Golden Ratio Yoshimura for Meta-Stable and Massively Reconfigurable Deployment
2405.18558
2
0
Abstract
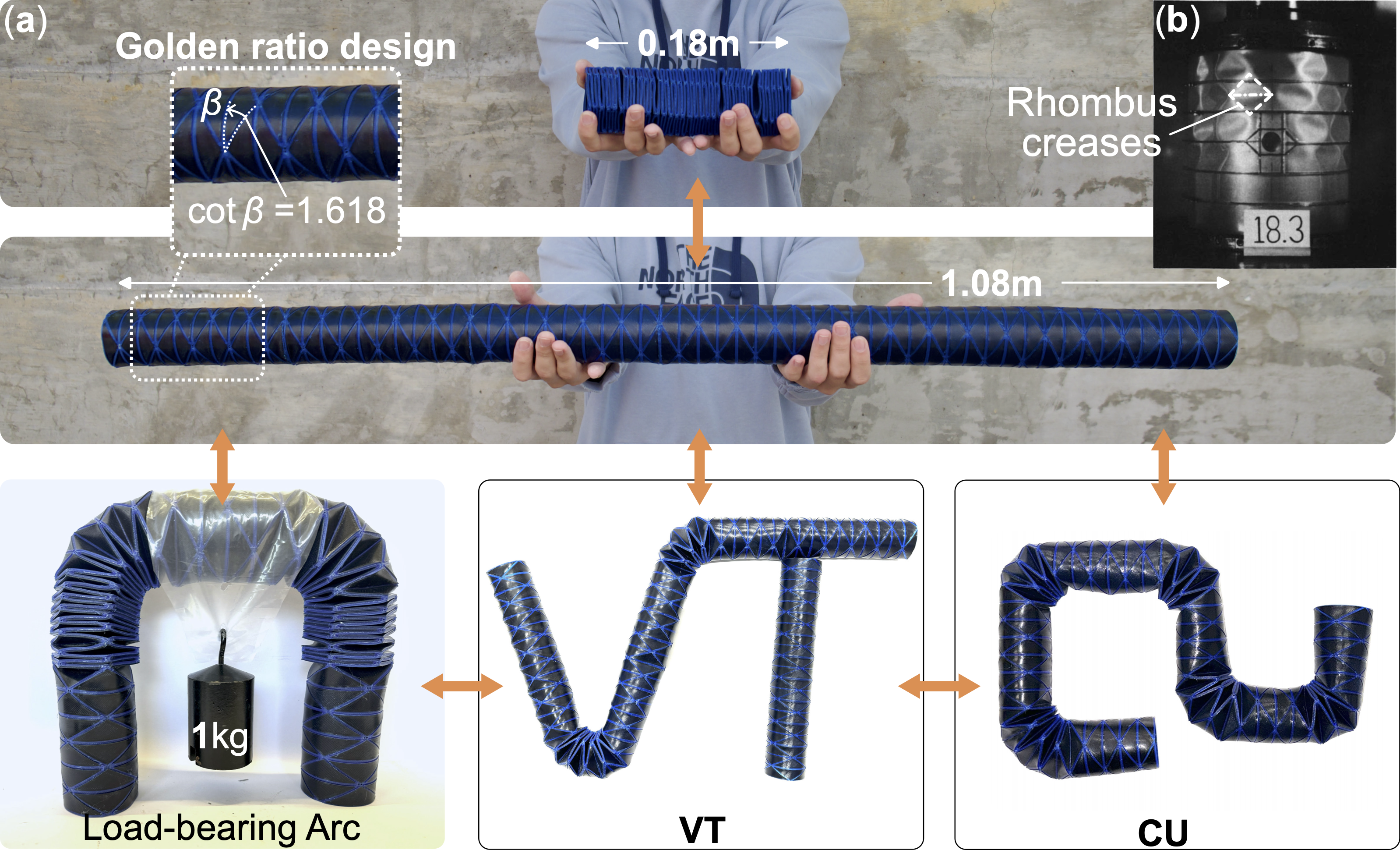
Yoshimura origami is a classical folding pattern that has inspired many deployable structure designs. Its applications span from space exploration, kinetic architectures, and soft robots to even everyday household items. However, despite its wide usage, Yoshimura has been fixated on a set of design constraints to ensure its flat-foldability. Through extensive kinematic analysis and prototype tests, this study presents a new Yoshimura that intentionally defies these constraints. Remarkably, one can impart a unique meta-stability by using the Golden Ratio angle to define the triangular facets of a generalized Yoshimura. As a result, when its facets are strategically popped out, a ``Golden Ratio Yoshimura'' boom with $m$ modules can be theoretically reconfigured into $8^m$ geometrically unique and load-bearing shapes. This result not only challenges the existing design norms but also opens up a new avenue to create deployable and versatile structural systems.
Create account to get full access
Overview
- This research paper explores the design and kinematics of the "Golden Ratio Yoshimura", a novel deployable structure inspired by the Yoshimura origami pattern and the golden ratio.
- The key innovations include a meta-stable design that can be reconfigured into various shapes, and a fabrication approach that enables massively reconfigurable deployment.
- The authors demonstrate the potential of this system for applications in space exploration, robotics, and architecture.
Plain English Explanation
The "Golden Ratio Yoshimura" is a new type of deployable structure that can transform into different shapes. It's inspired by the Yoshimura origami pattern, which uses a zigzag design, and the golden ratio, a mathematical proportion found in nature.
The key advantages of this design are:
-
Meta-Stability: The structure can stay in different configurations without requiring external energy to hold it in place. This makes it easy to reconfigure as needed.
-
Massive Reconfigurability: The fabrication approach allows for the creation of large-scale, complex structures that can be easily reconfigured. This could be useful for things like deployable space structures, modular robots, or adaptive architecture.
The key idea is to use the golden ratio, a mathematical proportion found in nature, to design a deployable structure that can take on many different shapes. This could have a lot of applications, like in space exploration, robotics, and architecture.
Technical Explanation
The paper presents the design and kinematic analysis of the "Golden Ratio Yoshimura", a novel deployable structure inspired by the Yoshimura origami pattern and the golden ratio. The key innovations include:
-
Meta-Stable Design: The structure is designed to be meta-stable, meaning it can maintain different configurations without requiring external energy to hold it in place. This allows for easy reconfiguration between different shapes.
-
Massively Reconfigurable Fabrication: The authors develop a fabrication approach that enables the creation of large-scale, complex structures that can be easily reconfigured. This involves the use of modular components and a "golden ratio" scaling strategy.
The paper provides a detailed kinematic analysis of the Golden Ratio Yoshimura, including its degrees of freedom, stability conditions, and reconfiguration capabilities. The authors demonstrate the potential of this system through a series of physical prototypes and simulations, showcasing its versatility for a range of applications.
Critical Analysis
The paper presents a compelling design for a highly reconfigurable deployable structure, with a strong theoretical foundation and promising experimental results. However, some potential limitations and areas for further research are worth noting:
-
Scalability Challenges: While the fabrication approach aims to enable massive reconfigurability, the complexity of the system may pose challenges in scaling to truly large-scale deployments. The authors acknowledge the need for further investigation into manufacturing and assembly processes.
-
Structural Stability: The meta-stable design is a key feature, but the paper does not extensively explore the structural integrity and load-bearing capabilities of the system across different configurations. Investigating the system's behavior under various loading conditions would be valuable.
-
Energy Requirements: The paper focuses on the reconfiguration capabilities, but does not delve into the energy requirements or actuation mechanisms needed to transition between configurations. Understanding the energy costs and feasibility of automated reconfiguration is an important next step.
-
Real-World Applications: The paper presents several potential application domains, such as space exploration and architecture. However, more detailed case studies or prototypes demonstrating the system's performance in these specific contexts would strengthen the argument for its practical relevance.
Overall, the "Golden Ratio Yoshimura" represents an innovative and promising approach to deployable structures, with significant potential for further development and exploration.
Conclusion
The "Golden Ratio Yoshimura" introduced in this paper offers a novel design for a highly reconfigurable deployable structure, leveraging the Yoshimura origami pattern and the golden ratio to create a meta-stable system. The authors' work demonstrates the potential of this approach for a range of applications, including space exploration, robotics, and architecture.
While the paper presents a strong theoretical foundation and promising experimental results, further research is needed to address scalability challenges, investigate structural stability, and explore the energy requirements and real-world feasibility of this system. Nonetheless, the "Golden Ratio Yoshimura" represents an exciting and innovative contribution to the field of deployable and reconfigurable structures, with significant implications for the future of adaptable and versatile systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
✅
Design and Fabrication of String-driven Origami Robots
Peiwen Yang, Shuguang Li
0
0
Origami designs and structures have been widely used in many fields, such as morphing structures, robotics, and metamaterials. However, the design and fabrication of origami structures rely on human experiences and skills, which are both time and labor-consuming. In this paper, we present a rapid design and fabrication method for string-driven origami structures and robots. We developed an origami design software to generate desired crease patterns based on analytical models and Evolution Strategies (ES). Additionally, the software can automatically produce 3D models of origami designs. We then used a dual-material 3D printer to fabricate those wrapping-based origami structures with the required mechanical properties. We utilized Twisted String Actuators (TSAs) to fold the target 3D structures from flat plates. To demonstrate the capability of these techniques, we built and tested an origami crawling robot and an origami robotic arm using 3D-printed origami structures driven by TSAs.
4/16/2024

Reconfiguration Algorithms for Cubic Modular Robots with Realistic Movement Constraints
NASA Space Robots Team, Josh Brunner, Kenneth C. Cheung, Erik D. Demaine, Jenny Diomidova, Christine Gregg, Della H. Hendrickson, Irina Kostitsyna
0
0
We introduce and analyze a model for self-reconfigurable robots made up of unit-cube modules. Compared to past models, our model aims to newly capture two important practical aspects of real-world robots. First, modules often do not occupy an exact unit cube, but rather have features like bumps extending outside the allotted space so that modules can interlock. Thus, for example, our model forbids modules from squeezing in between two other modules that are one unit distance apart. Second, our model captures the practical scenario of many passive modules assembled by a single robot, instead of requiring all modules to be able to move on their own. We prove two universality results. First, with a supply of auxiliary modules, we show that any connected polycube structure can be constructed by a carefully aligned plane sweep. Second, without additional modules, we show how to construct any structure for which a natural notion of external feature size is at least a constant; this property largely consolidates forbidden-pattern properties used in previous works on reconfigurable modular robots.
5/27/2024
🛸
Task-Driven Computational Framework for Simultaneously Optimizing Design and Mounted Pose of Modular Reconfigurable Manipulators
Maolin Lei, Edoardo Romiti, Arturo Laurenz, Nikos G. Tsagarakis
0
0
Modular reconfigurable manipulators enable quick adaptation and versatility to address different application environments and tailor to the specific requirements of the tasks. Task performance significantly depends on the manipulator's mounted pose and morphology design, therefore posing the need of methodologies for selecting suitable modular robot configurations and mounted pose that can address the specific task requirements and required performance. Morphological changes in modular robots can be derived through a discrete optimization process involving the selective addition or removal of modules. In contrast, the adjustment of the mounted pose operates within a continuous space, allowing for smooth and precise alterations in both orientation and position. This work introduces a computational framework that simultaneously optimizes modular manipulators' mounted pose and morphology. The core of the work is that we design a mapping function that textit{implicitly} captures the morphological state of manipulators in the continuous space. This transformation function unifies the optimization of mounted pose and morphology within a continuous space. Furthermore, our optimization framework incorporates a array of performance metrics, such as minimum joint effort and maximum manipulability, and considerations for trajectory execution error and physical and safety constraints. To highlight our method's benefits, we compare it with previous methods that framed such problem as a combinatorial optimization problem and demonstrate its practicality in selecting the modular robot configuration for executing a drilling task with the CONCERT modular robotic platform.
5/6/2024
✨
A global approach for the redefinition of higher-order flexibility and rigidity
Georg Nawratil
0
0
The famous example of the double-Watt mechanism given by Connelly and Servatius raises some problems concerning the classical definitions of higher-order flexibility and rigidity, respectively, as they attest the cusp configuration of the mechanism a third-order rigidity, which conflicts with its continuous flexion. Some attempts were done to resolve the dilemma but they could not settle the problem. As cusp mechanisms demonstrate the basic shortcoming of any local mobility analysis using higher-order constraints, we present a global approach inspired by Sabitov's finite algorithm for testing the bendability of a polyhedron, which allows us (a) to compute iteratively configurations with a higher-order flexion and (b) to come up with a proper redefinition of higher-order flexibility and rigidity. We also give algorithms for computing the flexion orders as well as the associated flexes. The presented approach is demonstrated on several examples (double-Watt mechanisms and Tarnai's Leonardo structure). Moreover, we determine all configurations of a given 3-RPR manipulator with a third-order flexion and present a corresponding joint-bar framework of flexion order 23.
5/27/2024