Goal Estimation-based Adaptive Shared Control for Brain-Machine Interfaces Remote Robot Navigation

0
Sign in to get full access
Overview
- The paper proposes a goal estimation-based adaptive shared control method for brain-machine interface (BMI) systems to control remote robots during navigation tasks.
- The method aims to adaptively balance the control between the user's brain signals and the robot's autonomous navigation capabilities, based on the user's intended goal.
- The proposed approach is evaluated through simulation experiments and compared to other shared control strategies.
Plain English Explanation
The paper describes a way to let people control a remote robot using their brain signals, while also having the robot help out and make its own decisions. The key idea is that the robot can try to figure out what the person is trying to do, and then adjust how much control the person has versus how much the robot has.
For example, if the person is trying to navigate the robot to a specific location, the robot can use that information to take more control and help guide the robot there efficiently. But if the person is trying to do something more complex, like avoid obstacles, the robot can give more control back to the person.
This adaptive shared control approach is designed to make it easier for people to control the robot using just their brain signals, which can be challenging. By having the robot help out when it can, it should improve the overall performance and make the system more user-friendly.
The researchers tested this approach in computer simulations and compared it to other ways of sharing control between the person and the robot. The results suggest this goal-estimation based adaptive approach can be a effective way to combine a person's brain control with the robot's autonomous capabilities.
Technical Explanation
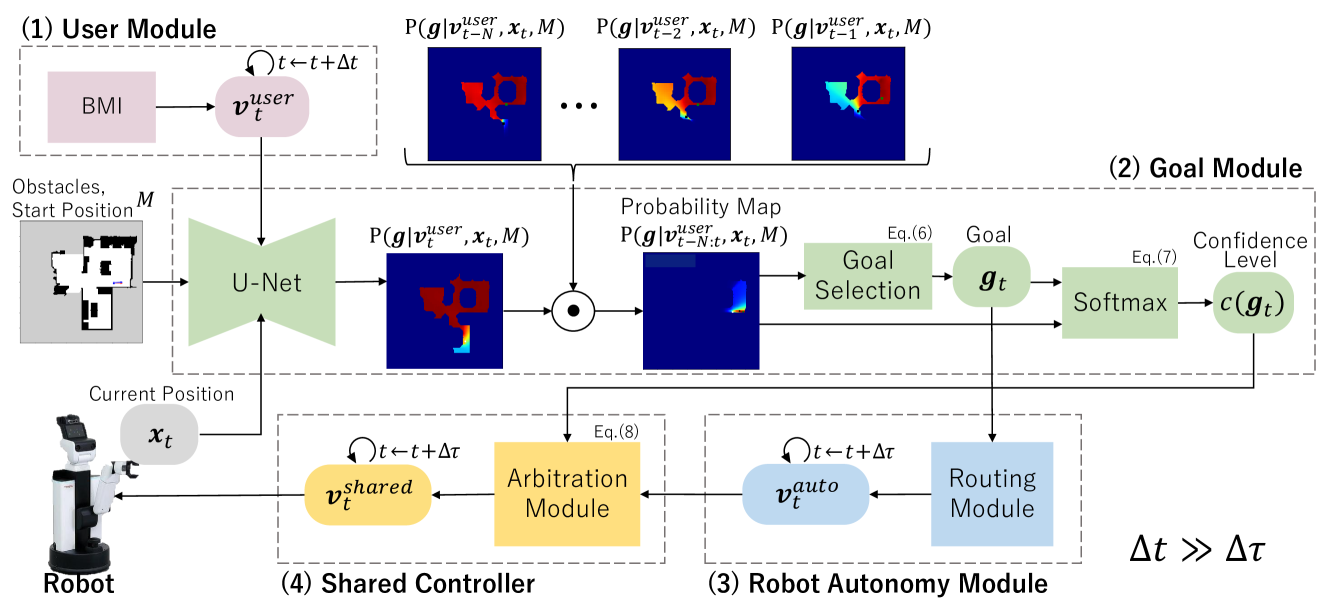
The paper presents a goal estimation-based adaptive shared control method for BMI-controlled remote robot navigation. The key components are:
- Goal Estimation: The robot uses a neural network to estimate the user's intended goal location based on their brain activity and the current robot state.
- Adaptive Shared Control: The control authority between the user and robot is dynamically adjusted based on the goal estimation. When the goal is clear, the robot takes more control. When the user's intent is uncertain, more control is given to the user.
- Optimization-based Navigation: The robot uses an optimization-based navigation planner to efficiently reach the estimated goal location, while considering obstacles and other constraints.
The proposed approach is evaluated through simulation experiments involving a user controlling a mobile robot in a cluttered environment. It is compared to other shared control strategies that do not adapt the level of shared control.
The results show the goal estimation-based adaptive shared control can improve the task completion rate and reduce user effort compared to non-adaptive shared control or full user control. This suggests the approach can enhance the usability of BMI-controlled robots by intelligently combining user input and autonomous navigation.
Critical Analysis
The paper provides a thorough evaluation of the proposed method through simulation experiments. However, it does not address potential limitations or areas for further research:
- The experiments are limited to a simulated environment, so the performance in real-world scenarios with noisy brain signals and dynamic environments is unclear.
- The goal estimation relies on the user's brain activity, which can be heavily influenced by various physiological and psychological factors. Robustness to these factors is not evaluated.
- The optimization-based navigation planner assumes known environment models, which may not always be available in practice. Integrating the shared control approach with open-world navigation could be an area for future work.
Overall, the paper presents a promising approach to enhance BMI-controlled robot navigation, but further research is needed to address the practical challenges of deploying such systems in real-world settings.
Conclusion
This paper introduces a goal estimation-based adaptive shared control method to combine brain-machine interface control and autonomous robot navigation capabilities. The key innovation is the dynamic adjustment of control authority between the user and robot based on the estimated user intent.
The simulation results suggest this approach can improve task performance and reduce user effort compared to other shared control strategies. This indicates the potential of such adaptive shared control techniques to enhance the usability and accessibility of BMI-controlled robotic systems for tasks like navigation.
Further research is needed to evaluate the method's robustness and integration with open-world navigation. But overall, this work represents an important step towards more intuitive and effective brain-controlled robot interfaces.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Goal Estimation-based Adaptive Shared Control for Brain-Machine Interfaces Remote Robot Navigation
Tomoka Muraoka, Tatsuya Aoki, Masayuki Hirata, Tadahiro Taniguchi, Takato Horii, Takayuki Nagai
In this study, we propose a shared control method for teleoperated mobile robots using brain-machine interfaces (BMI). The control commands generated through BMI for robot operation face issues of low input frequency, discreteness, and uncertainty due to noise. To address these challenges, our method estimates the user's intended goal from their commands and uses this goal to generate auxiliary commands through the autonomous system that are both at a higher input frequency and more continuous. Furthermore, by defining the confidence level of the estimation, we adaptively calculated the weights for combining user and autonomous commands, thus achieving shared control.
Read more7/26/2024
❗
0
The Brain-Inspired Cooperative Shared Control for Brain-Machine Interface
Shengjie Zheng, Ling Liu, Junjie Yang, Lang Qian, Gang Gao, Xin Chen, Wenqi Jin, Chunshan Deng, Xiaojian Li
In the practical application of brain-machine interface technology, the problem often faced is the low information content and high noise of the neural signals collected by the electrode and the difficulty of decoding by the decoder, which makes it difficult for the robotic to obtain stable instructions to complete the task. The idea based on the principle of cooperative shared control can be achieved by extracting general motor commands from brain activity, while the fine details of the movement can be hosted to the robot for completion, or the brain can have complete control. This study proposes a brain-machine interface shared control system based on spiking neural networks for robotic arm movement control and wheeled robots wheel speed control and steering, respectively. The former can reliably control the robotic arm to move to the destination position, while the latter controls the wheeled robots for object tracking and map generation. The results show that the shared control based on brain-inspired intelligence can perform some typical tasks in complex environments and positively improve the fluency and ease of use of brain-machine interaction, and also demonstrate the potential of this control method in clinical applications of brain-machine interfaces.
Read more6/27/2024

0
User-customizable Shared Control for Robot Teleoperation via Virtual Reality
Rui Luo, Mark Zolotas, Drake Moore, Taskin Padir
Shared control can ease and enhance a human operator's ability to teleoperate robots, particularly for intricate tasks demanding fine control over multiple degrees of freedom. However, the arbitration process dictating how much autonomous assistance to administer in shared control can confuse novice operators and impede their understanding of the robot's behavior. To overcome these adverse side-effects, we propose a novel formulation of shared control that enables operators to tailor the arbitration to their unique capabilities and preferences. Unlike prior approaches to customizable shared control where users could indirectly modify the latent parameters of the arbitration function by issuing a feedback command, we instead make these parameters observable and directly editable via a virtual reality (VR) interface. We present our user-customizable shared control method for a teleoperation task in SE(3), known as the buzz wire game. A user study is conducted with participants teleoperating a robotic arm in VR to complete the game. The experiment spanned two weeks per subject to investigate longitudinal trends. Our findings reveal that users allowed to interactively tune the arbitration parameters across trials generalize well to adaptations in the task, exhibiting improvements in precision and fluency over direct teleoperation and conventional shared control.
Read more8/15/2024
➖
0
Socially-Aware Shared Control Navigation for Assistive Mobile Robots in the Built Environment
Yifan Xu, Qianwei Wang, Vineet Kamat, Carol Menassa
As the number of Persons with Disabilities (PWD), particularly those with one or more physical impairments, increases, there is an increasing demand for assistive robotic technologies that can support independent mobility in the built environment and reduce the burden on caregivers. Current assistive mobility platforms (e.g., robotic wheelchairs) often fail to incorporate user preferences and control, leading to reduced trust and efficiency. Existing shared control algorithms do not allow the incorporation of the user control preferences inside the navigation framework or the path planning algorithm. In addition, existing dynamic local planner algorithms for robotic wheelchairs do not take into account the social spaces of people, potentially leading such platforms to infringe upon these areas and cause discomfort. To address these concerns, this work introduces a novel socially-aware shared autonomy-based navigation system for assistive mobile robotic platforms. Our navigation framework comprises a Global Planner and a Local Planner. To implement the Global Planner, the proposed approach introduces a novel User Preference Field (UPF) theory within its global planning framework, explicitly acknowledging user preferences to adeptly navigate away from congested areas. For the Local Planner, we propose a Socially-aware Shared Control-based Model Predictive Control with Dynamic Control Barrier Function (SS-MPC-DCBF) to adjust movements in real-time, integrating user preferences for safer, more autonomous navigation. Evaluation results show that our Global Planner aligns closely with user preferences compared to baselines, and our Local Planner demonstrates enhanced safety and efficiency in dynamic and static scenarios. This integrated approach fosters trust and autonomy, crucial for the acceptance of assistive mobility technologies in the built environment.
Read more5/28/2024