GeoCalib: Learning Single-image Calibration with Geometric Optimization

0
Sign in to get full access
Overview
- The paper presents GeoCalib, a novel method for single-image camera calibration using geometric optimization.
- GeoCalib learns to estimate camera intrinsic parameters directly from a single input image, without requiring any additional information or manual intervention.
- The approach leverages geometric constraints and differentiable rendering to optimize the camera parameters in an end-to-end manner.
Plain English Explanation
GeoCalib is a new technique for calibrating a camera using just a single photograph. Traditionally, camera calibration involved complex processes like imaging a special calibration pattern or using multiple images. GeoCalib can estimate the camera's intrinsic parameters, like the focal length and lens distortion, directly from a single input image.
The key idea is to use the geometric structure of the scene depicted in the image, along with differentiable rendering techniques, to optimize the camera parameters in an end-to-end manner. This means the system can automatically learn the optimal camera calibration without any manual intervention or additional information beyond the single input image.
Technical Explanation
GeoCalib is a deep learning-based approach for estimating a camera's intrinsic parameters from a single input image. Unlike traditional calibration methods that require specialized equipment or multiple images, GeoCalib can learn the optimal camera calibration directly from a single photograph.
The core innovation is the use of geometric constraints and differentiable rendering to optimize the camera parameters in an end-to-end fashion. The system takes a single image as input and predicts the camera's intrinsic parameters, including the focal length, principal point, and lens distortion coefficients. It then uses these predicted parameters to render a 3D scene that is geometrically consistent with the input image. By minimizing the difference between the rendered and observed images, GeoCalib can learn the optimal camera calibration.
Critical Analysis
The GeoCalib paper presents a promising approach for single-image camera calibration, but it also acknowledges some limitations.
One potential issue is that the method assumes the input image contains sufficient geometric information to constrain the camera parameters. In scenes with limited structure or repetitive patterns, the optimization process may struggle to converge to the correct solution.
Additionally, the paper notes that GeoCalib is currently limited to estimating only the intrinsic camera parameters, and does not address the estimation of extrinsic parameters (camera pose) or handle scenes with multiple cameras.
Further research could explore ways to make the method more robust to challenging scenes, as well as extend it to handle more complex camera configurations and calibration scenarios.
Conclusion
GeoCalib represents an important step forward in the field of camera calibration by enabling accurate estimation of intrinsic parameters from a single input image. This could have significant implications for a wide range of computer vision and augmented reality applications, as it eliminates the need for specialized equipment or multiple images.
While the current method has some limitations, the paper's core insights around the use of geometric constraints and differentiable rendering open up exciting avenues for future research and development in this area.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GeoCalib: Learning Single-image Calibration with Geometric Optimization
Alexander Veicht, Paul-Edouard Sarlin, Philipp Lindenberger, Marc Pollefeys
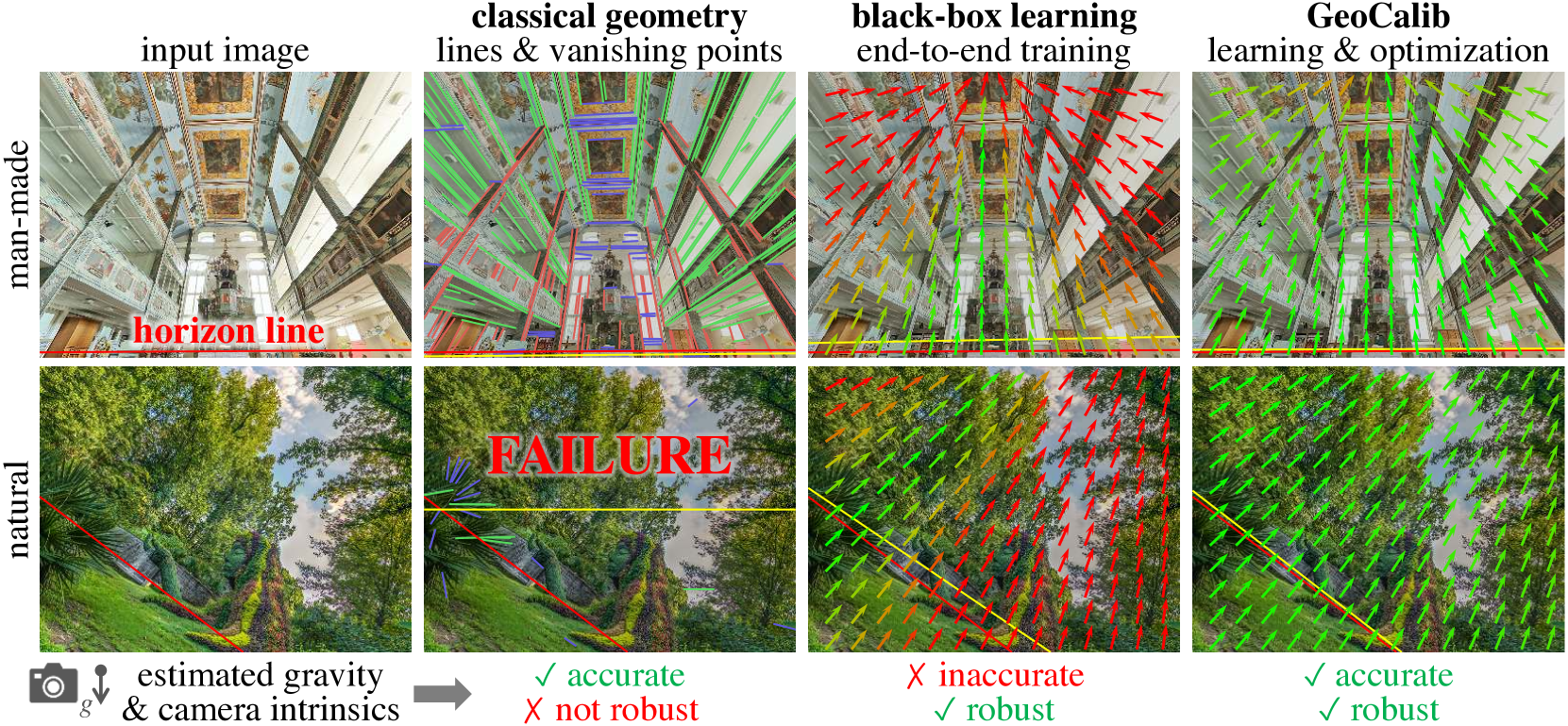
From a single image, visual cues can help deduce intrinsic and extrinsic camera parameters like the focal length and the gravity direction. This single-image calibration can benefit various downstream applications like image editing and 3D mapping. Current approaches to this problem are based on either classical geometry with lines and vanishing points or on deep neural networks trained end-to-end. The learned approaches are more robust but struggle to generalize to new environments and are less accurate than their classical counterparts. We hypothesize that they lack the constraints that 3D geometry provides. In this work, we introduce GeoCalib, a deep neural network that leverages universal rules of 3D geometry through an optimization process. GeoCalib is trained end-to-end to estimate camera parameters and learns to find useful visual cues from the data. Experiments on various benchmarks show that GeoCalib is more robust and more accurate than existing classical and learned approaches. Its internal optimization estimates uncertainties, which help flag failure cases and benefit downstream applications like visual localization. The code and trained models are publicly available at https://github.com/cvg/GeoCalib.
Read more9/11/2024
🤿
2
Deep Learning for Camera Calibration and Beyond: A Survey
Kang Liao, Lang Nie, Shujuan Huang, Chunyu Lin, Jing Zhang, Yao Zhao, Moncef Gabbouj, Dacheng Tao
Camera calibration involves estimating camera parameters to infer geometric features from captured sequences, which is crucial for computer vision and robotics. However, conventional calibration is laborious and requires dedicated collection. Recent efforts show that learning-based solutions have the potential to be used in place of the repeatability works of manual calibrations. Among these solutions, various learning strategies, networks, geometric priors, and datasets have been investigated. In this paper, we provide a comprehensive survey of learning-based camera calibration techniques, by analyzing their strengths and limitations. Our main calibration categories include the standard pinhole camera model, distortion camera model, cross-view model, and cross-sensor model, following the research trend and extended applications. As there is no benchmark in this community, we collect a holistic calibration dataset that can serve as a public platform to evaluate the generalization of existing methods. It comprises both synthetic and real-world data, with images and videos captured by different cameras in diverse scenes. Toward the end of this paper, we discuss the challenges and provide further research directions. To our knowledge, this is the first survey for the learning-based camera calibration (spanned 8 years). The summarized methods, datasets, and benchmarks are available and will be regularly updated at https://github.com/KangLiao929/Awesome-Deep-Camera-Calibration.
Read more6/5/2024
🌀
0
Single-image camera calibration with model-free distortion correction
Katia Genovese
Camera calibration is a process of paramount importance in computer vision applications that require accurate quantitative measurements. The popular method developed by Zhang relies on the use of a large number of images of a planar grid of fiducial points captured in multiple poses. Although flexible and easy to implement, Zhang's method has some limitations. The simultaneous optimization of the entire parameter set, including the coefficients of a predefined distortion model, may result in poor distortion correction at the image boundaries or in miscalculation of the intrinsic parameters, even with a reasonably small reprojection error. Indeed, applications involving image stitching (e.g. multi-camera systems) require accurate mapping of distortion up to the outermost regions of the image. Moreover, intrinsic parameters affect the accuracy of camera pose estimation, which is fundamental for applications such as vision servoing in robot navigation and automated assembly. This paper proposes a method for estimating the complete set of calibration parameters from a single image of a planar speckle pattern covering the entire sensor. The correspondence between image points and physical points on the calibration target is obtained using Digital Image Correlation. The effective focal length and the extrinsic parameters are calculated separately after a prior evaluation of the principal point. At the end of the procedure, a dense and uniform model-free distortion map is obtained over the entire image. Synthetic data with different noise levels were used to test the feasibility of the proposed method and to compare its metrological performance with Zhang's method. Real-world tests demonstrate the potential of the developed method to reveal aspects of the image formation that are hidden by averaging over multiple images.
Read more6/26/2024
🧠
0
New!UniCal: Unified Neural Sensor Calibration
Ze Yang, George Chen, Haowei Zhang, Kevin Ta, Ioan Andrei B^arsan, Daniel Murphy, Sivabalan Manivasagam, Raquel Urtasun
Self-driving vehicles (SDVs) require accurate calibration of LiDARs and cameras to fuse sensor data accurately for autonomy. Traditional calibration methods typically leverage fiducials captured in a controlled and structured scene and compute correspondences to optimize over. These approaches are costly and require substantial infrastructure and operations, making it challenging to scale for vehicle fleets. In this work, we propose UniCal, a unified framework for effortlessly calibrating SDVs equipped with multiple LiDARs and cameras. Our approach is built upon a differentiable scene representation capable of rendering multi-view geometrically and photometrically consistent sensor observations. We jointly learn the sensor calibration and the underlying scene representation through differentiable volume rendering, utilizing outdoor sensor data without the need for specific calibration fiducials. This drive-and-calibrate approach significantly reduces costs and operational overhead compared to existing calibration systems, enabling efficient calibration for large SDV fleets at scale. To ensure geometric consistency across observations from different sensors, we introduce a novel surface alignment loss that combines feature-based registration with neural rendering. Comprehensive evaluations on multiple datasets demonstrate that UniCal outperforms or matches the accuracy of existing calibration approaches while being more efficient, demonstrating the value of UniCal for scalable calibration.
Read more9/30/2024