GERA: Geometric Embedding for Efficient Point Registration Analysis

0

Sign in to get full access
Overview
- The paper proposes a new approach called GERA (Geometric Embedding for Efficient Point Registration Analysis) for point cloud registration.
- Point cloud registration is the process of aligning multiple 3D point clouds to a common coordinate system, which is a crucial task in many applications like robotics, computer vision, and 3D reconstruction.
- GERA learns a geometric embedding of the point clouds that captures their underlying structure, enabling efficient and accurate point cloud registration.
Plain English Explanation
GERA is a method for aligning 3D point clouds, which are collections of 3D data points that represent the surface of an object or environment. Registering point clouds is important for applications like creating 3D models from multiple scans or enabling robots to navigate and understand their surroundings.
The key idea behind GERA is to learn a special representation or "embedding" of the point cloud that captures its underlying geometric structure. This embedding contains information about the shape and orientation of the point cloud, which can then be used to efficiently and accurately align it with other point clouds.
The advantage of this approach is that it can register point clouds faster and more accurately than previous methods, which is important for real-time applications like robot navigation or 3D modeling. By learning a compact, geometry-aware representation of the point cloud, GERA can quickly find the best way to line up multiple scans of an object or environment.
Technical Explanation
The GERA model consists of two main components: a point cloud encoder and a registration module.
The point cloud encoder takes the input point cloud and learns a low-dimensional geometric embedding that captures the underlying structure of the 3D data. This is done using a neural network architecture that hierarchically extracts and aggregates geometric features at multiple scales.
The registration module then uses this learned embedding to efficiently align the point cloud with a target point cloud. It does this by finding the optimal rigid transformation (rotation and translation) that brings the source point cloud into alignment with the target.
The key innovation of GERA is this tight integration between the learned geometric representation and the registration process. By embedding the point cloud in a way that preserves its underlying geometry, the registration module can quickly and accurately find the best alignment, outperforming previous approaches that treat the point clouds more independently.
The paper evaluates GERA on standard 3D registration benchmarks and demonstrates significant improvements in both speed and accuracy compared to state-of-the-art methods.
Critical Analysis
The authors acknowledge several limitations of the GERA approach. First, the performance of the method may degrade in the presence of significant noise or missing data in the input point clouds. The paper suggests that incorporating more robust geometric features or using additional refinement steps could help address this issue.
Additionally, the registration module in GERA is designed to find the optimal rigid transformation between point clouds. This may not be sufficient for non-rigid registration tasks, where the alignment involves more complex deformations. Extending GERA to handle non-rigid transformations could broaden its applicability.
The authors also note that the performance of GERA is dependent on the quality of the learned geometric embedding. Further research into more powerful encoding architectures or better training strategies could potentially improve the embedding and lead to even better registration results.
Overall, GERA represents a promising approach to the important problem of point cloud registration, but there are opportunities for continued research and development to address its current limitations.
Conclusion
The GERA method proposes a novel way to approach the problem of point cloud registration by learning a geometric embedding of the input data. This embedding captures the underlying structure of the 3D points, enabling efficient and accurate alignment of point clouds. The technical evaluation shows significant improvements over existing methods, highlighting the value of this integrated approach to representation learning and registration.
The potential applications of GERA span areas like robotics, 3D reconstruction, and virtual/augmented reality, where the ability to quickly and reliably register point clouds is crucial. While the method has some limitations, the research presented in this paper represents an important step forward in addressing this fundamental problem in 3D data processing.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!GERA: Geometric Embedding for Efficient Point Registration Analysis
Geng Li, Haozhi Cao, Mingyang Liu, Shenghai Yuan, Jianfei Yang
Point cloud registration aims to provide estimated transformations to align point clouds, which plays a crucial role in pose estimation of various navigation systems, such as surgical guidance systems and autonomous vehicles. Despite the impressive performance of recent models on benchmark datasets, many rely on complex modules like KPConv and Transformers, which impose significant computational and memory demands. These requirements hinder their practical application, particularly in resource-constrained environments such as mobile robotics. In this paper, we propose a novel point cloud registration network that leverages a pure MLP architecture, constructing geometric information offline. This approach eliminates the computational and memory burdens associated with traditional complex feature extractors and significantly reduces inference time and resource consumption. Our method is the first to replace 3D coordinate inputs with offline-constructed geometric encoding, improving generalization and stability, as demonstrated by Maximum Mean Discrepancy (MMD) comparisons. This efficient and accurate geometric representation marks a significant advancement in point cloud analysis, particularly for applications requiring fast and reliability.
Read more10/2/2024
🤖
0
New!LoGDesc: Local geometric features aggregation for robust point cloud registration
Karim Slimani, Brahim Tamadazte, Catherine Achard
This paper introduces a new hybrid descriptor for 3D point matching and point cloud registration, combining local geometrical properties and learning-based feature propagation for each point's neighborhood structure description. The proposed architecture first extracts prior geometrical information by computing each point's planarity, anisotropy, and omnivariance using a Principal Components Analysis (PCA). This prior information is completed by a descriptor based on the normal vectors estimated thanks to constructing a neighborhood based on triangles. The final geometrical descriptor is propagated between the points using local graph convolutions and attention mechanisms. The new feature extractor is evaluated on ModelNet40, Bunny Stanford dataset, KITTI and MVP (Multi-View Partial)-RG for point cloud registration and shows interesting results, particularly on noisy and low overlapping point clouds.
Read more10/4/2024
0
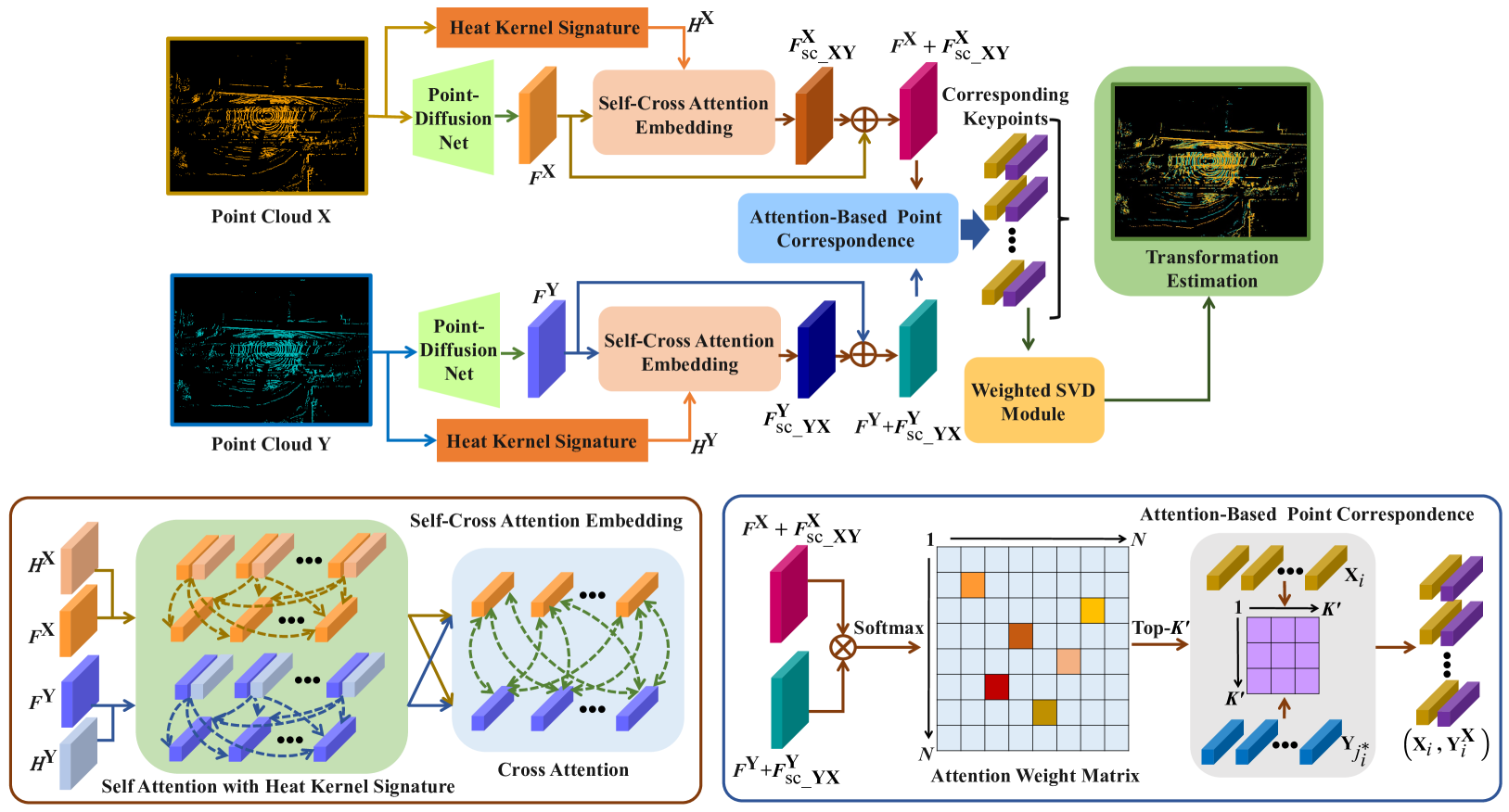
PointDifformer: Robust Point Cloud Registration With Neural Diffusion and Transformer
Rui She, Qiyu Kang, Sijie Wang, Wee Peng Tay, Kai Zhao, Yang Song, Tianyu Geng, Yi Xu, Diego Navarro Navarro, Andreas Hartmannsgruber
Point cloud registration is a fundamental technique in 3-D computer vision with applications in graphics, autonomous driving, and robotics. However, registration tasks under challenging conditions, under which noise or perturbations are prevalent, can be difficult. We propose a robust point cloud registration approach that leverages graph neural partial differential equations (PDEs) and heat kernel signatures. Our method first uses graph neural PDE modules to extract high dimensional features from point clouds by aggregating information from the 3-D point neighborhood, thereby enhancing the robustness of the feature representations. Then, we incorporate heat kernel signatures into an attention mechanism to efficiently obtain corresponding keypoints. Finally, a singular value decomposition (SVD) module with learnable weights is used to predict the transformation between two point clouds. Empirical experiments on a 3-D point cloud dataset demonstrate that our approach not only achieves state-of-the-art performance for point cloud registration but also exhibits better robustness to additive noise or 3-D shape perturbations.
Read more4/23/2024

0
Masked Generative Extractor for Synergistic Representation and 3D Generation of Point Clouds
Hongliang Zeng, Ping Zhang, Fang Li, Jiahua Wang, Tingyu Ye, Pengteng Guo
Representation and generative learning, as reconstruction-based methods, have demonstrated their potential for mutual reinforcement across various domains. In the field of point cloud processing, although existing studies have adopted training strategies from generative models to enhance representational capabilities, these methods are limited by their inability to genuinely generate 3D shapes. To explore the benefits of deeply integrating 3D representation learning and generative learning, we propose an innovative framework called textit{Point-MGE}. Specifically, this framework first utilizes a vector quantized variational autoencoder to reconstruct a neural field representation of 3D shapes, thereby learning discrete semantic features of point patches. Subsequently, we design a sliding masking ratios to smooth the transition from representation learning to generative learning. Moreover, our method demonstrates strong generalization capability in learning high-capacity models, achieving new state-of-the-art performance across multiple downstream tasks. In shape classification, Point-MGE achieved an accuracy of 94.2% (+1.0%) on the ModelNet40 dataset and 92.9% (+5.5%) on the ScanObjectNN dataset. Experimental results also confirmed that Point-MGE can generate high-quality 3D shapes in both unconditional and conditional settings.
Read more8/16/2024