Modular Multi-Rotors: From Quadrotors to Fully-Actuated Aerial Vehicles
2202.00788
0
0
📉
Abstract
Traditional aerial vehicles have specific characteristics to perform specific tasks but designing a versatile vehicle that can adapt depending on the task is still a challenge. Based on modularity, we propose an aerial robotic system that can increase its payload capacity and actuated degrees of freedom by reconfiguring heterogeneous modules to adapt to different task specifications. The system consists of cuboid modules propelled by quadrotors with tilted rotors. We present two module designs with different actuation properties. By assembling different types of modules, H-ModQuad can increase its actuated degrees of freedom from 4 to 5 and 6 depending on its configuration. By extending the concept of actuation ellipsoids, we find the body frame of a vehicle with which the controller can maximize the maximum thrust. We use polytopes to represent the actuation capability of the vehicles and examine them against task requirements. We derive the modular vehicles' dynamics and propose a general control strategy that applies for all possible numbers of actuated degrees of freedom. The design is validated with simulations and experiments using actual robots, showing that the modular vehicles provide different actuation properties.
Create account to get full access
Overview
- Designing a versatile aerial vehicle that can adapt to different tasks is still a challenge
- This research proposes a modular aerial robotic system called H-ModQuad that can reconfigure its payload capacity and degrees of freedom
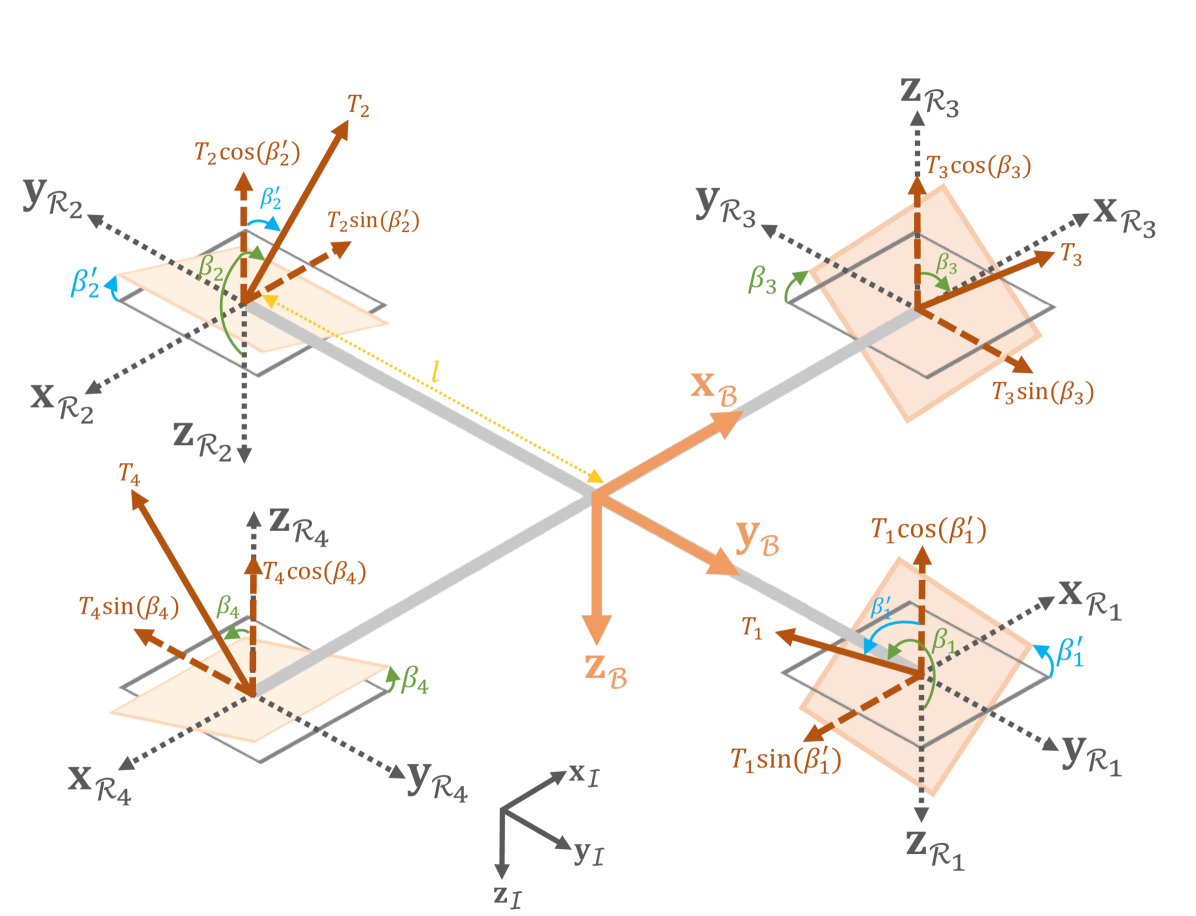
- The system consists of cuboid modules propelled by quadrotors with tilted rotors
- Different module designs provide varying actuation properties, allowing the system to have 4, 5, or 6 actuated degrees of freedom
Plain English Explanation
Traditional aerial vehicles, like drones or helicopters, are designed to perform specific tasks efficiently. However, creating a versatile vehicle that can adapt and change based on the task at hand is still a challenge. This research proposes a new type of modular aerial robot system called H-ModQuad that can reconfigure itself to increase its payload capacity and the number of ways it can move and be controlled.
The H-ModQuad system is made up of cube-shaped modules, each with its own set of propellers. These modules can be assembled in different ways to create a larger vehicle with more capabilities. For example, by combining certain modules, the system can go from having 4 degrees of freedom (up/down, left/right, forward/backward, and rotation) to 5 or even 6 degrees of freedom, allowing for more complex movements and tasks.
The researchers developed two different module designs, each with their own strengths in terms of how the propellers are arranged and controlled. By mixing and matching these modules, the H-ModQuad system can adapt its capabilities to suit different needs, whether that's carrying heavier payloads, maneuvering in tighter spaces, or performing more acrobatic movements.
The key innovation here is the modular, reconfigurable nature of the system, which allows it to be customized for different applications, rather than being a one-size-fits-all design. This flexibility could make the H-ModQuad system useful for a wide range of aerial robotics tasks, from experimental system design for active fault-tolerant quadrotors to generating 6D trajectories for omnidirectional multirotors and even self-reconfigurable aerial robots.
Technical Explanation
The H-ModQuad system consists of cuboid modules, each propelled by a quadrotor with tilted rotors. The researchers present two different module designs, each with varying actuation properties. By assembling different combinations of these modules, the H-ModQuad system can increase its actuated degrees of freedom from 4 to 5 or even 6.
To determine the best configuration for a given task, the researchers use the concept of "actuation ellipsoids" to find the body frame of the vehicle that will maximize the maximum thrust. They represent the actuation capability of the modules using polytopes and examine them against the task requirements.
The researchers also derive the dynamics of the modular vehicles and propose a general control strategy that can be applied regardless of the number of actuated degrees of freedom. This allows the system to adapt its control to match its current configuration.
The researchers validate their design through simulations and experiments using actual robots, demonstrating that the modular approach provides different actuation properties that can be tailored to specific needs. This flexibility could make the H-ModQuad system useful for a wide range of modular, resilient, and scalable system design approaches in aerial robotics, including open-source modular autonomous electric vehicles.
Critical Analysis
The research presents a novel and promising approach to designing versatile aerial vehicles through modular reconfiguration. By allowing the system to adapt its capabilities, the H-ModQuad can potentially be used for a wider range of tasks compared to traditional fixed-design aerial robots.
However, the paper does not address some potential limitations or challenges of the modular approach. For example, the complexity of the system may make it more difficult to control and coordinate the various modules, especially during complex maneuvers. There are also likely tradeoffs in terms of weight, cost, and overall system reliability that should be explored further.
Additionally, the experimental validation is limited to simulations and small-scale prototypes. Scaling up the modular system to larger, more capable vehicles would introduce new engineering challenges that should be considered.
Despite these potential issues, the core idea of a reconfigurable aerial robot system is compelling and worth further research and development. Continued work in this area could lead to a new generation of adaptable aerial vehicles that can be tailored to a wide variety of applications in fields like experimental system design for active fault-tolerant quadrotors, generating 6D trajectories for omnidirectional multirotors, and even self-reconfigurable aerial robots.
Conclusion
This research proposes a novel modular aerial robotic system called H-ModQuad that can reconfigure its payload capacity and actuated degrees of freedom by assembling different types of propeller-driven modules. By allowing the system to adapt its capabilities to different task requirements, the H-ModQuad approach represents a promising step towards more versatile and customizable aerial vehicles.
The modular design, dynamic modeling, and control strategies described in this paper could have significant implications for the development of modular, resilient, and scalable system design approaches in aerial robotics, potentially leading to new applications in areas like open-source modular autonomous electric vehicles. Further research is needed to address the challenges and limitations of this approach, but the core concept of a reconfigurable aerial system is an exciting development in the field of robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Experimental System Design of an Active Fault-Tolerant Quadrotor
Jennifer Yeom, Roshan Balu T M B, Guanrui Li, Giuseppe Loianno
0
0
Quadrotors have gained popularity over the last decade, aiding humans in complex tasks such as search and rescue, mapping and exploration. Despite their mechanical simplicity and versatility compared to other types of aerial vehicles, they remain vulnerable to rotor failures. In this paper, we propose an algorithmic and mechanical approach to addressing the quadrotor fault-tolerant problem in case of rotor failures. First, we present a fault-tolerant detection and control scheme that includes various attitude error metrics. The scheme transitions to a fault-tolerant control mode by surrendering the yaw control. Subsequently, to ensure compatibility with platform sensing constraints, we investigate the relationship between variations in robot rotational drag, achieved through a modular mechanical design appendage, resulting in yaw rates within sensor limits. This analysis offers a platform-agnostic framework for designing more reliable and robust quadrotors in the event of rotor failures. Extensive experimental results validate the proposed approach providing insights into successfully designing a cost-effective quadrotor capable of fault-tolerant control. The overall design enhances safety in scenarios of faulty rotors, without the need for additional sensors or computational resources.
4/10/2024

Generating 6-D Trajectories for Omnidirectional Multirotor Aerial Vehicles in Cluttered Environments
Peiyan Liu, Yuanzhe Shen, Yueqian Liu, Fengyu Quan, Can Wang, Haoyao Chen
0
0
As fully-actuated systems, omnidirectional multirotor aerial vehicles (OMAVs) have more flexible maneuverability and advantages in aggressive flight in cluttered environments than traditional underactuated MAVs. %Due to the high dimensionality of configuration space, making the designed trajectory generation algorithm efficient is challenging. This paper aims to achieve safe flight of OMAVs in cluttered environments. Considering existing static obstacles, an efficient optimization-based framework is proposed to generate 6-D $SE(3)$ trajectories for OMAVs. Given the kinodynamic constraints and the 3D collision-free region represented by a series of intersecting convex polyhedra, the proposed method finally generates a safe and dynamically feasible 6-D trajectory. First, we parameterize the vehicle's attitude into a free 3D vector using stereographic projection to eliminate the constraints inherent in the $SO(3)$ manifold, while the complete $SE(3)$ trajectory is represented as a 6-D polynomial in time without inherent constraints. The vehicle's shape is modeled as a cuboid attached to the body frame to achieve whole-body collision evaluation. Then, we formulate the origin trajectory generation problem as a constrained optimization problem. The original constrained problem is finally transformed into an unconstrained one that can be solved efficiently. To verify the proposed framework's performance, simulations and real-world experiments based on a tilt-rotor hexarotor aerial vehicle are carried out.
4/17/2024

Reconfiguration Algorithms for Cubic Modular Robots with Realistic Movement Constraints
NASA Space Robots Team, Josh Brunner, Kenneth C. Cheung, Erik D. Demaine, Jenny Diomidova, Christine Gregg, Della H. Hendrickson, Irina Kostitsyna
0
0
We introduce and analyze a model for self-reconfigurable robots made up of unit-cube modules. Compared to past models, our model aims to newly capture two important practical aspects of real-world robots. First, modules often do not occupy an exact unit cube, but rather have features like bumps extending outside the allotted space so that modules can interlock. Thus, for example, our model forbids modules from squeezing in between two other modules that are one unit distance apart. Second, our model captures the practical scenario of many passive modules assembled by a single robot, instead of requiring all modules to be able to move on their own. We prove two universality results. First, with a supply of auxiliary modules, we show that any connected polycube structure can be constructed by a carefully aligned plane sweep. Second, without additional modules, we show how to construct any structure for which a natural notion of external feature size is at least a constant; this property largely consolidates forbidden-pattern properties used in previous works on reconfigurable modular robots.
5/27/2024
Nonlinear Model Predictive Control of Tiltrotor Quadrotors with Feasible Control Allocation
Zeinab Shayan, Jann Cristobal, Mohammadreza Izadi, Amin Yazdanshenas, Mehdi Naderi, Reza Faieghi
0
0
This paper presents a new flight control framework for tilt-rotor multirotor uncrewed aerial vehicles (MRUAVs). Tiltrotor designs offer full actuation but introduce complexity in control allocation due to actuator redundancy. We propose a new approach where the allocator is tightly coupled with the controller, ensuring that the control signals generated by the controller are feasible within the vehicle actuation space. We leverage nonlinear model predictive control (NMPC) to implement the above framework, providing feasible control signals and optimizing performance. This unified control structure simultaneously manages both position and attitude, which eliminates the need for cascaded position and attitude control loops. Extensive numerical experiments demonstrate that our approach significantly outperforms conventional techniques that are based on linear quadratic regulator (LQR) and sliding mode control (SMC), especially in high-acceleration trajectories and disturbance rejection scenarios, making the proposed approach a viable option for enhanced control precision and robustness, particularly in challenging missions.
6/26/2024