Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments

0
🏋️
Sign in to get full access
Overview
- This paper addresses the challenge of safe navigation for mobile robots in dynamic environments.
- The authors introduce an analytic approach to compute the distance between a polygon and an ellipse, and use it to construct a control barrier function (CBF) for safe control synthesis.
- Existing CBF design methods for mobile robot obstacle avoidance often assume point or circular robots, limiting their applicability to more realistic robot body geometries. This work enables CBF designs that capture complex robot and obstacle shapes.
- The effectiveness of the approach is demonstrated through simulations highlighting real-time obstacle avoidance in constrained and dynamic environments for both mobile robots and multi-joint robot arms.
Plain English Explanation
The paper focuses on making it safer for mobile robots to navigate through dynamic and cluttered environments. The key challenge is that robots need to be able to quickly and accurately detect and avoid obstacles, which can be difficult when the robot's body is not a simple shape like a circle or point.
To address this, the researchers developed a new way to calculate the distance between a polygon (which can represent the robot's shape) and an ellipse (which can represent an obstacle). This allowed them to create a control barrier function (CBF) that the robot can use to plan safe movements and avoid collisions, even with complex-shaped obstacles.
The advantage of this approach is that it can work for robots with more realistic, non-circular body shapes, unlike previous methods. The researchers demonstrated the effectiveness of their technique through computer simulations, showing that the robots were able to successfully navigate through constrained and dynamic environments without colliding with obstacles.
Technical Explanation
The paper presents an analytic approach to compute the distance between a polygon and an ellipse, which is then used to construct a control barrier function (CBF) for safe control synthesis of rigid-body mobile robots in dynamic environments.
Existing CBF design methods for mobile robot obstacle avoidance typically assume the robot is a point or a circle, which prevents their applicability to more realistic robot body geometries. The authors' approach enables the design of CBFs that can capture complex shapes of both the robot and the obstacles.
The distance computation between the polygon and ellipse is formulated as a constrained optimization problem, which is solved analytically. This distance metric is then used to construct the CBF, which is integrated into a model predictive control framework to generate safe robot trajectories in real-time.
The effectiveness of the approach is demonstrated through simulations of both mobile robots and multi-joint robot arms navigating constrained and dynamic environments, showing successful obstacle avoidance.
Critical Analysis
The paper presents a promising approach to addressing the challenge of safe navigation for mobile robots with complex geometries. The analytic distance computation between polygons and ellipses is a key technical contribution that enables the design of more versatile CBFs.
However, the paper does not provide an extensive evaluation of the approach's robustness to sensing errors, model uncertainties, or other real-world factors that may affect its performance. Additionally, the simulations, while showcasing the method's capabilities, do not yet validate its effectiveness in physical experiments.
Further research could explore the integration of this approach with semantic information to better understand the environment and enable more adaptive and robust safe control. Comparisons to other optimization-based collision avoidance techniques could also provide useful insights.
Conclusion
This paper presents an analytic approach to compute the distance between a polygon and an ellipse, which enables the construction of control barrier functions (CBFs) that can capture the complex geometries of mobile robots and obstacles. The proposed method demonstrates the ability to generate safe trajectories for both mobile robots and multi-joint robot arms in constrained and dynamic environments through simulations.
The key contribution of this work is the expansion of CBF-based safe navigation techniques to handle more realistic robot body shapes, going beyond the typical point or circular assumptions. This advancement has the potential to improve the safety and applicability of autonomous mobile robots in real-world scenarios.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏋️
0
Safe Stabilizing Control for Polygonal Robots in Dynamic Elliptical Environments
Kehan Long, Khoa Tran, Melvin Leok, Nikolay Atanasov
This paper addresses the challenge of safe navigation for rigid-body mobile robots in dynamic environments. We introduce an analytic approach to compute the distance between a polygon and an ellipse, and employ it to construct a control barrier function (CBF) for safe control synthesis. Existing CBF design methods for mobile robot obstacle avoidance usually assume point or circular robots, preventing their applicability to more realistic robot body geometries. Our work enables CBF designs that capture complex robot and obstacle shapes. We demonstrate the effectiveness of our approach in simulations highlighting real-time obstacle avoidance in constrained and dynamic environments for both mobile robots and multi-joint robot arms.
Read more5/1/2024

0
Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
Kehan Long, Yinzhuang Yi, Zhirui Dai, Sylvia Herbert, Jorge Cort'es, Nikolay Atanasov
We introduce a novel method for safe mobile robot navigation in dynamic, unknown environments, utilizing onboard sensing to impose safety constraints without the need for accurate map reconstruction. Traditional methods typically rely on detailed map information to synthesize safe stabilizing controls for mobile robots, which can be computationally demanding and less effective, particularly in dynamic operational conditions. By leveraging recent advances in distributionally robust optimization, we develop a distributionally robust control barrier function (DR-CBF) constraint that directly processes range sensor data to impose safety constraints. Coupling this with a control Lyapunov function (CLF) for path tracking, we demonstrate that our CLF-DR-CBF control synthesis method achieves safe, efficient, and robust navigation in uncertain dynamic environments. We demonstrate the effectiveness of our approach in simulated and real autonomous robot navigation experiments, marking a substantial advancement in real-time safety guarantees for mobile robots.
Read more5/29/2024

0
Neural Control Barrier Functions for Safe Navigation
Marvin Harms, Mihir Kulkarni, Nikhil Khedekar, Martin Jacquet, Kostas Alexis
Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and safety of the robot is crucial. This work relates to the synthesis of Control Barrier Functions (CBFs) through data for safe navigation in unknown environments. A novel methodology to jointly learn CBFs and corresponding safe controllers, in simulation, inspired by the State Dependent Riccati Equation (SDRE) is proposed. The CBF is used to obtain admissible commands from any nominal, possibly unsafe controller. An approach to apply the CBF inside a safety filter without the need for a consistent map or position estimate is developed. Subsequently, the resulting reactive safety filter is deployed on a multirotor platform integrating a LiDAR sensor both in simulation and real-world experiments.
Read more7/30/2024
0
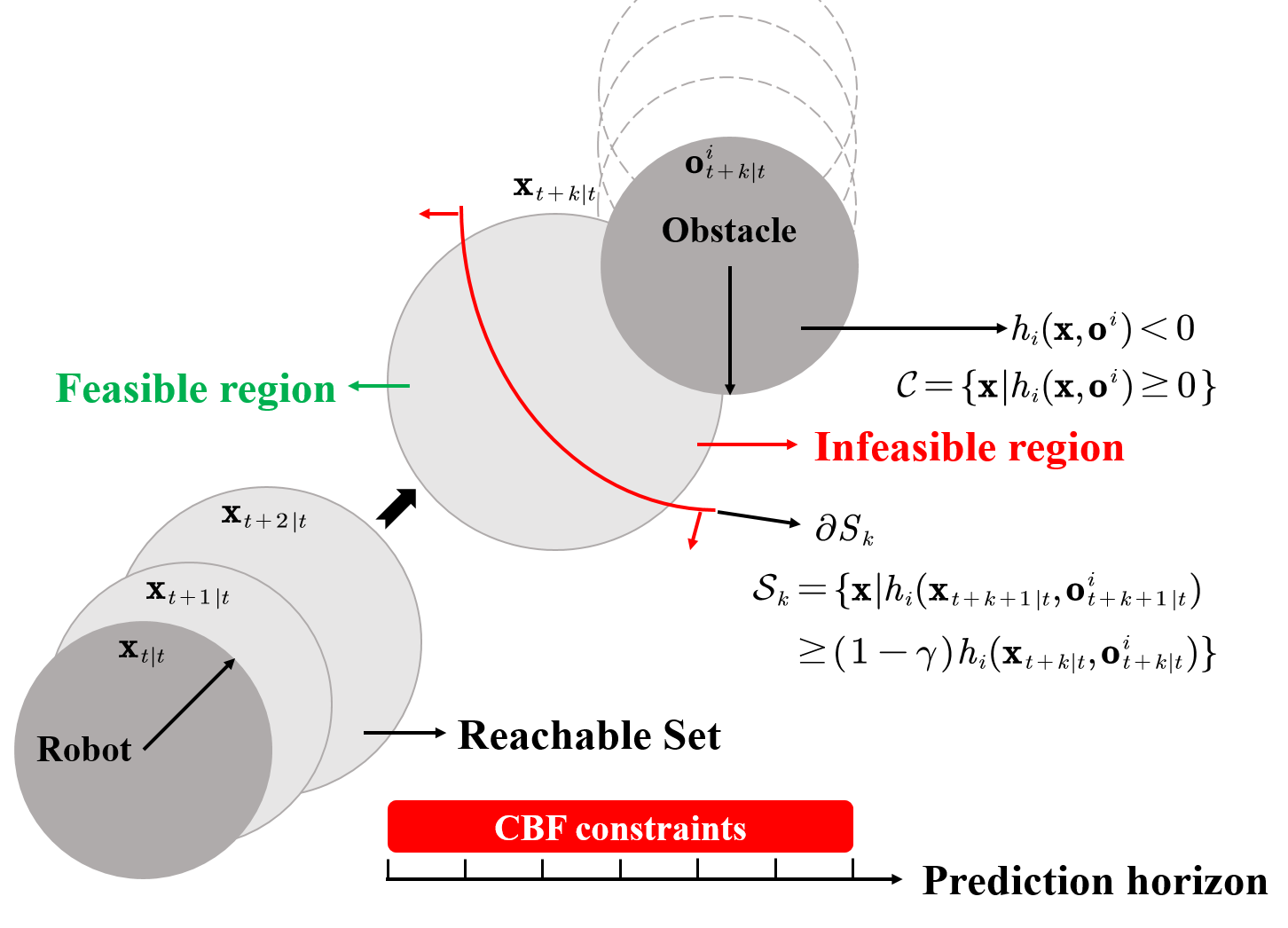
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024