Generative Learning for Simulation of US Army Vehicle Faults

0

Sign in to get full access
Overview
- This paper explores using generative learning to simulate faults in US Army vehicles.
- The goal is to develop models that can generate realistic fault data to aid in vehicle diagnostics and prognostics.
- The research involves training generative adversarial networks (GANs) on real-world vehicle fault data.
Plain English Explanation
The researchers in this paper are investigating how machine learning models can be used to simulate faults that occur in US Army vehicles. Vehicles, especially military ones, can experience all sorts of mechanical and electrical issues during normal use. Being able to accurately predict and diagnose these faults is important for maintaining readiness and reducing downtime.
The researchers trained generative adversarial networks (GANs) on real data about faults that have occurred in Army vehicles. GANs are a type of machine learning model that can generate new, realistic-looking data that is similar to the training data.
The goal is for these GAN models to be able to produce synthetic fault data that is indistinguishable from real faults. This could be valuable for testing diagnostic algorithms and predicting how faults may propagate without needing to wait for real faults to occur.
Technical Explanation
The researchers trained generative adversarial networks (GANs) on real-world fault data collected from US Army vehicles. GANs are a type of machine learning model that can generate new, realistic-looking data that is similar to a given training dataset.
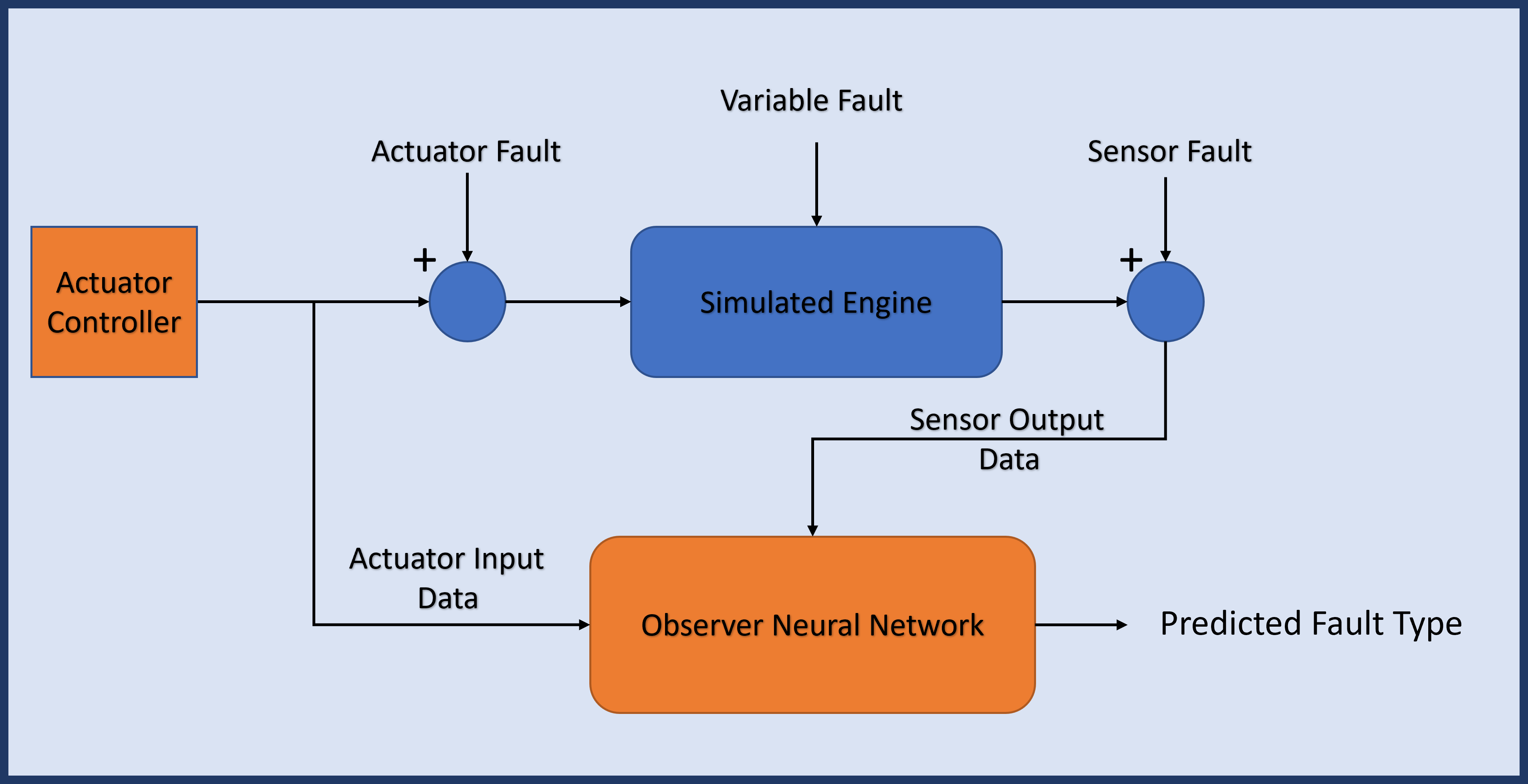
The GAN architecture consisted of a generator network that learned to produce synthetic fault data, and a discriminator network that attempted to distinguish the generated data from the real fault data. These two networks were trained in an adversarial fashion, with the generator trying to fool the discriminator, and the discriminator trying to detect the generated samples.
Through this training process, the generator network was able to learn the underlying statistical patterns in the real fault data and generate new samples that closely matched the characteristics of the original dataset. The researchers evaluated the quality of the generated fault data using both quantitative metrics and expert human assessments.
The results showed that the GAN-generated fault data was highly realistic and could be a valuable tool for simulating vehicle faults for diagnostic algorithm development and testing. The researchers note that further work is needed to scale the approach to handle the full complexity of real-world vehicle systems.
Critical Analysis
The researchers acknowledge several limitations and areas for future work in this paper. One key limitation is that the GAN models were trained on a relatively small dataset of real-world vehicle faults. Scaling the approach to handle the full breadth of potential faults in complex military vehicles may require significantly larger and more diverse training datasets.
Additionally, the researchers only evaluated the generated fault data using high-level statistical metrics and expert assessments. More rigorous testing of the generated data's utility for specific diagnostic and prognostic applications would be valuable to fully understand the practical implications of this work.
The researchers also note that the GAN architecture and training process could likely be further optimized to improve the fidelity and diversity of the generated fault data. Exploring alternative generative modeling approaches or incorporating domain-specific knowledge into the models could lead to additional performance gains.
Despite these limitations, this research represents an important step towards leveraging machine learning to enable more effective simulation and testing of vehicle fault scenarios. As autonomous and semi-autonomous vehicle systems become more prevalent, the ability to accurately predict and diagnose faults will only grow in importance.
Conclusion
This paper explores the use of generative adversarial networks (GANs) to simulate realistic fault data for US Army vehicles. By training GAN models on real-world fault data, the researchers were able to generate synthetic fault samples that closely matched the characteristics of the original dataset.
This technique could be valuable for testing diagnostic algorithms and predicting how faults may propagate without needing to wait for real faults to occur. While further research is needed to scale the approach and rigorously evaluate its practical applications, this work represents an important step towards leveraging machine learning to enhance vehicle maintenance and readiness.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Generative Learning for Simulation of US Army Vehicle Faults
Patrick Kuiper, Sirui Lin, Jose Blanchet, Vahid Tarokh
We develop a novel generative model to simulate vehicle health and forecast faults, conditioned on practical operational considerations. The model, trained on data from the US Army's Predictive Logistics program, aims to support predictive maintenance. It forecasts faults far enough in advance to execute a maintenance intervention before a breakdown occurs. The model incorporates real-world factors that affect vehicle health. It also allows us to understand the vehicle's condition by analyzing operating data, and characterizing each vehicle into discrete states. Importantly, the model predicts the time to first fault with high accuracy. We compare its performance to other models and demonstrate its successful training.
Read more7/31/2024

0
Solving Motion Planning Tasks with a Scalable Generative Model
Yihan Hu, Siqi Chai, Zhening Yang, Jingyu Qian, Kun Li, Wenxin Shao, Haichao Zhang, Wei Xu, Qiang Liu
As autonomous driving systems being deployed to millions of vehicles, there is a pressing need of improving the system's scalability, safety and reducing the engineering cost. A realistic, scalable, and practical simulator of the driving world is highly desired. In this paper, we present an efficient solution based on generative models which learns the dynamics of the driving scenes. With this model, we can not only simulate the diverse futures of a given driving scenario but also generate a variety of driving scenarios conditioned on various prompts. Our innovative design allows the model to operate in both full-Autoregressive and partial-Autoregressive modes, significantly improving inference and training speed without sacrificing generative capability. This efficiency makes it ideal for being used as an online reactive environment for reinforcement learning, an evaluator for planning policies, and a high-fidelity simulator for testing. We evaluated our model against two real-world datasets: the Waymo motion dataset and the nuPlan dataset. On the simulation realism and scene generation benchmark, our model achieves the state-of-the-art performance. And in the planning benchmarks, our planner outperforms the prior arts. We conclude that the proposed generative model may serve as a foundation for a variety of motion planning tasks, including data generation, simulation, planning, and online training. Source code is public at https://github.com/HorizonRobotics/GUMP/
Read more7/4/2024
0
AI-driven Transformer Model for Fault Prediction in Non-Linear Dynamic Automotive System
Priyanka Kumar
Fault detection in automotive engine systems is one of the most promising research areas. Several works have been done in the field of model-based fault diagnosis. Many researchers have discovered more advanced statistical methods and algorithms for better fault detection on any automotive dynamic engine system. The gas turbines/diesel engines produce highly complex and huge data which are highly non-linear. So, researchers should come up with an automated system that is more resilient and robust enough to handle this huge, complex data in highly non-linear dynamic automotive systems. Here, I present an AI-based fault classification and prediction model in the diesel engine that can be applied to any highly non-linear dynamic automotive system. The main contribution of this paper is the AI-based Transformer fault classification and prediction model in the diesel engine concerning the worldwide harmonic light vehicle test procedure (WLTP) driving cycle. This model used 27 input dimensions, 64 hidden dimensions with 2 layers, and 9 heads to create a classifier with 12 output heads (one for fault-free data and 11 different fault types). This model was trained on the UTSA Arc High-Performance Compute (HPC) cluster with 5 NVIDIA V100 GPUs, 40-core CPUs, and 384GB RAM and achieved 70.01 % accuracy on a held test set.
Read more8/26/2024
0
Augmenting train maintenance technicians with automated incident diagnostic suggestions
Georges Tod, Jean Bruggeman, Evert Bevernage, Pieter Moelans, Walter Eeckhout, Jean-Luc Glineur
Train operational incidents are so far diagnosed individually and manually by train maintenance technicians. In order to assist maintenance crews in their responsiveness and task prioritization, a learning machine is developed and deployed in production to suggest diagnostics to train technicians on their phones, tablets or laptops as soon as a train incident is declared. A feedback loop allows to take into account the actual diagnose by designated train maintenance experts to refine the learning machine. By formulating the problem as a discrete set classification task, feature engineering methods are proposed to extract physically plausible sets of events from traces generated on-board railway vehicles. The latter feed an original ensemble classifier to class incidents by their potential technical cause. Finally, the resulting model is trained and validated using real operational data and deployed on a cloud platform. Future work will explore how the extracted sets of events can be used to avoid incidents by assisting human experts in the creation predictive maintenance alerts.
Read more8/21/2024