GauU-Scene V2: Expanse Lidar Image Dataset Shows Unreliable Geometric Reconstruction Using Gaussian Splatting and NeRF
2404.04880
0
0
🖼️
Abstract
We introduce a novel, multimodal large-scale scene reconstruction benchmark that utilizes newly developed 3D representation approaches: Gaussian Splatting and Neural Radiance Fields (NeRF). Our expansive U-Scene dataset surpasses any previously existing real large-scale outdoor LiDAR and image dataset in both area and point count. GauU-Scene encompasses over 6.5 square kilometers and features a comprehensive RGB dataset coupled with LiDAR ground truth. Additionally, we are the first to propose a LiDAR and image alignment method for a drone-based dataset. Our assessment of GauU-Scene includes a detailed analysis across various novel viewpoints, employing image-based metrics such as SSIM, LPIPS, and PSNR on NeRF and Gaussian Splatting based methods. This analysis reveals contradictory results when applying geometric-based metrics like Chamfer distance. The experimental results on our multimodal dataset highlight the unreliability of current image-based metrics and reveal significant drawbacks in geometric reconstruction using the current Gaussian Splatting-based method, further illustrating the necessity of our dataset for assessing geometry reconstruction tasks. We also provide detailed supplementary information on data collection protocols and make the dataset available on the following anonymous project page
Create account to get full access
Overview
- This paper presents a novel approach to surface reconstruction from Gaussian splatting, a technique for representing 3D data using Gaussian distributions.
- The method builds upon previous work on Gaussian SLAM, Splatting Wild Images, and Hybrid Gaussian Splatting for dense 3D mapping.
- The authors introduce a new algorithm called Z-Splat, which uses Gaussian splatting along the camera's z-axis to improve surface reconstruction.
Plain English Explanation
The paper describes a new way to reconstruct 3D surfaces from data that has been represented using Gaussian distributions, a type of statistical model. This builds on previous work that used Gaussian distributions for 3D mapping and reconstruction.
The key innovation is a new algorithm called Z-Splat, which focuses on the depth (z-axis) information from the camera to improve the quality of the reconstructed surfaces. By concentrating on the depth data, Z-Splat is able to create more accurate and detailed 3D models compared to earlier approaches.
This is an important advancement because accurate 3D reconstruction has many applications, such as in robotics, augmented reality, and digital content creation. The Gaussian splatting techniques provide an efficient way to represent 3D data, and the Z-Splat algorithm helps unlock the full potential of this representation for surface reconstruction.
Technical Explanation
The paper introduces a new algorithm called Z-Splat for surface reconstruction from Gaussian splatting. Gaussian splatting is a technique for representing 3D data using Gaussian distributions, which was previously used in Gaussian SLAM for dense 3D mapping and in Splatting Wild Images for image-based 3D reconstruction.
The key innovation in Z-Splat is the focus on the depth (z-axis) information from the camera. Previous approaches like Hybrid Gaussian Splatting considered all spatial dimensions equally, but Z-Splat leverages the high-quality depth data along the z-axis to improve the surface reconstruction.
The authors demonstrate that by concentrating on the z-axis, Z-Splat is able to generate more accurate and detailed 3D models compared to earlier Gaussian splatting techniques. They evaluate the method on several benchmark datasets and show significant improvements in reconstruction quality.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the Z-Splat algorithm, including comparisons to state-of-the-art methods. However, the authors acknowledge several limitations and areas for future work.
One potential concern is the sensitivity of the algorithm to noise and outliers in the depth data, which could affect the quality of the reconstructed surfaces. The authors suggest that incorporating additional robustness measures could help address this issue.
Additionally, the current implementation of Z-Splat is relatively computationally intensive, which may limit its practical application in real-time scenarios. Further optimizations or approximations may be needed to make the algorithm more efficient.
Finally, the paper focuses on static scenes, and it's unclear how well the Z-Splat approach would perform in dynamic environments with moving objects. Extending the algorithm to handle such scenarios could be an interesting direction for future research.
Conclusion
The Z-Splat algorithm presented in this paper represents a significant advancement in surface reconstruction from Gaussian splatting. By leveraging the high-quality depth information along the camera's z-axis, the method can generate more accurate and detailed 3D models compared to previous approaches.
This work has important implications for a wide range of applications that rely on accurate 3D reconstruction, such as robotics, augmented reality, and digital content creation. While the current implementation has some limitations, the underlying principles of Z-Splat could inspire further research and refinements, ultimately leading to more robust and efficient surface reconstruction techniques.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Photorealistic 3D Urban Scene Reconstruction and Point Cloud Extraction using Google Earth Imagery and Gaussian Splatting
Kyle Gao, Dening Lu, Hongjie He, Linlin Xu, Jonathan Li
0
0
3D urban scene reconstruction and modelling is a crucial research area in remote sensing with numerous applications in academia, commerce, industry, and administration. Recent advancements in view synthesis models have facilitated photorealistic 3D reconstruction solely from 2D images. Leveraging Google Earth imagery, we construct a 3D Gaussian Splatting model of the Waterloo region centered on the University of Waterloo and are able to achieve view-synthesis results far exceeding previous 3D view-synthesis results based on neural radiance fields which we demonstrate in our benchmark. Additionally, we retrieved the 3D geometry of the scene using the 3D point cloud extracted from the 3D Gaussian Splatting model which we benchmarked against our Multi- View-Stereo dense reconstruction of the scene, thereby reconstructing both the 3D geometry and photorealistic lighting of the large-scale urban scene through 3D Gaussian Splatting
6/4/2024
A Refined 3D Gaussian Representation for High-Quality Dynamic Scene Reconstruction
Bin Zhang, Bi Zeng, Zexin Peng
0
0
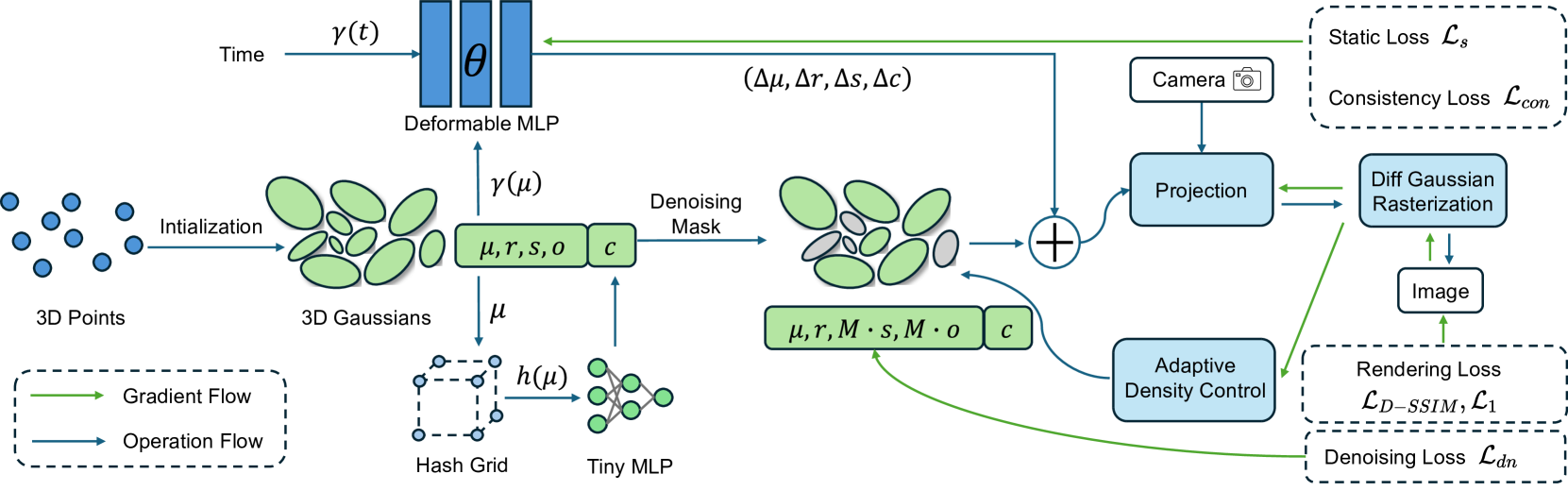
In recent years, Neural Radiance Fields (NeRF) has revolutionized three-dimensional (3D) reconstruction with its implicit representation. Building upon NeRF, 3D Gaussian Splatting (3D-GS) has departed from the implicit representation of neural networks and instead directly represents scenes as point clouds with Gaussian-shaped distributions. While this shift has notably elevated the rendering quality and speed of radiance fields but inevitably led to a significant increase in memory usage. Additionally, effectively rendering dynamic scenes in 3D-GS has emerged as a pressing challenge. To address these concerns, this paper purposes a refined 3D Gaussian representation for high-quality dynamic scene reconstruction. Firstly, we use a deformable multi-layer perceptron (MLP) network to capture the dynamic offset of Gaussian points and express the color features of points through hash encoding and a tiny MLP to reduce storage requirements. Subsequently, we introduce a learnable denoising mask coupled with denoising loss to eliminate noise points from the scene, thereby further compressing 3D Gaussian model. Finally, motion noise of points is mitigated through static constraints and motion consistency constraints. Experimental results demonstrate that our method surpasses existing approaches in rendering quality and speed, while significantly reducing the memory usage associated with 3D-GS, making it highly suitable for various tasks such as novel view synthesis, and dynamic mapping.
5/29/2024

Gaussian-LIC: Photo-realistic LiDAR-Inertial-Camera SLAM with 3D Gaussian Splatting
Xiaolei Lang, Laijian Li, Hang Zhang, Feng Xiong, Mu Xu, Yong Liu, Xingxing Zuo, Jiajun Lv
0
0
We present a real-time LiDAR-Inertial-Camera SLAM system with 3D Gaussian Splatting as the mapping backend. Leveraging robust pose estimates from our LiDAR-Inertial-Camera odometry, Coco-LIC, an incremental photo-realistic mapping system is proposed in this paper. We initialize 3D Gaussians from colorized LiDAR points and optimize them using differentiable rendering powered by 3D Gaussian Splatting. Meticulously designed strategies are employed to incrementally expand the Gaussian map and adaptively control its density, ensuring high-quality mapping with real-time capability. Experiments conducted in diverse scenarios demonstrate the superior performance of our method compared to existing radiance-field-based SLAM systems.
4/11/2024

Self-Calibrating 4D Novel View Synthesis from Monocular Videos Using Gaussian Splatting
Fang Li, Hao Zhang, Narendra Ahuja
0
0
Gaussian Splatting (GS) has significantly elevated scene reconstruction efficiency and novel view synthesis (NVS) accuracy compared to Neural Radiance Fields (NeRF), particularly for dynamic scenes. However, current 4D NVS methods, whether based on GS or NeRF, primarily rely on camera parameters provided by COLMAP and even utilize sparse point clouds generated by COLMAP for initialization, which lack accuracy as well are time-consuming. This sometimes results in poor dynamic scene representation, especially in scenes with large object movements, or extreme camera conditions e.g. small translations combined with large rotations. Some studies simultaneously optimize the estimation of camera parameters and scenes, supervised by additional information like depth, optical flow, etc. obtained from off-the-shelf models. Using this unverified information as ground truth can reduce robustness and accuracy, which does frequently occur for long monocular videos (with e.g. > hundreds of frames). We propose a novel approach that learns a high-fidelity 4D GS scene representation with self-calibration of camera parameters. It includes the extraction of 2D point features that robustly represent 3D structure, and their use for subsequent joint optimization of camera parameters and 3D structure towards overall 4D scene optimization. We demonstrate the accuracy and time efficiency of our method through extensive quantitative and qualitative experimental results on several standard benchmarks. The results show significant improvements over state-of-the-art methods for 4D novel view synthesis. The source code will be released soon at https://github.com/fangli333/SC-4DGS.
6/4/2024