Generalized Robot Learning Framework

0
Sign in to get full access
Overview
- Presents a generalized robot learning framework for reusing and transferring robotic skills
- Demonstrates how this framework can be applied to various tasks, including imitation learning, skill reuse, and generalization
- Highlights the potential for this approach to enable more efficient and versatile robot learning and behavior
Plain English Explanation
The paper describes a generalized robot learning framework that aims to make it easier for robots to learn and reuse a wide range of skills. This framework allows robots to learn from human demonstrations, transfer skills to new tasks, and generalize their capabilities.
By using this approach, the researchers hope to enable robots to become more versatile and adaptable, able to learn and apply a diverse set of skills efficiently. This could lead to robots that are better able to assist humans in a variety of tasks and environments.
Technical Explanation
The paper presents a generalized robot learning framework that builds on the concept of skill reuse. The framework consists of several key components:
- A skill representation that allows for the encoding and transfer of skills
- A skill composition mechanism for combining and adapting skills to new tasks
- A skill discovery process that enables the robot to identify relevant skills for a given task
The researchers demonstrate the effectiveness of this framework through experiments in imitation learning, skill reuse, and skill generalization. The results show that this approach can enable more efficient and versatile robot learning and behavior.
Critical Analysis
The paper presents a promising approach to robot learning, but it also acknowledges several limitations and areas for further research:
- The skill representation and composition mechanisms may be challenging to scale to highly complex skills or tasks.
- The skill discovery process relies on heuristics and may not always identify the most relevant skills for a given task.
- The framework has only been demonstrated in relatively simple scenarios, and its performance in more complex, real-world environments remains to be evaluated.
Additional research is needed to address these challenges and further refine the generalized robot learning framework. Exploring ways to learn more robust and transferable skills could also be a promising avenue for future work.
Conclusion
The generalized robot learning framework presented in this paper offers a novel approach to enabling robots to learn, reuse, and generalize a wide range of skills. By addressing key challenges in robot learning, this framework has the potential to contribute to the development of more versatile and adaptable robot systems that can better assist humans in a variety of tasks and environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generalized Robot Learning Framework
Jiahuan Yan, Zhouyang Hong, Yu Zhao, Yu Tian, Yunxin Liu, Travis Davies, Luhui Hu
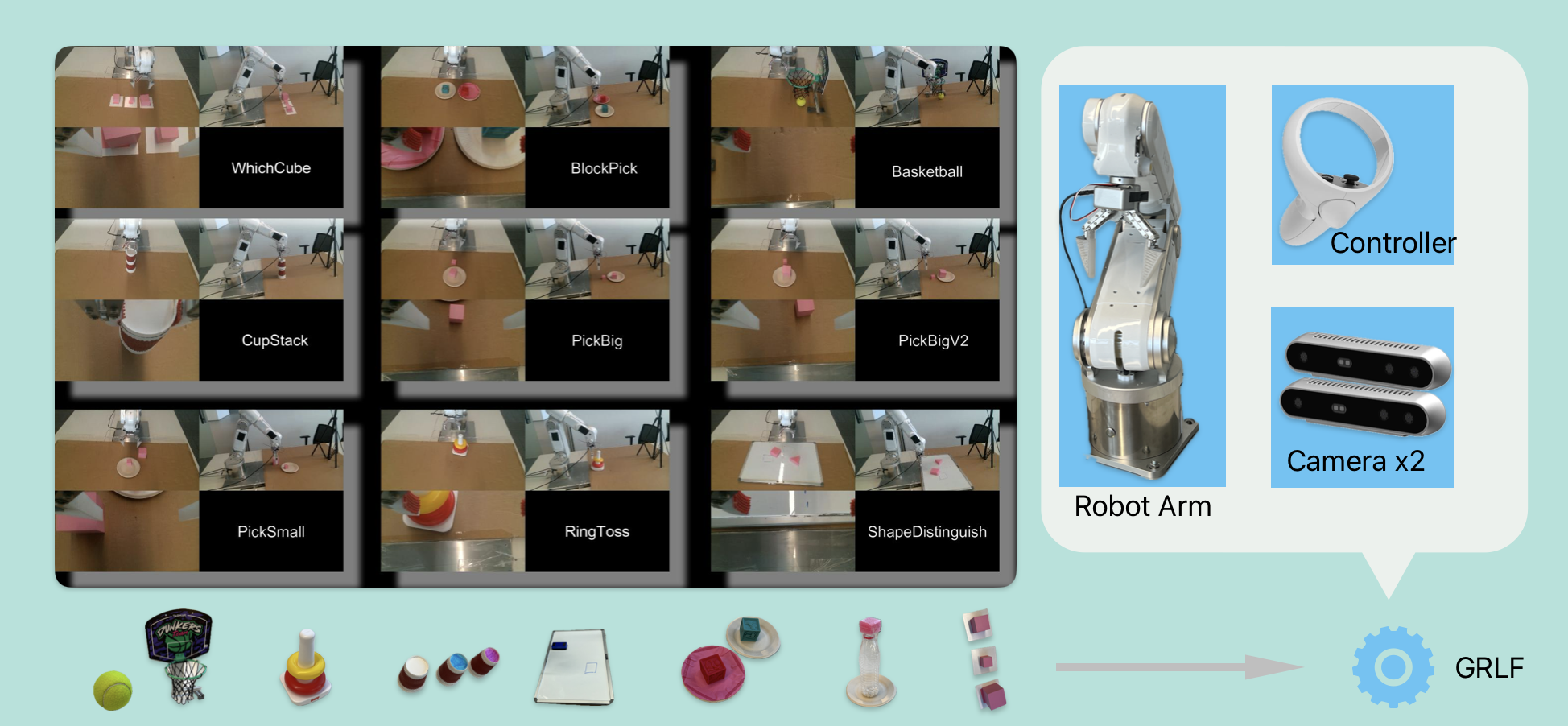
Imitation based robot learning has recently gained significant attention in the robotics field due to its theoretical potential for transferability and generalizability. However, it remains notoriously costly, both in terms of hardware and data collection, and deploying it in real-world environments demands meticulous setup of robots and precise experimental conditions. In this paper, we present a low-cost robot learning framework that is both easily reproducible and transferable to various robots and environments. We demonstrate that deployable imitation learning can be successfully applied even to industrial-grade robots, not just expensive collaborative robotic arms. Furthermore, our results show that multi-task robot learning is achievable with simple network architectures and fewer demonstrations than previously thought necessary. As the current evaluating method is almost subjective when it comes to real-world manipulation tasks, we propose Voting Positive Rate (VPR) - a novel evaluation strategy that provides a more objective assessment of performance. We conduct an extensive comparison of success rates across various self-designed tasks to validate our approach. To foster collaboration and support the robot learning community, we have open-sourced all relevant datasets and model checkpoints, available at huggingface.co/ZhiChengAI.
Read more9/19/2024
📉
0
A Framework for Learning and Reusing Robotic Skills
Brendan Hertel, Nhu Tran, Meriem Elkoudi, Reza Azadeh
In this paper, we present our work in progress towards creating a library of motion primitives. This library facilitates easier and more intuitive learning and reusing of robotic skills. Users can teach robots complex skills through Learning from Demonstration, which is automatically segmented into primitives and stored in clusters of similar skills. We propose a novel multimodal segmentation method as well as a novel trajectory clustering method. Then, when needed for reuse, we transform primitives into new environments using trajectory editing. We present simulated results for our framework with demonstrations taken on real-world robots.
Read more7/1/2024
🤯
0
Robotic Imitation of Human Actions
Josua Spisak, Matthias Kerzel, Stefan Wermter
Imitation can allow us to quickly gain an understanding of a new task. Through a demonstration, we can gain direct knowledge about which actions need to be performed and which goals they have. In this paper, we introduce a new approach to imitation learning that tackles the challenges of a robot imitating a human, such as the change in perspective and body schema. Our approach can use a single human demonstration to abstract information about the demonstrated task, and use that information to generalise and replicate it. We facilitate this ability by a new integration of two state-of-the-art methods: a diffusion action segmentation model to abstract temporal information from the demonstration and an open vocabulary object detector for spatial information. Furthermore, we refine the abstracted information and use symbolic reasoning to create an action plan utilising inverse kinematics, to allow the robot to imitate the demonstrated action.
Read more6/4/2024
🛸
0
Generalized Animal Imitator: Agile Locomotion with Versatile Motion Prior
Ruihan Yang, Zhuoqun Chen, Jianhan Ma, Chongyi Zheng, Yiyu Chen, Quan Nguyen, Xiaolong Wang
The agility of animals, particularly in complex activities such as running, turning, jumping, and backflipping, stands as an exemplar for robotic system design. Transferring this suite of behaviors to legged robotic systems introduces essential inquiries: How can a robot be trained to learn multiple locomotion behaviors simultaneously? How can the robot execute these tasks with a smooth transition? How to integrate these skills for wide-range applications? This paper introduces the Versatile Instructable Motion prior (VIM) - a Reinforcement Learning framework designed to incorporate a range of agile locomotion tasks suitable for advanced robotic applications. Our framework enables legged robots to learn diverse agile low-level skills by imitating animal motions and manually designed motions. Our Functionality reward guides the robot's ability to adopt varied skills, and our Stylization reward ensures that robot motions align with reference motions. Our evaluations of the VIM framework span both simulation environments and real-world deployment. To the best of our knowledge, this is the first work that allows a robot to concurrently learn diverse agile locomotion skills using a single learning-based controller in the real world. Further details and supportive media can be found at our project site: https://rchalyang.github.io/VIM
Read more4/23/2024