Velocity Obstacle for Polytopic Collision Avoidance for Distributed Multi-robot Systems

0
📊
Sign in to get full access
Overview
- Obstacle avoidance for multi-robot navigation with polytopic (polygonal) shapes is a challenging problem
- Existing approaches simplify the system dynamics or treat it as an optimization problem with distance constraints between robots, which limits real-time performance and scalability
- Generating collision-free behavior for polytopic-shaped robots is harder due to implicit and non-differentiable distance functions between polytopes
- This paper extends the concept of velocity obstacle (VO) principle to work with polytopic-shaped robots and proposes a novel, computationally efficient approach to construct the VO
Plain English Explanation
This paper addresses the challenge of enabling multiple robots with polygonal shapes to navigate and avoid collisions with each other in real-time. Existing approaches often simplify the problem by making assumptions about the robot shapes or formulating it as an optimization problem with distance constraints. However, this can limit the performance and scalability of the system, especially when dealing with more complex polygonal shapes.
The key innovation in this paper is a new way to represent the "velocity obstacle" for polygonal robots. The velocity obstacle is a concept that describes the set of velocities that would lead to a collision. By extending this to work with polygons instead of just circles or other simple shapes, the researchers developed a more accurate and efficient way to plan collision-free motions for multi-robot systems.
Their approach is more computationally efficient than previous methods because it avoids the need for optimization when constructing the velocity obstacle. Instead, it calculates the velocity obstacle directly from the vertex coordinates of the polygonal robots and their current states. This makes the collision avoidance algorithm faster and able to handle larger numbers of robots.
The researchers validated their approach through extensive testing in challenging scenarios, showing that it outperforms the state-of-the-art in metrics like completion rate, deadlock rate, and travel distance. This advance in polygonal robot navigation could enable more robust and scalable multi-robot systems for applications like warehouse automation, autonomous driving, and aerospace.
Technical Explanation
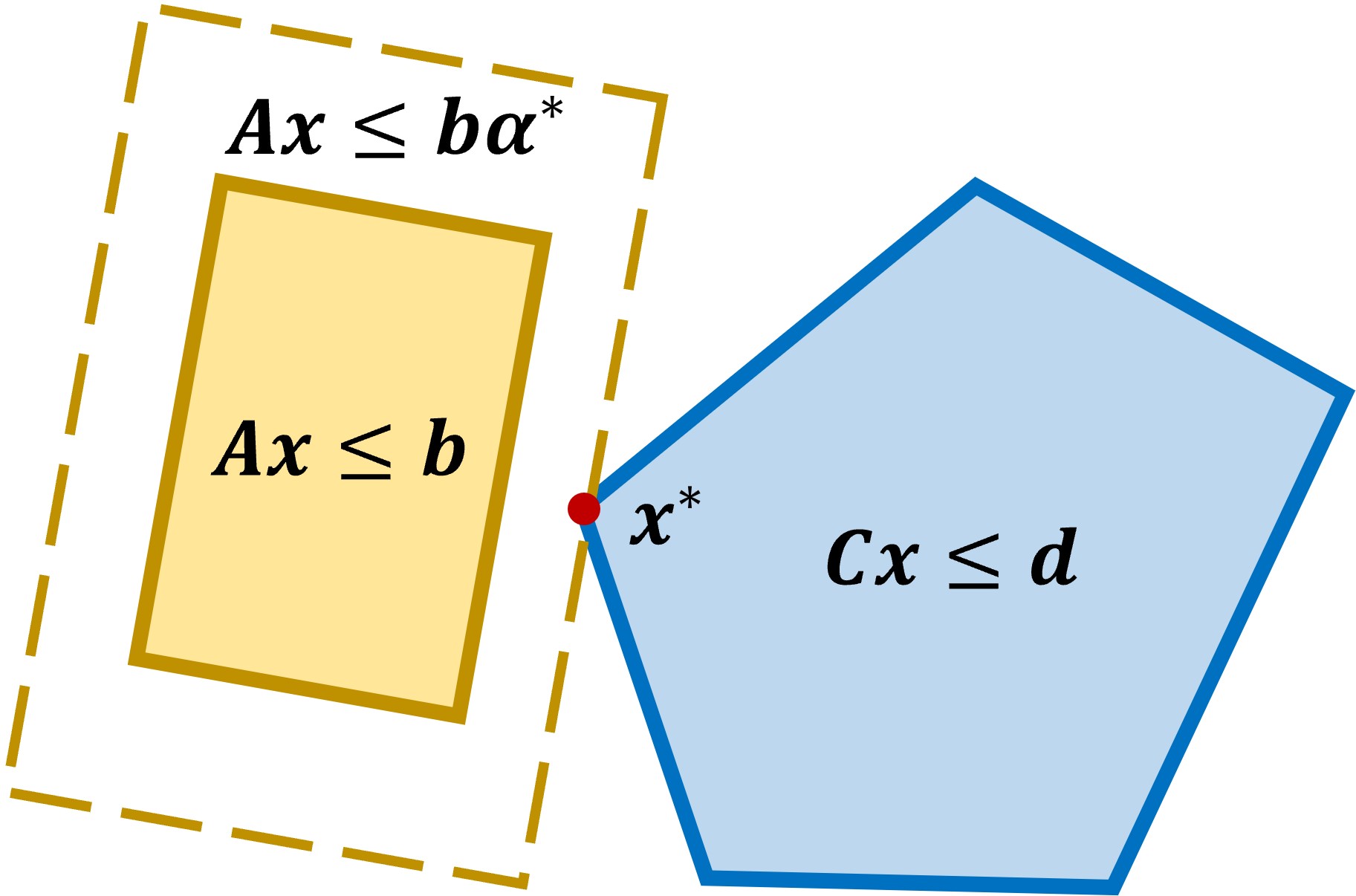
The paper proposes a novel approach to construct the velocity obstacle (VO) for polytopic-shaped robots in a computationally efficient manner. Unlike previous work that treated the problem as a convex or non-convex optimization problem with distance constraints, the researchers developed a direct method to calculate the VO based on the vertex coordinates and states of the robots.
This is achieved by representing the VO as a function of the vertex coordinates and other robot states, rather than relying on implicit and non-differentiable distance functions between polytopes. The resulting VO representation is optimization-free, making the overall collision avoidance approach much more computationally efficient.
Building on this VO representation for polytopic shapes, the paper then presents a distributed multi-robot navigation strategy. This allows a team of robots with polygonal footprints to plan collision-free trajectories in real-time.
The proposed approach is validated through extensive simulation experiments, including large-scale randomized tests. The results show that it outperforms the state-of-the-art methods in key metrics such as completion rate, deadlock rate, and average travel distance.
Critical Analysis
The paper presents a compelling and technically sound solution to the challenge of multi-robot navigation with polytopic shapes. By developing a more efficient VO representation, the researchers have addressed a key limitation of prior work in this area.
One potential caveat is that the paper focuses on simulation-based validation, and further real-world testing would be needed to fully assess the approach's performance and robustness. Additionally, the paper does not delve into the theoretical guarantees or edge cases of the proposed VO construction method, which could be an area for further analysis and refinement.
More broadly, the field of multi-robot navigation continues to evolve rapidly, with ongoing research into decentralized planning, trajectory optimization, and hybrid control strategies. As such, it will be important for the authors to closely monitor developments in the field and continue to advance their work to maintain a competitive edge.
Conclusion
This paper presents a novel and computationally efficient approach for obstacle avoidance in multi-robot navigation with polytopic shapes. By extending the velocity obstacle principle to work with polygonal robots, the researchers have developed a more accurate and scalable solution compared to previous methods.
The key innovation is the optimization-free construction of the velocity obstacle, which enables real-time performance and the ability to handle larger numbers of robots. Extensive simulations demonstrate the effectiveness of the proposed approach, outperforming the state-of-the-art in several important metrics.
This advance in multi-robot navigation with polytopic shapes could have significant implications for a wide range of applications, from warehouse automation and autonomous driving to aerospace systems. As the field continues to evolve, the techniques introduced in this paper represent an important step forward in enabling robust and scalable multi-agent coordination.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📊
0
Velocity Obstacle for Polytopic Collision Avoidance for Distributed Multi-robot Systems
Jihao Huang, Jun Zeng, Xuemin Chi, Koushil Sreenath, Zhitao Liu, Hongye Su
Obstacle avoidance for multi-robot navigation with polytopic shapes is challenging. Existing works simplify the system dynamics or consider it as a convex or non-convex optimization problem with positive distance constraints between robots, which limits real-time performance and scalability. Additionally, generating collision-free behavior for polytopic-shaped robots is harder due to implicit and non-differentiable distance functions between polytopes. In this paper, we extend the concept of velocity obstacle (VO) principle for polytopic-shaped robots and propose a novel approach to construct the VO in the function of vertex coordinates and other robot's states. Compared with existing work about obstacle avoidance between polytopic-shaped robots, our approach is much more computationally efficient as the proposed approach for construction of VO between polytopes is optimization-free. Based on VO representation for polytopic shapes, we later propose a navigation approach for distributed multi-robot systems. We validate our proposed VO representation and navigation approach in multiple challenging scenarios including large-scale randomized tests, and our approach outperforms the state of art in many evaluation metrics, including completion rate, deadlock rate, and the average travel distance.
Read more6/11/2024
🤯
0
New!Multi-Agent Obstacle Avoidance using Velocity Obstacles and Control Barrier Functions
Alejandro S'anchez Roncero, Rafael I. Cabral Muchacho, Petter Ogren
Velocity Obstacles (VO) methods form a paradigm for collision avoidance strategies among moving obstacles and agents. While VO methods perform well in simple multi-agent environments, they don't guarantee safety and can show overly conservative behavior in common situations. In this paper, we propose to combine a VO-strategy for guidance with a CBF-approach for safety, which overcomes the overly conservative behavior of VOs and formally guarantees safety. We validate our method in a baseline comparison study, using 2nd order integrator and car-like dynamics. Results support that our method outperforms the baselines w.r.t. path smoothness, collision avoidance, and success rates.
Read more9/17/2024
0
GPU-Accelerated Optimization-Based Collision Avoidance
Zeming Wu, Zhuping Wang, Hao Zhang
This paper proposes a GPU-accelerated optimization framework for collision avoidance problems where the controlled objects and the obstacles can be modeled as the finite union of convex polyhedra. A novel collision avoidance constraint is proposed based on scale-based collision detection and the strong duality of convex optimization. Under this constraint, the high-dimensional non-convex optimization problems of collision avoidance can be decomposed into several low-dimensional quadratic programmings (QPs) following the paradigm of alternating direction method of multipliers (ADMM). Furthermore, these low-dimensional QPs can be solved parallel with GPUs, significantly reducing computational time. High-fidelity simulations are conducted to validate the proposed method's effectiveness and practicality.
Read more6/12/2024

0
A Novel Optimization-Based Collision Avoidance For Autonomous On-Orbit Assembly
Siavash Tavana, Sepideh Faghihi, Anton de Ruiter, Krishna Dev Kumar
The collision avoidance constraints are prominent as non-convex, non-differentiable, and challenging when defined in optimization-based motion planning problems. To overcome these issues, this paper presents a novel non-conservative collision avoidance technique using the notion of convex optimization to establish the distance between robotic spacecraft and space structures for autonomous on-orbit assembly operations. The proposed technique defines each ellipsoidal- and polyhedral-shaped object as the union of convex compact sets, each represented non-conservatively by a real-valued convex function. Then, the functions are introduced as a set of constraints to a convex optimization problem to produce a new set of differentiable constraints resulting from the optimality conditions. These new constraints are later fed into an optimal control problem to enforce collision avoidance where the motion planning for the autonomous on-orbit assembly takes place. Numerical experiments for two assembly scenarios in tight environments are presented to demonstrate the capability and effectiveness of the proposed technique. The results show that this framework leads to optimal non-conservative trajectories for robotic spacecraft in tight environments. Although developed for autonomous on-orbit assembly, this technique could be used for any generic motion planning problem where collision avoidance is crucial.
Read more4/16/2024