GPU-Accelerated Optimization-Based Collision Avoidance

0
Sign in to get full access
Overview
- This paper presents a GPU-accelerated optimization-based approach for collision avoidance in autonomous systems.
- It leverages GPU parallelization to efficiently solve the collision avoidance optimization problem in real-time.
- The method aims to enable safe navigation for autonomous vehicles, drones, and other robotic systems operating in complex environments.
Plain English Explanation
The paper describes a new way to help autonomous systems like self-driving cars and drones avoid collisions. It uses a mathematical optimization technique that runs very quickly on graphics processing units (GPUs) to figure out the best way to move the system and avoid hitting obstacles.
This builds on previous work on optimization-based collision avoidance and velocity obstacle approaches, but the key innovation is using GPUs to solve the optimization problem much faster than before.
This allows the collision avoidance system to react quickly to dynamic environments and make real-time decisions to safely navigate around obstacles. The authors show this GPU-accelerated approach outperforms CPU-based methods in terms of computation time, which is crucial for autonomous systems that need to make split-second decisions to avoid collisions.
Technical Explanation
The paper presents a GPU-accelerated optimization-based framework for real-time collision avoidance in autonomous systems. The core of the approach is a nonlinear optimization problem that computes the optimal control inputs to navigate the system around obstacles while satisfying various constraints.
To enable real-time performance, the authors leverage the massive parallelism of GPUs to efficiently solve this optimization problem. They formulate the collision avoidance as a quadratic program that can be solved using GPU-accelerated quadratic programming solvers.
The authors evaluate their approach in simulation and show that the GPU-accelerated solver can provide collision-free trajectories at high update rates, outperforming a CPU-based solver by over an order of magnitude in computation time. This enables the collision avoidance system to quickly adapt to dynamic environments and safely guide autonomous systems through cluttered spaces.
The approach builds upon prior work on optimization-based collision avoidance, velocity obstacle methods, and interaction-aware motion planning. However, the key novelty is the use of GPU parallelization to dramatically improve the computational efficiency of the optimization-based collision avoidance.
Critical Analysis
The paper presents a promising approach for real-time collision avoidance in autonomous systems, with the GPU-accelerated optimization solving the key computational bottleneck. However, the evaluation is limited to simulation experiments, and further real-world testing would be needed to assess the robustness and reliability of the method in complex, dynamic environments.
Additionally, the paper does not discuss the potential limitations or edge cases of the optimization-based approach, such as how it might handle highly constrained or non-convex environments. There could also be concerns about the safety and reliability of an optimization-based system, which would need to be carefully analyzed and validated.
Overall, the GPU-accelerated optimization-based collision avoidance framework represents an interesting advance, but further research and real-world validation would be needed to fully assess its capabilities and limitations for autonomous systems operating in complex, dynamic environments.
Conclusion
This paper presents a novel GPU-accelerated optimization-based approach for real-time collision avoidance in autonomous systems. By leveraging the parallelism of GPUs, the authors are able to solve the underlying optimization problem much faster than previous CPU-based methods, enabling the collision avoidance system to quickly adapt to dynamic environments.
The GPU-accelerated collision avoidance framework has the potential to significantly improve the safety and reliability of autonomous vehicles, drones, and other robotic systems operating in cluttered, unpredictable spaces. While further real-world testing and validation would be needed, the core ideas and techniques presented in this work represent an important advance in the field of autonomous navigation and motion planning.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GPU-Accelerated Optimization-Based Collision Avoidance
Zeming Wu, Zhuping Wang, Hao Zhang
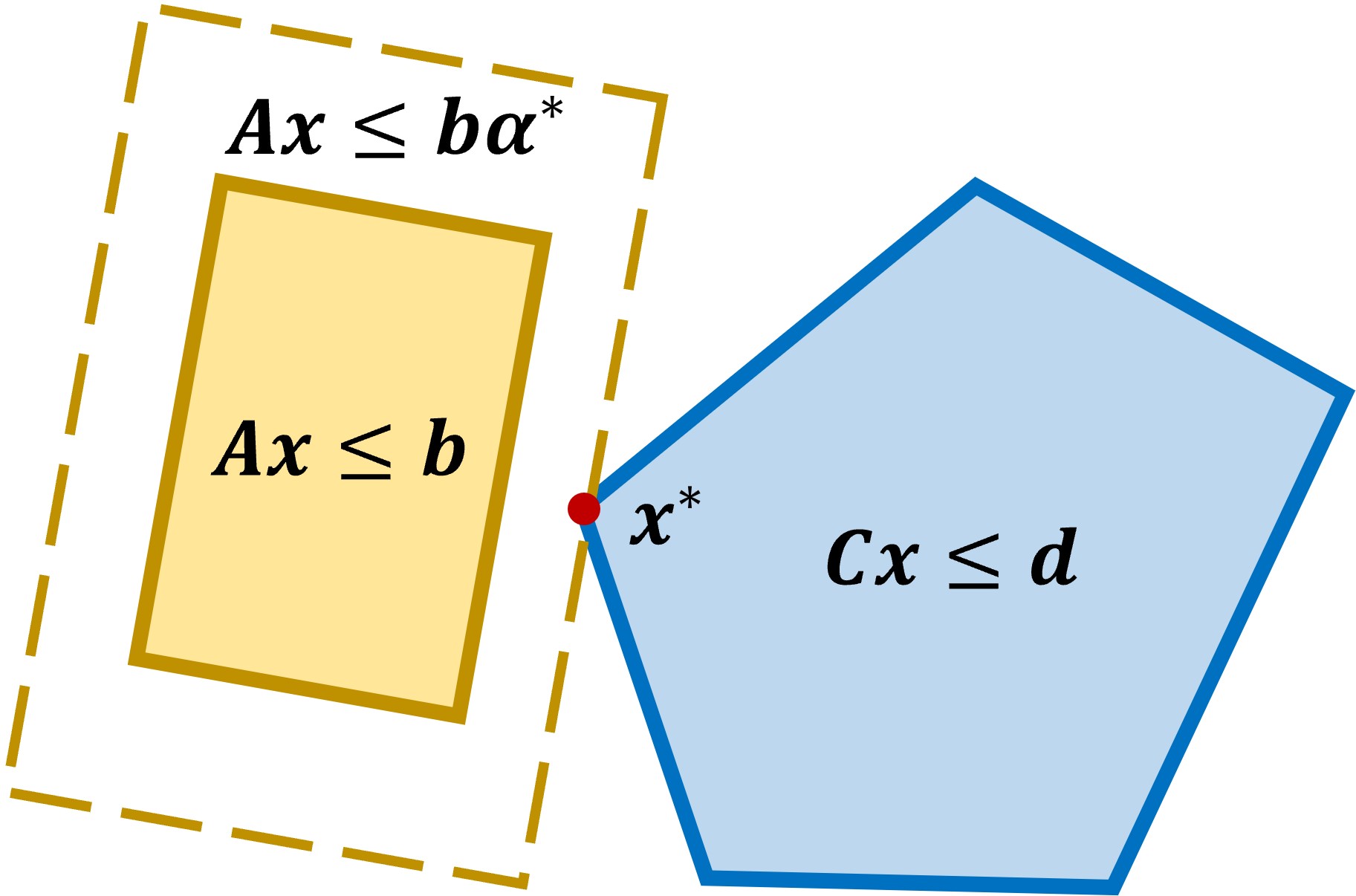
This paper proposes a GPU-accelerated optimization framework for collision avoidance problems where the controlled objects and the obstacles can be modeled as the finite union of convex polyhedra. A novel collision avoidance constraint is proposed based on scale-based collision detection and the strong duality of convex optimization. Under this constraint, the high-dimensional non-convex optimization problems of collision avoidance can be decomposed into several low-dimensional quadratic programmings (QPs) following the paradigm of alternating direction method of multipliers (ADMM). Furthermore, these low-dimensional QPs can be solved parallel with GPUs, significantly reducing computational time. High-fidelity simulations are conducted to validate the proposed method's effectiveness and practicality.
Read more6/12/2024

0
Efficient optimization-based trajectory planning
Jiayu Fan, Nikolce Murgovski, Jun Liang
This research addresses the increasing demand for advanced navigation systems capable of operating within confined surroundings. A significant challenge in this field is developing an efficient planning framework that can generalize across various types of collision avoidance missions. Utilizing numerical optimal control techniques, this study proposes a unified optimization-based planning framework to meet these demands. We focus on handling two collision avoidance problems, i.e., the object not colliding with obstacles and not colliding with boundaries of the constrained region. The object or obstacle is denoted as a union of convex polytopes and ellipsoids, and the constrained region is denoted as an intersection of such convex sets. Using these representations, collision avoidance can be approached by formulating explicit constraints that separate two convex sets, or ensure that a convex set is contained in another convex set, referred to as separating constraints and containing constraints, respectively. We propose to use the hyperplane separation theorem to formulate differentiable separating constraints, and utilize the S-procedure and geometrical methods to formulate smooth containing constraints. We state that compared to the state of the art, the proposed formulations allow a considerable reduction in nonlinear program size and geometry-based initialization in auxiliary variables used to formulate collision avoidance constraints. Finally, the efficacy of the proposed unified planning framework is evaluated in two contexts, autonomous parking in tractor-trailer vehicles and overtaking on curved lanes. The results in both cases exhibit an improved computational performance compared to existing methods.
Read more7/9/2024

0
A Novel Optimization-Based Collision Avoidance For Autonomous On-Orbit Assembly
Siavash Tavana, Sepideh Faghihi, Anton de Ruiter, Krishna Dev Kumar
The collision avoidance constraints are prominent as non-convex, non-differentiable, and challenging when defined in optimization-based motion planning problems. To overcome these issues, this paper presents a novel non-conservative collision avoidance technique using the notion of convex optimization to establish the distance between robotic spacecraft and space structures for autonomous on-orbit assembly operations. The proposed technique defines each ellipsoidal- and polyhedral-shaped object as the union of convex compact sets, each represented non-conservatively by a real-valued convex function. Then, the functions are introduced as a set of constraints to a convex optimization problem to produce a new set of differentiable constraints resulting from the optimality conditions. These new constraints are later fed into an optimal control problem to enforce collision avoidance where the motion planning for the autonomous on-orbit assembly takes place. Numerical experiments for two assembly scenarios in tight environments are presented to demonstrate the capability and effectiveness of the proposed technique. The results show that this framework leads to optimal non-conservative trajectories for robotic spacecraft in tight environments. Although developed for autonomous on-orbit assembly, this technique could be used for any generic motion planning problem where collision avoidance is crucial.
Read more4/16/2024
📊
0
Velocity Obstacle for Polytopic Collision Avoidance for Distributed Multi-robot Systems
Jihao Huang, Jun Zeng, Xuemin Chi, Koushil Sreenath, Zhitao Liu, Hongye Su
Obstacle avoidance for multi-robot navigation with polytopic shapes is challenging. Existing works simplify the system dynamics or consider it as a convex or non-convex optimization problem with positive distance constraints between robots, which limits real-time performance and scalability. Additionally, generating collision-free behavior for polytopic-shaped robots is harder due to implicit and non-differentiable distance functions between polytopes. In this paper, we extend the concept of velocity obstacle (VO) principle for polytopic-shaped robots and propose a novel approach to construct the VO in the function of vertex coordinates and other robot's states. Compared with existing work about obstacle avoidance between polytopic-shaped robots, our approach is much more computationally efficient as the proposed approach for construction of VO between polytopes is optimization-free. Based on VO representation for polytopic shapes, we later propose a navigation approach for distributed multi-robot systems. We validate our proposed VO representation and navigation approach in multiple challenging scenarios including large-scale randomized tests, and our approach outperforms the state of art in many evaluation metrics, including completion rate, deadlock rate, and the average travel distance.
Read more6/11/2024