Chance-Constrained Control for Safe Spacecraft Autonomy: Convex Programming Approach
2403.04062
0
0
Abstract
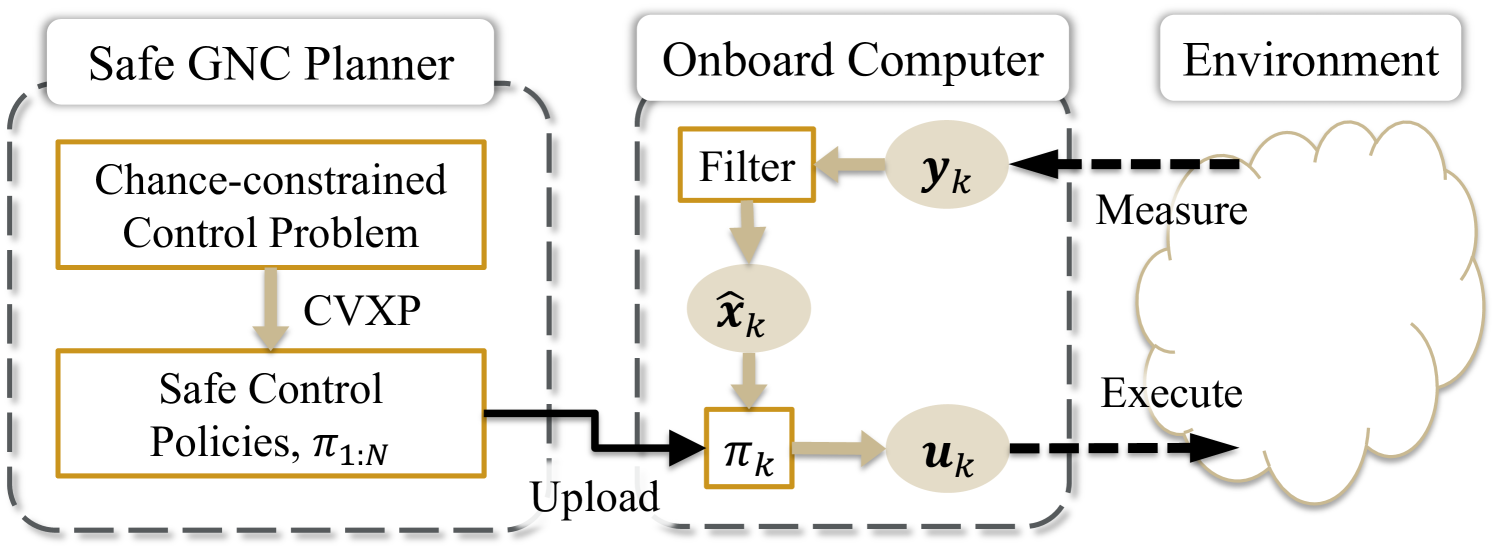
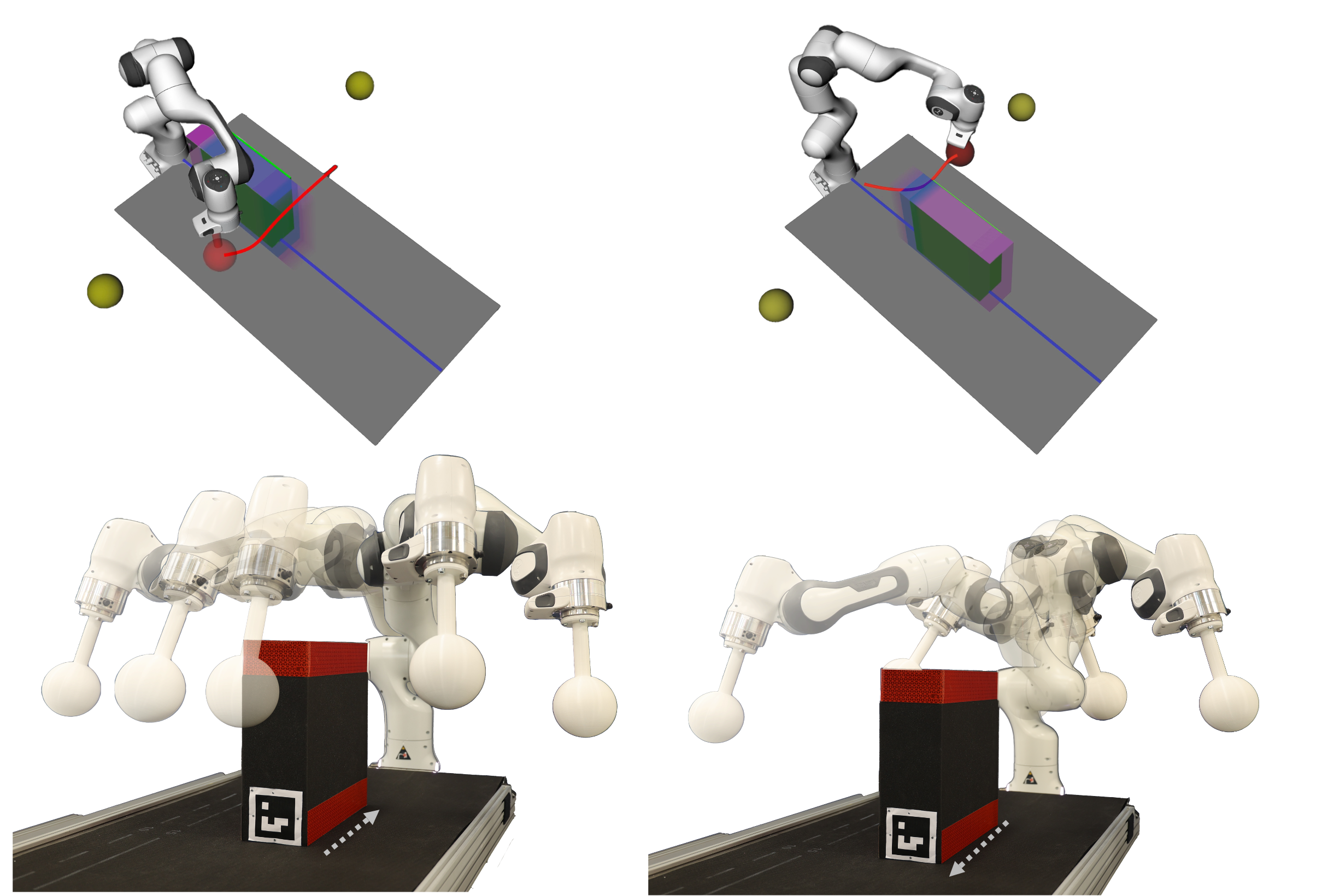
This paper presents a robust path-planning framework for safe spacecraft autonomy under uncertainty and develops a computationally tractable formulation based on convex programming. We utilize chance-constrained control to formulate the problem. It provides a mathematical framework to solve for a sequence of control policies that minimizes a probabilistic cost under probabilistic constraints with a user-defined confidence level (e.g., safety with 99.9% confidence). The framework enables the planner to directly control state distributions under operational uncertainties while ensuring the vehicle safety. This paper rigorously formulates the safe autonomy problem, gathers and extends techniques in literature to accommodate key cost/constraint functions that often arise in spacecraft path planning, and develops a tractable solution method. The presented framework is demonstrated via two representative numerical examples: safe autonomous rendezvous and orbit maintenance in cislunar space, both under uncertainties due to navigation error from Kalman filter, execution error via Gates model, and imperfect force models.
Create account to get full access
Overview
- This paper presents a chance-constrained control approach for safe spacecraft autonomy using convex programming.
- The method aims to ensure safe spacecraft operation by accounting for uncertainty in the orbital dynamics and control inputs.
- The authors develop a chance-constrained optimization framework that can be solved efficiently using convex programming techniques.
- The proposed approach is demonstrated through simulations and case studies, showing its effectiveness in managing collision avoidance and other spacecraft safety constraints.
Plain English Explanation
Spacecraft navigation and control often face uncertainty, such as unpredictable forces acting on the spacecraft or errors in the control system. This can make it challenging to ensure the spacecraft's safety and prevent collisions with other objects. The authors of this paper have developed a new approach to address this problem.
Their method uses a mathematical technique called "chance-constrained optimization" to plan the spacecraft's movements. This allows them to account for the uncertainty in the spacecraft's behavior and ensure that the risk of violating safety constraints, like collision avoidance, is kept below a desired level. By formulating the problem in a way that can be solved efficiently using convex programming, the authors can find optimal control strategies that balance safety and performance.
The authors demonstrate the effectiveness of their approach through computer simulations and case studies. They show that their chance-constrained control method can successfully navigate the spacecraft while managing the risks associated with uncertainty, like potential collisions. This work could help improve the autonomy and safety of spacecraft operations, which is crucial for missions where human intervention is not practical or possible.
Technical Explanation
The paper presents a chance-constrained control framework for safe spacecraft autonomy, building on concepts from orbital mechanics, chance-constrained optimization, and convex programming.
The authors first develop a stochastic model for the spacecraft's orbital dynamics, which includes uncertainties in the control inputs and external disturbances. They then formulate a chance-constrained optimization problem to determine the optimal control inputs that minimize a cost function while ensuring that the probability of violating safety constraints, such as collision avoidance, is kept below a specified level.
To solve this optimization problem efficiently, the authors leverage convex programming techniques, which allow them to find global optimal solutions. They also incorporate the concept of via-points to improve the feasibility and performance of the chance-constrained optimization.
The proposed approach is evaluated through numerical simulations and case studies, demonstrating its effectiveness in managing collision avoidance and other spacecraft safety constraints. The authors also discuss the advantages of their method compared to traditional deterministic control approaches, which may not be able to adequately account for the inherent uncertainties in spacecraft operations.
Critical Analysis
The authors have presented a comprehensive and well-designed chance-constrained control framework for safe spacecraft autonomy. The use of convex programming techniques to efficiently solve the optimization problem is a notable strength, as it allows for the consideration of uncertainty while maintaining computational tractability.
One potential limitation of the approach is the reliance on accurate stochastic models of the spacecraft's orbital dynamics and control inputs. In practice, there may be additional sources of uncertainty or modeling errors that are not fully captured by the proposed framework. The authors acknowledge this and suggest the need for further research to address these challenges, such as the incorporation of robust optimization techniques or data-driven methods to improve the modeling accuracy.
Another area for further investigation could be the extension of the chance-constrained approach to handle more complex mission scenarios, such as multi-spacecraft operations or dynamic environments with moving obstacles. The authors briefly mention these possibilities, but a more detailed exploration of the scalability and adaptability of the proposed framework would be valuable.
Overall, the authors have made a significant contribution to the field of spacecraft autonomy by developing a novel chance-constrained control approach that effectively addresses the challenge of ensuring safe operations in the presence of uncertainty. The paper's theoretical rigor and practical demonstrations suggest that this work has the potential to have a meaningful impact on the design and deployment of autonomous spacecraft systems.
Conclusion
This paper presents a chance-constrained control framework for safe spacecraft autonomy, leveraging convex programming techniques to efficiently solve the optimization problem. The approach accounts for uncertainties in the spacecraft's orbital dynamics and control inputs, ensuring that the probability of violating safety constraints, such as collision avoidance, is kept below a desired level.
The authors demonstrate the effectiveness of their method through numerical simulations and case studies, showcasing its ability to manage spacecraft safety while maintaining optimal performance. This work has the potential to significantly improve the autonomy and reliability of spacecraft operations, particularly in scenarios where human intervention is not feasible or practical.
The paper also identifies areas for further research, such as the incorporation of more robust modeling techniques and the extension of the framework to handle more complex mission scenarios. Addressing these challenges could lead to even more advanced and versatile autonomous spacecraft control systems.
Overall, this research represents an important step forward in the field of spacecraft autonomy, providing a novel and promising approach to ensuring safe and reliable operations in the presence of uncertainty.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

A Novel Optimization-Based Collision Avoidance For Autonomous On-Orbit Assembly
Siavash Tavana, Sepideh Faghihi, Anton de Ruiter, Krishna Dev Kumar
0
0
The collision avoidance constraints are prominent as non-convex, non-differentiable, and challenging when defined in optimization-based motion planning problems. To overcome these issues, this paper presents a novel non-conservative collision avoidance technique using the notion of convex optimization to establish the distance between robotic spacecraft and space structures for autonomous on-orbit assembly operations. The proposed technique defines each ellipsoidal- and polyhedral-shaped object as the union of convex compact sets, each represented non-conservatively by a real-valued convex function. Then, the functions are introduced as a set of constraints to a convex optimization problem to produce a new set of differentiable constraints resulting from the optimality conditions. These new constraints are later fed into an optimal control problem to enforce collision avoidance where the motion planning for the autonomous on-orbit assembly takes place. Numerical experiments for two assembly scenarios in tight environments are presented to demonstrate the capability and effectiveness of the proposed technique. The results show that this framework leads to optimal non-conservative trajectories for robotic spacecraft in tight environments. Although developed for autonomous on-orbit assembly, this technique could be used for any generic motion planning problem where collision avoidance is crucial.
4/16/2024
CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
Lara Brudermuller, Guillaume Berger, Julius Jankowski, Raunak Bhattacharyya, Raphael Jungers, Nick Hawes
0
0
Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
4/10/2024

A Convex Formulation of the Soft-Capture Problem
Ibrahima Sory Sow, Geordan Gutow, Howie Choset, Zachary Manchester
0
0
We present a fast trajectory optimization algorithm for the soft capture of uncooperative tumbling space objects. Our algorithm generates safe, dynamically feasible, and minimum-fuel trajectories for a six-degree-of-freedom servicing spacecraft to achieve soft capture (near-zero relative velocity at contact) between predefined locations on the servicer spacecraft and target body. We solve a convex problem by enforcing a convex relaxation of the field-of-view constraint, followed by a sequential convex program correcting the trajectory for collision avoidance. The optimization problems can be solved with a standard second-order cone programming solver, making the algorithm both fast and practical for implementation in flight software. We demonstrate the performance and robustness of our algorithm in simulation over a range of object tumble rates up to 10{deg}/s.
5/3/2024
🧠
Optimal path planning and weighted control of a four-arm robot in on-orbit servicing
Celia Redondo-Verd'u, Jos'e L. Ram'on, 'Alvaro Belmonte-Baeza, Jorge Pomares, Leonard Felicetti
0
0
This paper presents a trajectory optimization and control approach for the guidance of an orbital four-arm robot in extravehicular activities. The robot operates near the target spacecraft, enabling its arm's end-effectors to reach the spacecraft's surface. Connections to the target spacecraft can be established by the arms through specific footholds (docking devices). The trajectory optimization allows the robot path planning by computing the docking positions on the target spacecraft surface, along with their timing, the arm trajectories, the six degrees of freedom body motion, and the necessary contact forces during docking. In addition, the paper introduces a controller designed to track the planned trajectories derived from the solution of the nonlinear programming problem. A weighted controller formulated as a convex optimization problem is proposed. The controller is defined as the optimization of an objective function that allows the system to perform a set of tasks simultaneously. Simulation results show the application of the trajectory optimization and control approaches to an on-orbit servicing scenario.
6/10/2024