Generalization of Task Parameterized Dynamical Systems using Gaussian Process Transportation

0
Sign in to get full access
Overview
- This paper proposes a method to generalize task-parameterized dynamical systems using Gaussian Process Transportation.
- The approach aims to learn a mapping between different task parameters and the corresponding dynamical system parameters.
- This allows for the efficient adaptation of dynamical systems to new task parameters without retraining from scratch.
Plain English Explanation
In this paper, the researchers present a new way to adapt robotic systems to different tasks or scenarios. Typically, when a robot needs to perform a new task, the underlying mathematical model (called a dynamical system) that governs the robot's movements has to be retrained from the beginning. This can be time-consuming and inefficient.
The key idea in this work is to learn a
Once this mapping is learned, the robot can quickly adapt its dynamical system to a new task by simply looking up the corresponding dynamical system parameters, without the need for full retraining. This makes the robot much more flexible and efficient at adapting to changing scenarios.
The researchers demonstrate the effectiveness of their approach through various experiments, showing that it can outperform traditional methods in terms of both adaptation speed and final task performance.
Technical Explanation
The paper proposes a framework for
Specifically, the authors formulate the problem as learning a transport map between the task parameter space and the dynamical system parameter space using Gaussian Processes. This transport map implicitly encodes the relationship between the task context and the underlying dynamical system, enabling
The framework is demonstrated on several adaptive robotic information gathering and adaptive gait modeling and optimization tasks, showing improved performance compared to baseline methods. The authors also discuss the potential for transfer learning of the learned transport map to new tasks.
Critical Analysis
The paper presents a promising approach for generalizing task-parameterized dynamical systems, with several important strengths:
- The use of Gaussian Process Transportation allows for a flexible and data-efficient learning of the mapping between task parameters and dynamical system parameters.
- The framework enables efficient adaptation to new task instances, which is a crucial capability for real-world robotic applications.
- The experimental results demonstrate the effectiveness of the proposed method across a range of tasks, suggesting broad applicability.
However, the paper also acknowledges some limitations and areas for future work:
- The current framework assumes that the task parameters and dynamical system parameters have a smooth, invertible relationship, which may not always hold in practice.
- The experiments are conducted in simulation, and the performance on real-world robotic systems remains to be evaluated.
- The scalability of the approach to high-dimensional task and dynamical system spaces is not fully addressed.
Additionally, one could raise questions about the generalization of the learned transport map to drastically different task contexts, and the potential need for additional mechanisms to ensure safe exploration and adaptation during deployment.
Conclusion
This paper presents a novel framework for generalizing task-parameterized dynamical systems using Gaussian Process Transportation. By learning a mapping between task parameters and dynamical system parameters, the approach enables efficient adaptation of robotic systems to new tasks without the need for full retraining.
The key strengths of the method are its data-efficient learning, adaptive capabilities, and demonstrated performance on various simulated tasks. While the paper acknowledges some limitations, the proposed framework represents an important step towards more flexible and versatile robotic systems that can quickly adapt to changing environmental conditions and task requirements.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generalization of Task Parameterized Dynamical Systems using Gaussian Process Transportation
Giovanni Franzese, Ravi Prakash, Jens Kober
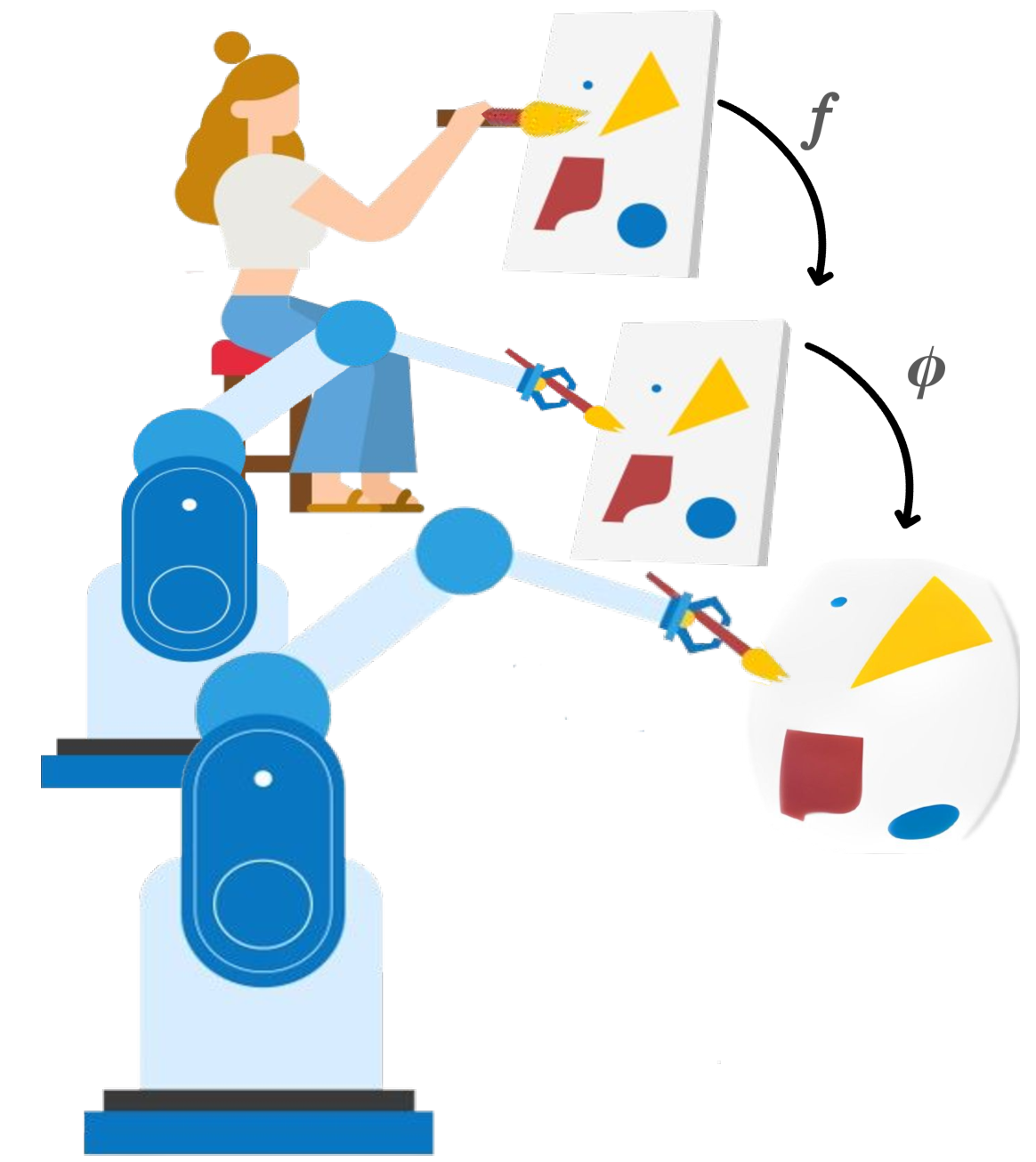
Learning from Interactive Demonstrations has revolutionized the way non-expert humans teach robots. It is enough to kinesthetically move the robot around to teach pick-and-place, dressing, or cleaning policies. However, the main challenge is correctly generalizing to novel situations, e.g., different surfaces to clean or different arm postures to dress. This article proposes a novel task parameterization and generalization to transport the original robot policy, i.e., position, velocity, orientation, and stiffness. Unlike the state of the art, only a set of points are tracked during the demonstration and the execution, e.g., a point cloud of the surface to clean. We then propose to fit a non-linear transformation that would deform the space and then the original policy using the paired source and target point sets. The use of function approximators like Gaussian Processes allows us to generalize, or transport, the policy from every space location while estimating the uncertainty of the resulting policy due to the limited points in the task parameterization point set and the reduced number of demonstrations. We compare the algorithm's performance with state-of-the-art task parameterization alternatives and analyze the effect of different function approximators. We also validated the algorithm on robot manipulation tasks, i.e., different posture arm dressing, different location product reshelving, and different shape surface cleaning.
Read more4/23/2024

0
The Art of Imitation: Learning Long-Horizon Manipulation Tasks from Few Demonstrations
Jan Ole von Hartz, Tim Welschehold, Abhinav Valada, Joschka Boedecker
Task Parametrized Gaussian Mixture Models (TP-GMM) are a sample-efficient method for learning object-centric robot manipulation tasks. However, there are several open challenges to applying TP-GMMs in the wild. In this work, we tackle three crucial challenges synergistically. First, end-effector velocities are non-Euclidean and thus hard to model using standard GMMs. We thus propose to factorize the robot's end-effector velocity into its direction and magnitude, and model them using Riemannian GMMs. Second, we leverage the factorized velocities to segment and sequence skills from complex demonstration trajectories. Through the segmentation, we further align skill trajectories and hence leverage time as a powerful inductive bias. Third, we present a method to automatically detect relevant task parameters per skill from visual observations. Our approach enables learning complex manipulation tasks from just five demonstrations while using only RGB-D observations. Extensive experimental evaluations on RLBench demonstrate that our approach achieves state-of-the-art performance with 20-fold improved sample efficiency. Our policies generalize across different environments, object instances, and object positions, while the learned skills are reusable.
Read more7/19/2024

0
Interactive incremental learning of generalizable skills with local trajectory modulation
Markus Knauer, Alin Albu-Schaffer, Freek Stulp, Jo~ao Silv'erio
The problem of generalization in learning from demonstration (LfD) has received considerable attention over the years, particularly within the context of movement primitives, where a number of approaches have emerged. Recently, two important approaches have gained recognition. While one leverages via-points to adapt skills locally by modulating demonstrated trajectories, another relies on so-called task-parameterized models that encode movements with respect to different coordinate systems, using a product of probabilities for generalization. While the former are well-suited to precise, local modulations, the latter aim at generalizing over large regions of the workspace and often involve multiple objects. Addressing the quality of generalization by leveraging both approaches simultaneously has received little attention. In this work, we propose an interactive imitation learning framework that simultaneously leverages local and global modulations of trajectory distributions. Building on the kernelized movement primitives (KMP) framework, we introduce novel mechanisms for skill modulation from direct human corrective feedback. Our approach particularly exploits the concept of via-points to incrementally and interactively 1) improve the model accuracy locally, 2) add new objects to the task during execution and 3) extend the skill into regions where demonstrations were not provided. We evaluate our method on a bearing ring-loading task using a torque-controlled, 7-DoF, DLR SARA robot.
Read more9/10/2024
↗️
0
Formal Verification of Unknown Dynamical Systems via Gaussian Process Regression
John Skovbekk, Luca Laurenti, Eric Frew, Morteza Lahijanian
Leveraging autonomous systems in safety-critical scenarios requires verifying their behaviors in the presence of uncertainties and black-box components that influence the system dynamics. In this work, we develop a framework for verifying discrete-time dynamical systems with unmodelled dynamics and noisy measurements against temporal logic specifications from an input-output dataset. The verification framework employs Gaussian process (GP) regression to learn the unknown dynamics from the dataset and abstracts the continuous-space system as a finite-state, uncertain Markov decision process (MDP). This abstraction relies on space discretization and transition probability intervals that capture the uncertainty due to the error in GP regression by using reproducible kernel Hilbert space analysis as well as the uncertainty induced by discretization. The framework utilizes existing model checking tools for verification of the uncertain MDP abstraction against a given temporal logic specification. We establish the correctness of extending the verification results on the abstraction created from noisy measurements to the underlying system. We show that the computational complexity of the framework is polynomial in the size of the dataset and discrete abstraction. The complexity analysis illustrates a trade-off between the quality of the verification results and the computational burden to handle larger datasets and finer abstractions. Finally, we demonstrate the efficacy of our learning and verification framework on several case studies with linear, nonlinear, and switched dynamical systems.
Read more7/17/2024