Goal-Reaching Trajectory Design Near Danger with Piecewise Affine Reach-avoid Computation
2402.15604
0
0

Abstract
Autonomous mobile robots must maintain safety, but should not sacrifice performance, leading to the classical reach-avoid problem: find a trajectory that is guaranteed to reach a goal and avoid obstacles. This paper addresses the near danger case, also known as a narrow gap, where the agent starts near the goal, but must navigate through tight obstacles that block its path. The proposed method builds off the common approach of using a simplified planning model to generate plans, which are then tracked using a high-fidelity tracking model and controller. Existing approaches use reachability analysis to overapproximate the error between these models and ensure safety, but doing so introduces numerical approximation error conservativeness that prevents goal-reaching. The present work instead proposes a Piecewise Affine Reach-avoid Computation (PARC) method to tightly approximate the reachable set of the planning model. PARC significantly reduces conservativeness through a careful choice of the planning model and set representation, along with an effective approach to handling time-varying tracking errors. The utility of this method is demonstrated through extensive numerical experiments in which PARC outperforms state-of-the-art reach avoid methods in near-danger goal reaching. Furthermore, in a simulated demonstration, PARC enables the generation of provably-safe extreme vehicle dynamics drift parking maneuvers. A preliminary hardware demo on a TurtleBot3 also validates the method.
Create account to get full access
Overview
- This paper presents a method for designing goal-reaching trajectories for robots or vehicles that need to navigate near dangerous areas.
- The approach uses a "piecewise affine reach-avoid computation" to plan safe and efficient trajectories.
- The goal is to enable robots or vehicles to reach their target destination while avoiding collisions with obstacles or other hazards.
Plain English Explanation
The paper describes a way to help robots or self-driving vehicles navigate safely through complex environments. Imagine you're trying to get a robot or car to a specific location, but there are obstacles, hazards, or other dangers along the route. This method allows the robot or vehicle to plan a path that reaches the goal while carefully avoiding those dangerous areas.
It does this using a mathematical technique called "piecewise affine reach-avoid computation." This fancy phrase means the system breaks down the environment into simpler pieces, analyzes each piece to understand what's safe and what's not, and then stitches those analyses together to find an overall path that steers clear of trouble. [internal link to https://aimodels.fyi/papers/arxiv/safe-stabilizing-control-polygonal-robots-dynamic-elliptical]
The key benefit is that it allows robots and vehicles to operate near hazardous zones without risking collisions or other accidents. This could be really important for applications like search and rescue, hazardous material transport, or autonomous driving in urban areas with lots of obstacles. [internal link to https://aimodels.fyi/papers/arxiv/safe-reach-set-computation-via-neural-barrier, https://aimodels.fyi/papers/arxiv/chance-constrained-control-safe-spacecraft-autonomy-convex, https://aimodels.fyi/papers/arxiv/interaction-aware-vehicle-motion-planning-collision-avoidance]
Technical Explanation
The paper proposes a method for computing "reach-avoid" sets, which represent the set of safe states that a system can reach while avoiding unsafe regions. This is done using a piecewise affine approximation of the dynamics, which allows the reach-avoid set to be computed efficiently.
Specifically, the system first constructs a piecewise affine model of the robot/vehicle dynamics and the unsafe regions in the environment. It then uses this model to compute the reach-avoid set, which represents the set of states that the robot/vehicle can reach while safely avoiding the unsafe regions. [internal link to https://aimodels.fyi/papers/arxiv/safe-stabilizing-control-polygonal-robots-dynamic-elliptical, https://aimodels.fyi/papers/arxiv/safe-reach-set-computation-via-neural-barrier]
The key technical contributions include:
- A method for constructing the piecewise affine model
- An algorithm for efficiently computing the reach-avoid set
- Proofs of the correctness and convergence of the proposed approach
Experiments on several benchmark examples demonstrate the effectiveness of the method in computing safe, goal-reaching trajectories in the presence of obstacles and hazards.
Critical Analysis
The paper makes a compelling case for the importance of safe navigation in complex environments, and the proposed piecewise affine reach-avoid method seems like a promising approach. However, a few potential limitations or areas for further research are worth considering:
-
The piecewise affine model may not be able to capture all the nuances of real-world robot/vehicle dynamics, particularly for highly complex or nonlinear systems. Extending the approach to handle more general system models could be an area for future work. [internal link to https://aimodels.fyi/papers/arxiv/safe-reach-set-computation-via-neural-barrier]
-
The method assumes full knowledge of the environment, including the locations of obstacles and hazards. In real-world scenarios, this information may not be perfectly known, which could introduce additional challenges. Incorporating uncertainty and partial observability could be an important extension. [internal link to https://aimodels.fyi/papers/arxiv/chance-constrained-control-safe-spacecraft-autonomy-convex, https://aimodels.fyi/papers/arxiv/interaction-aware-vehicle-motion-planning-collision-avoidance]
-
The computational complexity of the reach-avoid set computation may limit the scalability of the approach, particularly for high-dimensional systems. Exploring ways to improve efficiency or leverage approximations could help extend the method to more complex applications.
Overall, the paper presents a valuable contribution to the field of safe navigation and trajectory planning, but there are still opportunities for further research and development to address some of the potential limitations.
Conclusion
This paper introduces a novel method for designing goal-reaching trajectories for robots and vehicles that need to operate near dangerous areas. By using a piecewise affine reach-avoid computation, the approach can efficiently plan safe and efficient paths that avoid collisions with obstacles or other hazards.
The key benefits of this technique are its ability to enable robots and autonomous vehicles to navigate complex environments while maintaining a high degree of safety. This could have significant implications for a wide range of applications, from search and rescue operations to self-driving cars in urban settings.
While the paper presents a compelling approach, there are still opportunities for further research to address some of the potential limitations, such as handling more complex system dynamics, incorporating uncertainty, and improving computational efficiency. Overall, this work represents an important step forward in the field of safe navigation and trajectory planning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Path Planning and Motion Control for Accurate Positioning of Car-like Robots
Jin Dai, Zejiang Wang, Yebin Wang, Rien Quirynen, Stefano Di Cairano
0
0
This paper investigates the planning and control for accurate positioning of car-like robots. We propose a solution that integrates two modules: a motion planner, facilitated by the rapidly-exploring random tree algorithm and continuous-curvature (CC) steering technique, generates a CC trajectory as a reference; and a nonlinear model predictive controller (NMPC) regulates the robot to accurately track the reference trajectory. Based on the $mu$-tangency conditions in prior art, we derive explicit existence conditions and develop associated computation methods for a special class of CC paths which not only admit the same driving patterns as Reeds-Shepp paths but also consist of cusp-free clothoid turns. Afterwards, we create an autonomous vehicle parking scenario where the NMPC endeavors to follow the reference trajectory. Feasibility and computational efficiency of the CC steering are validated by numerical simulation. CarSim-Simulink joint simulations statistically verify that with exactly same NMPC, the closed-loop system with CC trajectories as references substantially outperforms the case where Reeds-Shepp trajectories are used as references.
6/11/2024

Safe Reach Set Computation via Neural Barrier Certificates
Alessandro Abate, Sergiy Bogomolov, Alec Edwards, Kostiantyn Potomkin, Sadegh Soudjani, Paolo Zuliani
0
0
We present a novel technique for online safety verification of autonomous systems, which performs reachability analysis efficiently for both bounded and unbounded horizons by employing neural barrier certificates. Our approach uses barrier certificates given by parameterized neural networks that depend on a given initial set, unsafe sets, and time horizon. Such networks are trained efficiently offline using system simulations sampled from regions of the state space. We then employ a meta-neural network to generalize the barrier certificates to state space regions that are outside the training set. These certificates are generated and validated online as sound over-approximations of the reachable states, thus either ensuring system safety or activating appropriate alternative actions in unsafe scenarios. We demonstrate our technique on case studies from linear models to nonlinear control-dependent models for online autonomous driving scenarios.
4/30/2024
🏋️
Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments
Kehan Long, Khoa Tran, Melvin Leok, Nikolay Atanasov
0
0
This paper addresses the challenge of safe navigation for rigid-body mobile robots in dynamic environments. We introduce an analytic approach to compute the distance between a polygon and an ellipse, and employ it to construct a control barrier function (CBF) for safe control synthesis. Existing CBF design methods for mobile robot obstacle avoidance usually assume point or circular robots, preventing their applicability to more realistic robot body geometries. Our work enables CBF designs that capture complex robot and obstacle shapes. We demonstrate the effectiveness of our approach in simulations highlighting real-time obstacle avoidance in constrained and dynamic environments for both mobile robots and multi-joint robot arms.
5/1/2024
Chance-Constrained Control for Safe Spacecraft Autonomy: Convex Programming Approach
Kenshiro Oguri
0
0
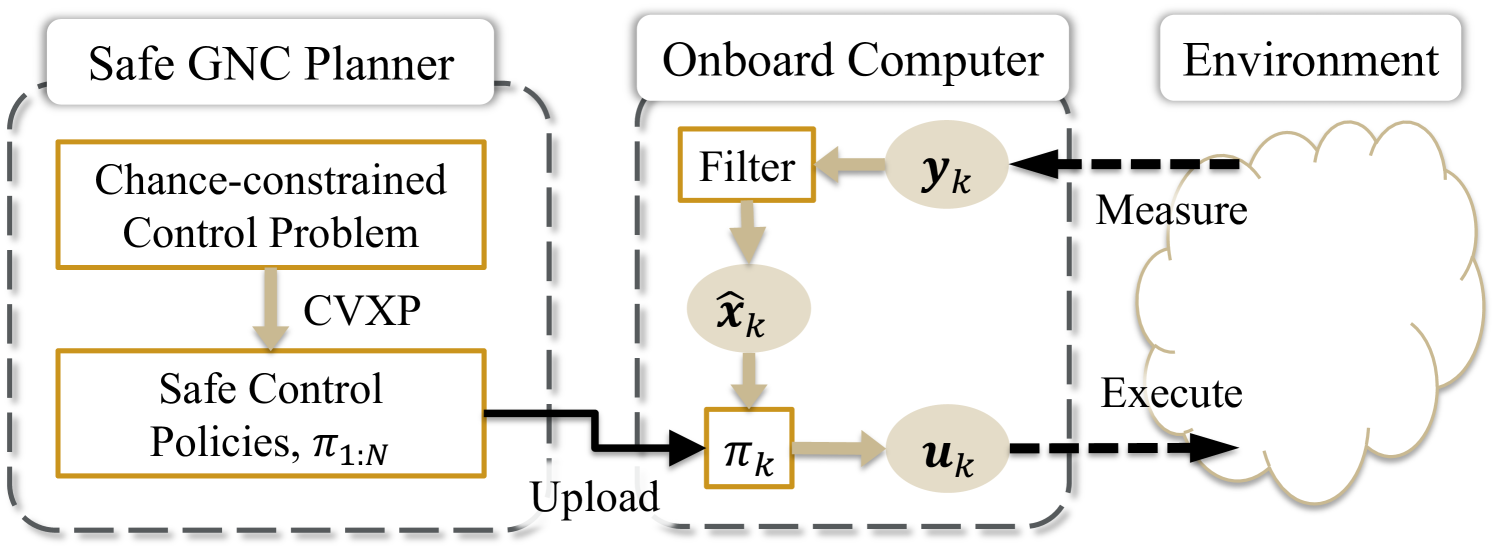
This paper presents a robust path-planning framework for safe spacecraft autonomy under uncertainty and develops a computationally tractable formulation based on convex programming. We utilize chance-constrained control to formulate the problem. It provides a mathematical framework to solve for a sequence of control policies that minimizes a probabilistic cost under probabilistic constraints with a user-defined confidence level (e.g., safety with 99.9% confidence). The framework enables the planner to directly control state distributions under operational uncertainties while ensuring the vehicle safety. This paper rigorously formulates the safe autonomy problem, gathers and extends techniques in literature to accommodate key cost/constraint functions that often arise in spacecraft path planning, and develops a tractable solution method. The presented framework is demonstrated via two representative numerical examples: safe autonomous rendezvous and orbit maintenance in cislunar space, both under uncertainties due to navigation error from Kalman filter, execution error via Gates model, and imperfect force models.
4/19/2024