RoboCoder: Robotic Learning from Basic Skills to General Tasks with Large Language Models
2406.03757
0
0

Abstract
The emergence of Large Language Models (LLMs) has improved the prospects for robotic tasks. However, existing benchmarks are still limited to single tasks with limited generalization capabilities. In this work, we introduce a comprehensive benchmark and an autonomous learning framework, RoboCoder aimed at enhancing the generalization capabilities of robots in complex environments. Unlike traditional methods that focus on single-task learning, our research emphasizes the development of a general-purpose robotic coding algorithm that enables robots to leverage basic skills to tackle increasingly complex tasks. The newly proposed benchmark consists of 80 manually designed tasks across 7 distinct entities, testing the models' ability to learn from minimal initial mastery. Initial testing revealed that even advanced models like GPT-4 could only achieve a 47% pass rate in three-shot scenarios with humanoid entities. To address these limitations, the RoboCoder framework integrates Large Language Models (LLMs) with a dynamic learning system that uses real-time environmental feedback to continuously update and refine action codes. This adaptive method showed a remarkable improvement, achieving a 36% relative improvement. Our codes will be released.
Create account to get full access
Overview
- This paper, titled "RoboCoder: Robotic Learning from Basic Skills to General Tasks with Large Language Models," explores how large language models can be used to enable robots to learn a wide range of skills and tasks.
- The key idea is to leverage the broad knowledge and understanding captured in large language models to help robots learn complex behaviors beyond just basic skills.
- The paper covers related work in areas like integrating large language models with intelligent robots, using large language models for robotic adaptive tasks, and opportunities for large language models in human-robot interaction.
Plain English Explanation
The paper describes a system called "RoboCoder" that allows robots to learn a diverse set of skills and tasks by leveraging large language models. Large language models are AI systems that have been trained on massive amounts of text data, giving them broad knowledge and understanding that can be applied to various domains.
The key insight is that rather than having robots learn each skill or task from scratch, the knowledge and reasoning abilities of large language models can be used to bootstrap the robot's learning. This allows the robot to quickly pick up new skills and apply them flexibly to different situations, rather than being limited to a narrow set of predefined behaviors.
For example, a robot equipped with RoboCoder might be able to learn how to do chores like washing dishes or sweeping floors by tapping into the language model's understanding of household tasks and activities. It could then apply that same general knowledge to learn how to do other household tasks, or even extend its skills to new domains like gardening or office work.
The paper builds on related work in areas like using large language models as generalizable policies for embodied AI systems and learning robot skills from language-based reward signals. The key innovation here is the integration of large language models specifically to enable more flexible and general-purpose robotic learning.
Technical Explanation
The RoboCoder system is designed to leverage large language models to enable robots to learn a wide range of skills and tasks. The core idea is to use the broad knowledge and reasoning capabilities of language models to bootstrap the robot's learning, rather than having it start from scratch for each new skill or task.
The architecture of RoboCoder involves connecting the robot's perception and control systems to a large language model, which can then be used to generate guidance and instructions for the robot. For example, if the robot is asked to wash dishes, the language model can draw on its understanding of household tasks to provide step-by-step instructions and guidance to the robot.
The language model is trained on a diverse corpus of text data, which gives it broad knowledge about the world, language, and task-level concepts. This knowledge can then be applied flexibly to help the robot learn new skills and adapt them to different situations.
The paper describes several experiments where the RoboCoder system is used to enable a robot to learn a variety of tasks, ranging from basic manipulation skills to more complex household chores. The results show that the robots are able to quickly pick up new skills and apply them flexibly, outperforming baseline approaches that rely on more traditional machine learning techniques.
Critical Analysis
The RoboCoder approach represents an important step forward in enabling more flexible and general-purpose robotic learning. By leveraging the broad knowledge and reasoning capabilities of large language models, the system can help robots quickly acquire new skills and apply them in diverse contexts.
However, the paper also acknowledges some potential limitations and areas for further research. For example, the current implementation relies on a fixed language model, which may limit the robot's ability to adapt to new situations or learn completely novel skills. Exploring ways to continually update and fine-tune the language model based on the robot's experiences could be an interesting area for future work.
Additionally, the paper does not delve deeply into the potential safety and ethical implications of deploying robots with broad, language-based learning capabilities. As these systems become more capable, it will be important to carefully consider how to ensure they behave in ways that are aligned with human values and priorities.
Overall, the RoboCoder system represents an exciting advancement in the field of robotic learning, and the ideas presented in the paper could have significant implications for the future of intelligent robotics. However, further research and development will be needed to fully realize the potential of this approach and address any lingering challenges or concerns.
Conclusion
The "RoboCoder: Robotic Learning from Basic Skills to General Tasks with Large Language Models" paper presents a novel approach for enabling robots to learn a wide range of skills and tasks by leveraging large language models. By tapping into the broad knowledge and reasoning capabilities of these language models, the RoboCoder system can help robots quickly pick up new skills and apply them flexibly in diverse contexts.
This work builds on related research in areas like integrating large language models with intelligent robots, using large language models for robotic adaptive tasks, and opportunities for large language models in human-robot interaction. The key innovation of the RoboCoder system is its ability to harness language models to enable more flexible and general-purpose robotic learning, going beyond just basic skills to more complex, multifaceted tasks.
As the field of intelligent robotics continues to advance, approaches like RoboCoder could have significant implications for the types of tasks and behaviors that robots can learn and execute. However, it will be important to carefully consider the safety and ethical implications of these systems as they become more capable and autonomous. Overall, the ideas presented in this paper represent an exciting and promising direction for the future of robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Lifelong Robot Library Learning: Bootstrapping Composable and Generalizable Skills for Embodied Control with Language Models
Georgios Tziafas, Hamidreza Kasaei
0
0
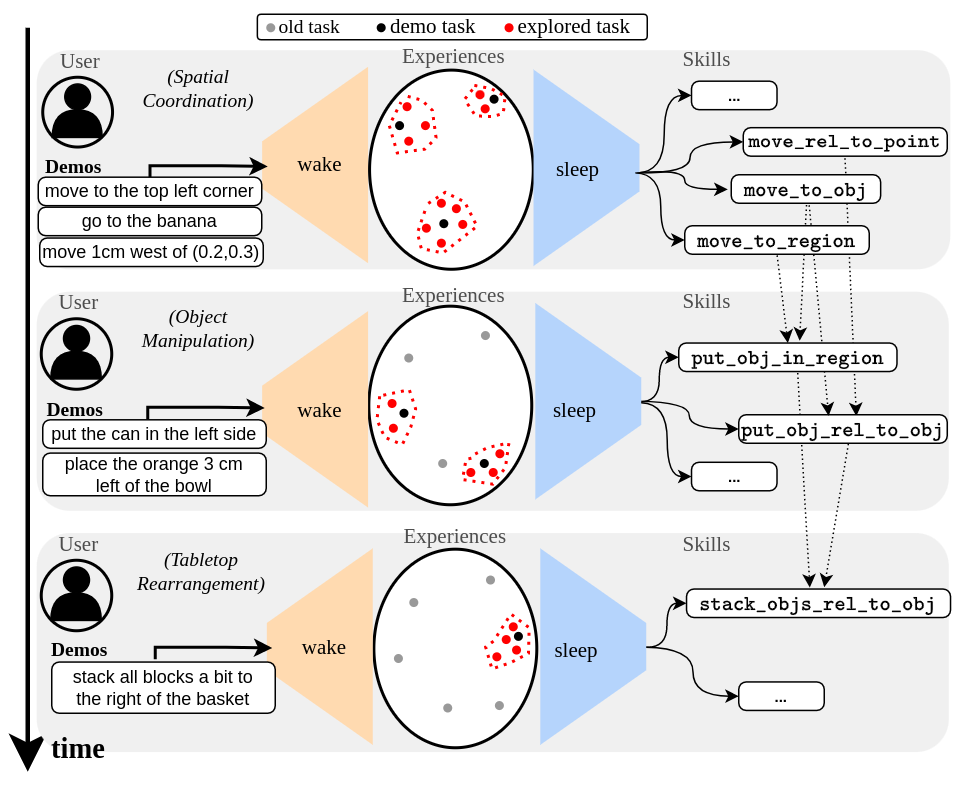
Large Language Models (LLMs) have emerged as a new paradigm for embodied reasoning and control, most recently by generating robot policy code that utilizes a custom library of vision and control primitive skills. However, prior arts fix their skills library and steer the LLM with carefully hand-crafted prompt engineering, limiting the agent to a stationary range of addressable tasks. In this work, we introduce LRLL, an LLM-based lifelong learning agent that continuously grows the robot skill library to tackle manipulation tasks of ever-growing complexity. LRLL achieves this with four novel contributions: 1) a soft memory module that allows dynamic storage and retrieval of past experiences to serve as context, 2) a self-guided exploration policy that proposes new tasks in simulation, 3) a skill abstractor that distills recent experiences into new library skills, and 4) a lifelong learning algorithm for enabling human users to bootstrap new skills with minimal online interaction. LRLL continuously transfers knowledge from the memory to the library, building composable, general and interpretable policies, while bypassing gradient-based optimization, thus relieving the learner from catastrophic forgetting. Empirical evaluation in a simulated tabletop environment shows that LRLL outperforms end-to-end and vanilla LLM approaches in the lifelong setup while learning skills that are transferable to the real world. Project material will become available at the webpage https://gtziafas.github.io/LRLL_project.
6/28/2024
💬
A Survey on Integration of Large Language Models with Intelligent Robots
Yeseung Kim, Dohyun Kim, Jieun Choi, Jisang Park, Nayoung Oh, Daehyung Park
0
0
In recent years, the integration of large language models (LLMs) has revolutionized the field of robotics, enabling robots to communicate, understand, and reason with human-like proficiency. This paper explores the multifaceted impact of LLMs on robotics, addressing key challenges and opportunities for leveraging these models across various domains. By categorizing and analyzing LLM applications within core robotics elements -- communication, perception, planning, and control -- we aim to provide actionable insights for researchers seeking to integrate LLMs into their robotic systems. Our investigation focuses on LLMs developed post-GPT-3.5, primarily in text-based modalities while also considering multimodal approaches for perception and control. We offer comprehensive guidelines and examples for prompt engineering, facilitating beginners' access to LLM-based robotics solutions. Through tutorial-level examples and structured prompt construction, we illustrate how LLM-guided enhancements can be seamlessly integrated into robotics applications. This survey serves as a roadmap for researchers navigating the evolving landscape of LLM-driven robotics, offering a comprehensive overview and practical guidance for harnessing the power of language models in robotics development.
6/26/2024
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
0
0
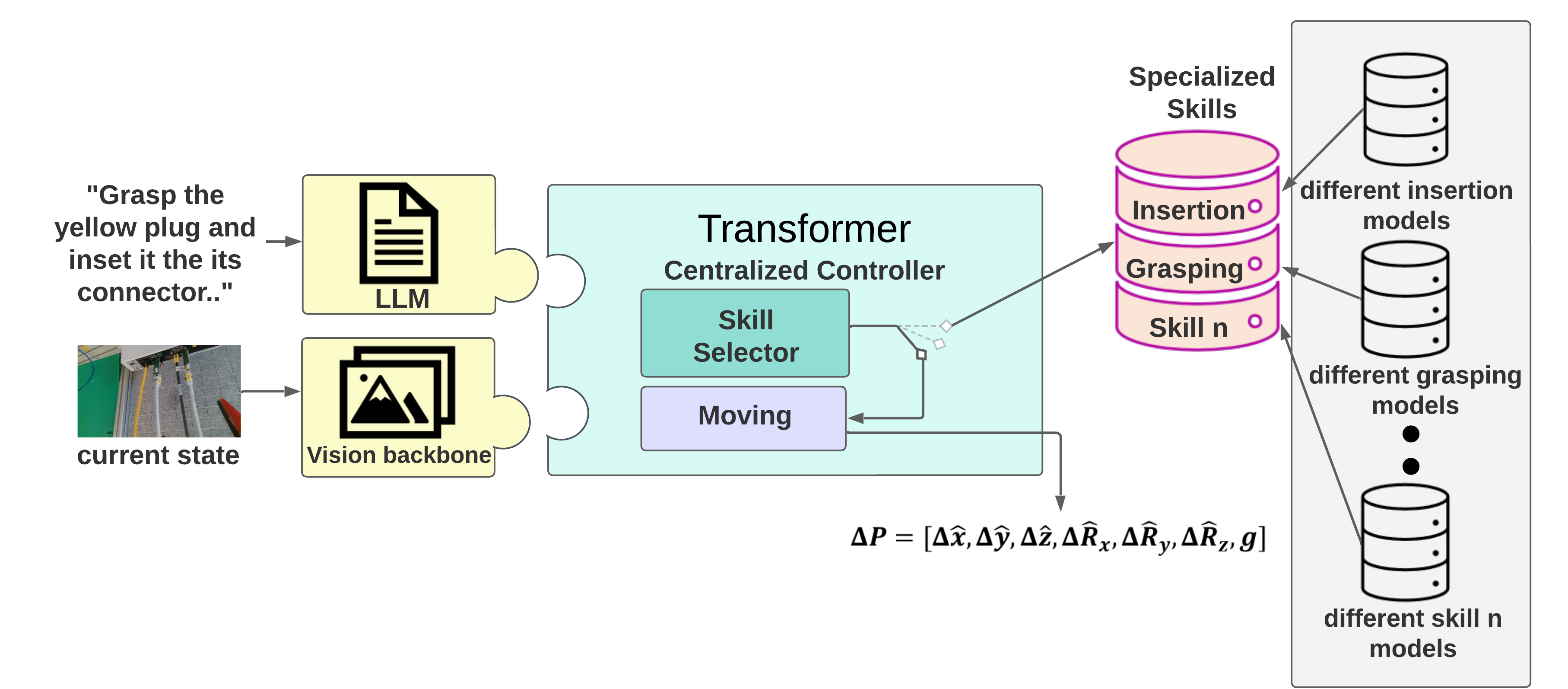
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
6/26/2024

Language Models as Zero-Shot Trajectory Generators
Teyun Kwon, Norman Di Palo, Edward Johns
0
0
Large Language Models (LLMs) have recently shown promise as high-level planners for robots when given access to a selection of low-level skills. However, it is often assumed that LLMs do not possess sufficient knowledge to be used for the low-level trajectories themselves. In this work, we address this assumption thoroughly, and investigate if an LLM (GPT-4) can directly predict a dense sequence of end-effector poses for manipulation tasks, when given access to only object detection and segmentation vision models. We designed a single, task-agnostic prompt, without any in-context examples, motion primitives, or external trajectory optimisers. Then we studied how well it can perform across 30 real-world language-based tasks, such as open the bottle cap and wipe the plate with the sponge, and we investigated which design choices in this prompt are the most important. Our conclusions raise the assumed limit of LLMs for robotics, and we reveal for the first time that LLMs do indeed possess an understanding of low-level robot control sufficient for a range of common tasks, and that they can additionally detect failures and then re-plan trajectories accordingly. Videos, prompts, and code are available at: https://www.robot-learning.uk/language-models-trajectory-generators.
6/19/2024