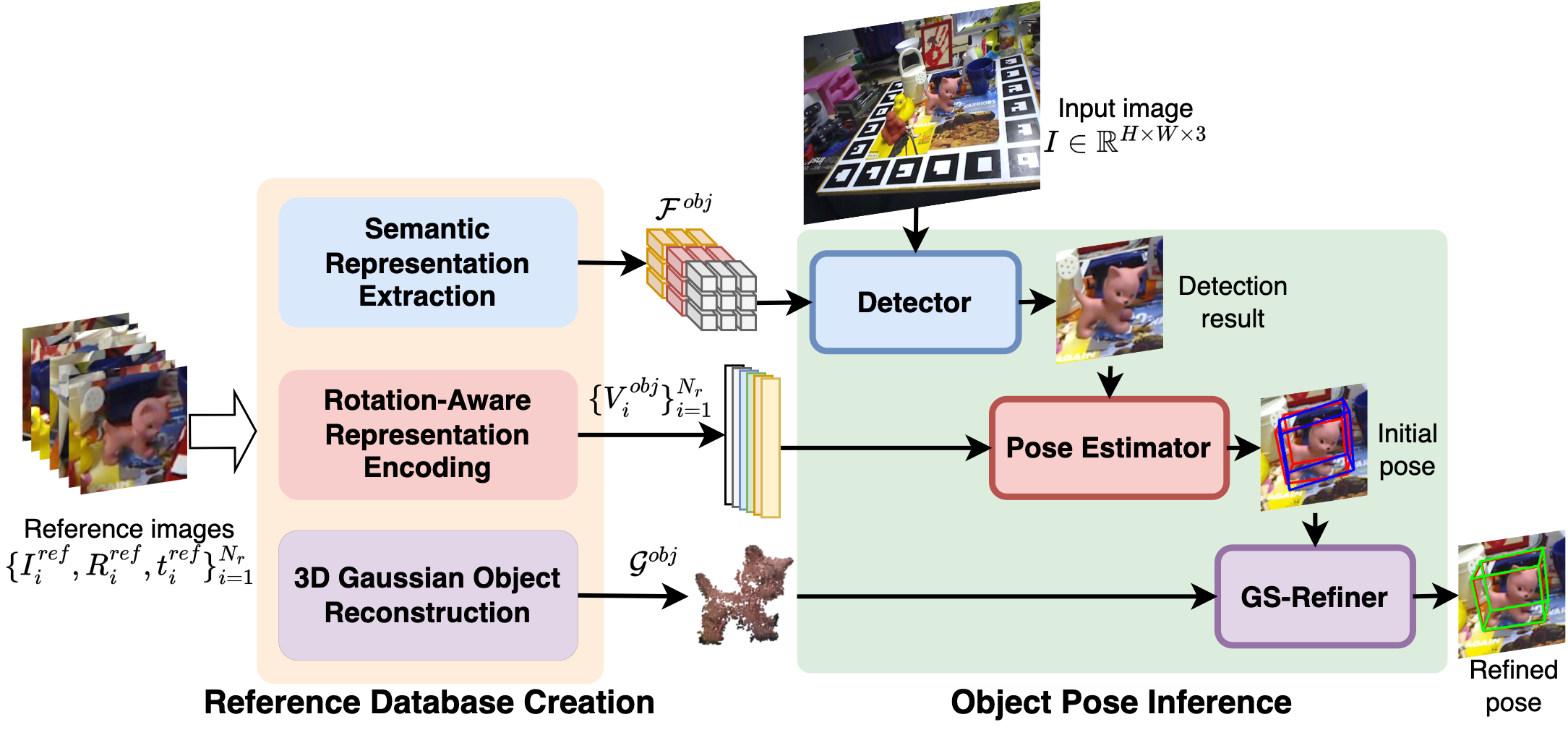
GS-Pose: Generalizable Segmentation-based 6D Object Pose Estimation with 3D Gaussian Splatting
Dingding Cai, Janne Heikkila, Esa Rahtu
This paper introduces GS-Pose, a unified framework for localizing and estimating the 6D pose of novel objects. GS-Pose begins with a set of posed RGB images of a previously unseen object and builds three distinct representations stored in a database. At inference, GS-Pose operates sequentially by locating the object in the input image, estimating its initial 6D pose using a retrieval approach, and refining the pose with a render-and-compare method. The key insight is the application of the appropriate object representation at each stage of the process. In particular, for the refinement step, we leverage 3D Gaussian splatting, a novel differentiable rendering technique that offers high rendering speed and relatively low optimization time. Off-the-shelf toolchains and commodity hardware, such as mobile phones, can be used to capture new objects to be added to the database. Extensive evaluations on the LINEMOD and OnePose-LowTexture datasets demonstrate excellent performance, establishing the new state-of-the-art. Project page: https://dingdingcai.github.io/gs-pose.
Read more8/15/2024

0
Object Gaussian for Monocular 6D Pose Estimation from Sparse Views
Luqing Luo, Shichu Sun, Jiangang Yang, Linfang Zheng, Jinwei Du, Jian Liu
Monocular object pose estimation, as a pivotal task in computer vision and robotics, heavily depends on accurate 2D-3D correspondences, which often demand costly CAD models that may not be readily available. Object 3D reconstruction methods offer an alternative, among which recent advancements in 3D Gaussian Splatting (3DGS) afford a compelling potential. Yet its performance still suffers and tends to overfit with fewer input views. Embracing this challenge, we introduce SGPose, a novel framework for sparse view object pose estimation using Gaussian-based methods. Given as few as ten views, SGPose generates a geometric-aware representation by starting with a random cuboid initialization, eschewing reliance on Structure-from-Motion (SfM) pipeline-derived geometry as required by traditional 3DGS methods. SGPose removes the dependence on CAD models by regressing dense 2D-3D correspondences between images and the reconstructed model from sparse input and random initialization, while the geometric-consistent depth supervision and online synthetic view warping are key to the success. Experiments on typical benchmarks, especially on the Occlusion LM-O dataset, demonstrate that SGPose outperforms existing methods even under sparse view constraints, under-scoring its potential in real-world applications.
Read more9/5/2024