G$ mathbf{^2} $VD Planner: Efficient Motion Planning With Grid-based Generalized Voronoi Diagrams

0
🛸
Sign in to get full access
Overview
- A new efficient motion planning approach for mobile robots is proposed, using grid-based generalized Voronoi diagrams (G$\mathbf{^2}$VD).
- The approach has two key novelties: 1) a new state lattice-based path searching approach with a reduced search space, and 2) an efficient quadratic programming-based path smoothing approach that considers clearance to obstacles.
- The proposed approach is validated through simulations and outdoor experiments, showing improved computational efficiency and path smoothness compared to existing methods.
Plain English Explanation
The paper presents a new motion planning approach for mobile robots that aims to be more efficient and produce smoother paths. The key ideas are:
-
Reduced Search Space: Instead of searching the entire environment, the approach uses a novel Voronoi corridor to limit the search space, making the path planning process more efficient.
-
Obstacle Clearance: The path smoothing step considers the clearance to obstacles, ensuring the final path avoids getting too close to obstacles, unlike some previous "hard-constrained" approaches.
The researchers tested this new approach in various challenging simulation scenarios and real-world outdoor environments. They found that the path searching stage was 17.1% more efficient, and the path smoothing was 6.6 times faster than an advanced existing method, and 53.3 times faster than a popular alternative.
Technical Explanation
The paper proposes a new motion planning approach for mobile robots that leverages grid-based generalized Voronoi diagrams (G$\mathbf{^2}$VD) to improve efficiency and path smoothness.
The key novelties are:
-
State Lattice-based Path Searching: The researchers developed a new path searching approach that uses a state lattice to reduce the search space to a Voronoi corridor. This helps improve the computational efficiency of the path planning process.
-
Quadratic Programming-based Path Smoothing: An efficient path smoothing technique is presented that uses quadratic programming to optimize the path, considering the clearance to obstacles. This helps produce smoother paths compared to previous "hard-constrained" approaches.
The proposed approach was validated through extensive simulations and outdoor experiments on the researchers' campus. The results show that the path searching stage was 17.1% more efficient, and the path smoothing was 6.6 times faster than an advanced sparse-banded structure-based method, and 53.3 times faster than the popular timed-elastic-band planner.
Critical Analysis
The paper presents a promising new motion planning approach that addresses important efficiency and path quality concerns. The use of the Voronoi corridor to reduce the search space is a clever idea that seems to pay off in the reported results.
However, the paper does not provide much detail on the specific implementation of the quadratic programming-based path smoothing approach. More information on the objective function, constraints, and overall optimization process would be helpful to fully evaluate this component of the work.
Additionally, the paper only evaluates the approach in simulation and a single outdoor environment. Further testing in more diverse real-world scenarios would help validate the generalizability of the method.
Finally, the paper does not discuss any potential limitations or future research directions. Exploring edge cases, analyzing failure modes, and identifying areas for improvement would strengthen the overall contribution.
Conclusion
This paper presents a new efficient motion planning approach for mobile robots that leverages grid-based generalized Voronoi diagrams. The key innovations are a novel state lattice-based path searching technique with a reduced search space, and an effective quadratic programming-based path smoothing method that considers obstacle clearance.
The proposed approach demonstrates significant improvements in computational efficiency and path quality compared to existing methods, as evidenced by the simulation and outdoor experiment results. This work represents an important step forward in enhancing the real-world applicability of motion planning algorithms for mobile robots.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛸
0
G$ mathbf{^2} $VD Planner: Efficient Motion Planning With Grid-based Generalized Voronoi Diagrams
Jian Wen, Xuebo Zhang, Qingchen Bi, Hui Liu, Jing Yuan, Yongchun Fang
In this paper, an efficient motion planning approach with grid-based generalized Voronoi diagrams (G$ mathbf{^2} $VD) is newly proposed for mobile robots. Different from existing approaches, the novelty of this work is twofold: 1) a new state lattice-based path searching approach is proposed, in which the search space is reduced to a novel Voronoi corridor to further improve the search efficiency; 2) an efficient quadratic programming-based path smoothing approach is presented, wherein the clearance to obstacles is considered to improve the path clearance of hard-constrained path smoothing approaches. We validate the efficiency and smoothness of our approach in various challenging simulation scenarios and outdoor environments. It is shown that the computational efficiency is improved by 17.1% in the path searching stage, and path smoothing with the proposed approach is 6.6 times faster than an advanced sparse-banded structure-based path smoothing approach and 53.3 times faster than the popular timed-elastic-band planner. A video showing outdoor navigation on our campus is available at https://youtu.be/iMXGthgvp58.
Read more5/8/2024

0
Fast and Communication-Efficient Multi-UAV Exploration Via Voronoi Partition on Dynamic Topological Graph
Qianli Dong, Haobo Xi, Shiyong Zhang, Qingchen Bi, Tianyi Li, Ziyu Wang, Xuebo Zhang
Efficient data transmission and reasonable task allocation are important to improve multi-robot exploration efficiency. However, most communication data types typically contain redundant information and thus require massive communication volume. Moreover, exploration-oriented task allocation is far from trivial and becomes even more challenging for resource-limited unmanned aerial vehicles (UAVs). In this paper, we propose a fast and communication-efficient multi-UAV exploration method for exploring large environments. We first design a multi-robot dynamic topological graph (MR-DTG) consisting of nodes representing the explored and exploring regions and edges connecting nodes. Supported by MR-DTG, our method achieves efficient communication by only transferring the necessary information required by exploration planning. To further improve the exploration efficiency, a hierarchical multi-UAV exploration method is devised using MR-DTG. Specifically, the emph{graph Voronoi partition} is used to allocate MR-DTG's nodes to the closest UAVs, considering the actual motion cost, thus achieving reasonable task allocation. To our knowledge, this is the first work to address multi-UAV exploration using emph{graph Voronoi partition}. The proposed method is compared with a state-of-the-art method in simulations. The results show that the proposed method is able to reduce the exploration time and communication volume by up to 38.3% and 95.5%, respectively. Finally, the effectiveness of our method is validated in the real-world experiment with 6 UAVs. We will release the source code to benefit the community.
Read more8/13/2024
🔎
0
Stochastic Motion Planning as Gaussian Variational Inference: Theory and Algorithms
Hongzhe Yu, Yongxin Chen
We present a novel formulation for motion planning under uncertainties based on variational inference where the optimal motion plan is modeled as a posterior distribution. We propose a Gaussian variational inference-based framework, termed Gaussian Variational Inference Motion Planning (GVI-MP), to approximate this posterior by a Gaussian distribution over the trajectories. We show that the GVI-MP framework is dual to a special class of stochastic control problems and brings robustness into the decision-making in motion planning. We develop two algorithms to numerically solve this variational inference and the equivalent control formulations for motion planning. The first algorithm uses a natural gradient paradigm to iteratively update a Gaussian proposal distribution on the sparse motion planning factor graph. We propose a second algorithm, the Proximal Covariance Steering Motion Planner (PCS-MP), to solve the same inference problem in its stochastic control form with an additional terminal constraint. We leverage a proximal gradient paradigm where, at each iteration, we quadratically approximate nonlinear state costs and solve a linear covariance steering problem in closed form. The efficacy of the proposed algorithms is demonstrated through extensive experiments on various robot models. An implementation is provided in https://github.com/hzyu17/VIMP.
Read more7/16/2024
0
Towards A General-Purpose Motion Planning for Autonomous Vehicles Using Fluid Dynamics
MReza Alipour Sormoli, Konstantinos Koufos, Mehrdad Dianati, Roger Woodman
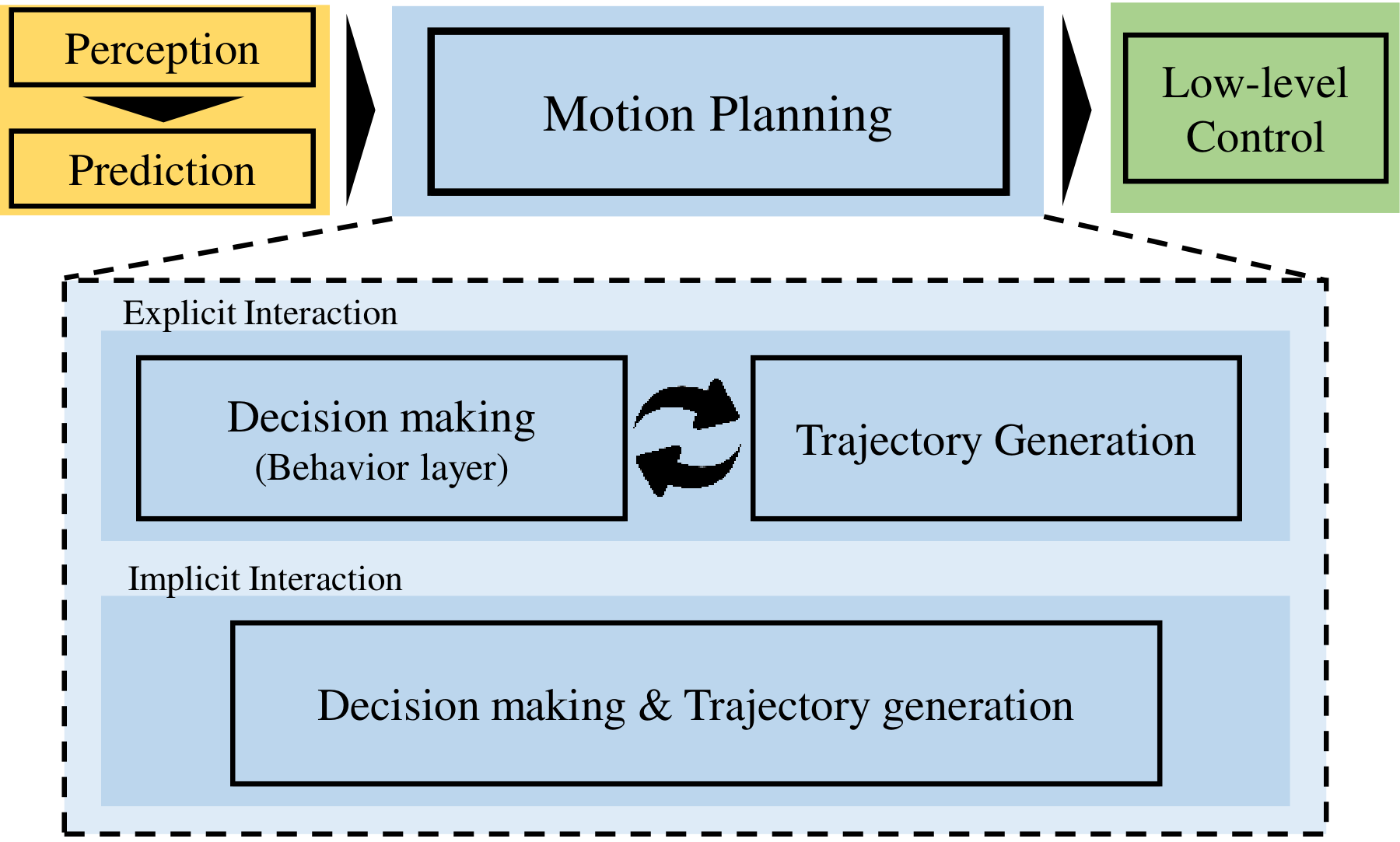
General-purpose motion planners for automated/autonomous vehicles promise to handle the task of motion planning (including tactical decision-making and trajectory generation) for various automated driving functions (ADF) in a diverse range of operational design domains (ODDs). The challenges of designing a general-purpose motion planner arise from several factors: a) A plethora of scenarios with different semantic information in each driving scene should be addressed, b) a strong coupling between long-term decision-making and short-term trajectory generation shall be taken into account, c) the nonholonomic constraints of the vehicle dynamics must be considered, and d) the motion planner must be computationally efficient to run in real-time. The existing methods in the literature are either limited to specific scenarios (logic-based) or are data-driven (learning-based) and therefore lack explainability, which is important for safety-critical automated driving systems (ADS). This paper proposes a novel general-purpose motion planning solution for ADS inspired by the theory of fluid mechanics. A computationally efficient technique, i.e., the lattice Boltzmann method, is then adopted to generate a spatiotemporal vector field, which in accordance with the nonholonomic dynamic model of the Ego vehicle is employed to generate feasible candidate trajectories. The trajectory optimising ride quality, efficiency and safety is finally selected to calculate the imminent control signals, i.e., throttle/brake and steering angle. The performance of the proposed approach is evaluated by simulations in highway driving, on-ramp merging, and intersection crossing scenarios, and it is found to outperform traditional motion planning solutions based on model predictive control (MPC).
Read more6/11/2024