GRANP: A Graph Recurrent Attentive Neural Process Model for Vehicle Trajectory Prediction

0
Sign in to get full access
Related Work
Vehicle Trajectory Prediction
Vehicle trajectory prediction is an important task in autonomous driving and intelligent transportation systems. Existing approaches have explored various techniques, such as HPNET: Dynamic Trajectory Forecasting with Historical Prediction Attention, which uses historical data and attention mechanisms to forecast future trajectories, and TrajPred: Trajectory Prediction with Region-based Relation Learning, which models the interactions between vehicles and the surrounding environment.
Graph Neural Networks for Trajectory Similarity
Researchers have also investigated the use of graph neural networks (GNNs) for vehicle trajectory similarity search, as seen in VeTRASS: Vehicle Trajectory Similarity Search through Graph. GNNs can effectively capture the spatial-temporal relationships between vehicles and their surrounding context.
Graph-based Predictions in Other Domains
The application of GNNs has extended beyond vehicle trajectory prediction, with studies exploring their use in other domains, such as GNN-based Probabilistic Supply and Inventory Predictions and STMGF: An Effective Spatial-Temporal Multi-Granularity Framework for supply chain forecasting.
Plain English Explanation
The paper proposes a novel model called GRANP (Graph Recurrent Attentive Neural Process) for predicting the future trajectories of vehicles. Vehicle trajectory prediction is crucial for autonomous driving and intelligent transportation systems, as it helps anticipate the movements of vehicles and plan accordingly.
The key idea behind GRANP is to leverage graph neural networks (GNNs) to capture the complex spatial-temporal relationships between vehicles and their surrounding context. GNNs are well-suited for this task as they can effectively model the interactions between different entities (vehicles) and their environment.
GRANP combines the power of GNNs with recurrent neural networks (RNNs) and attention mechanisms to make accurate predictions. The recurrent component allows the model to incorporate historical information, while the attention mechanism helps it focus on the most relevant spatial and temporal features when making predictions.
Technical Explanation
The GRANP model consists of several key components:
-
Graph Encoder: This module encodes the input data, which includes the current and historical trajectories of vehicles, as well as contextual information about the environment (e.g., road networks, traffic signals), into a graph representation.
-
Recurrent Attentive Graph Neural Network: This is the core of the GRANP model, which uses a recurrent structure and attention mechanisms to process the graph-encoded data and predict future vehicle trajectories.
-
Decoding Module: This component takes the output of the Recurrent Attentive Graph Neural Network and generates the final predicted trajectories for each vehicle.
The model is trained end-to-end using a combination of reconstruction loss (to ensure the predicted trajectories match the ground truth) and adversarial loss (to improve the realism of the predictions).
The authors evaluate GRANP on several benchmark datasets for vehicle trajectory prediction and demonstrate its superior performance compared to state-of-the-art methods.
Critical Analysis
The paper presents a well-designed and comprehensive approach to vehicle trajectory prediction using graph neural networks. The authors have clearly identified the strengths of GNNs in modeling the complex spatial-temporal relationships between vehicles and their environment, and have successfully incorporated this into their GRANP model.
One potential limitation of the research is the reliance on specific datasets for evaluation. While the authors have used standard benchmarks, it would be valuable to see how the model performs on a wider range of scenarios and datasets, including real-world deployment conditions.
Additionally, the paper could have delved deeper into the interpretability of the model's predictions and the potential biases or limitations in the underlying data and algorithms. Understanding the model's decision-making process and its potential pitfalls would be important for real-world applications, especially in safety-critical domains like autonomous driving.
Conclusion
The GRANP model proposed in this paper represents a significant advancement in the field of vehicle trajectory prediction. By leveraging the power of graph neural networks, the model can effectively capture the complex spatial-temporal relationships that govern vehicle movements, leading to more accurate and realistic predictions.
The researchers have demonstrated the model's strong performance on benchmark datasets, suggesting its potential for real-world applications in autonomous driving and intelligent transportation systems. As the field of vehicle trajectory prediction continues to evolve, the GRANP model and its underlying principles could serve as a valuable foundation for further research and development.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
GRANP: A Graph Recurrent Attentive Neural Process Model for Vehicle Trajectory Prediction
Yuhao Luo, Kehua Chen, Meixin Zhu
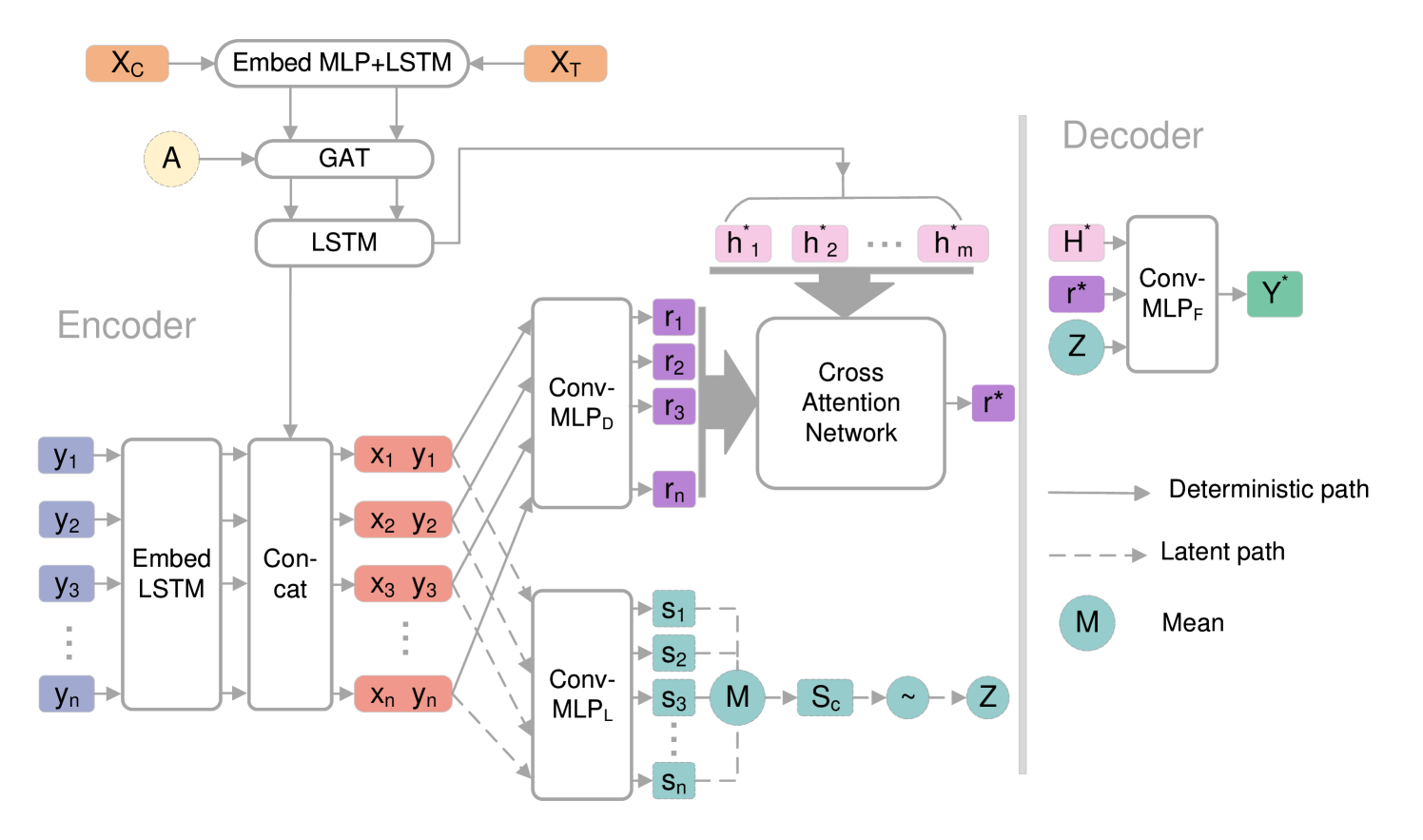
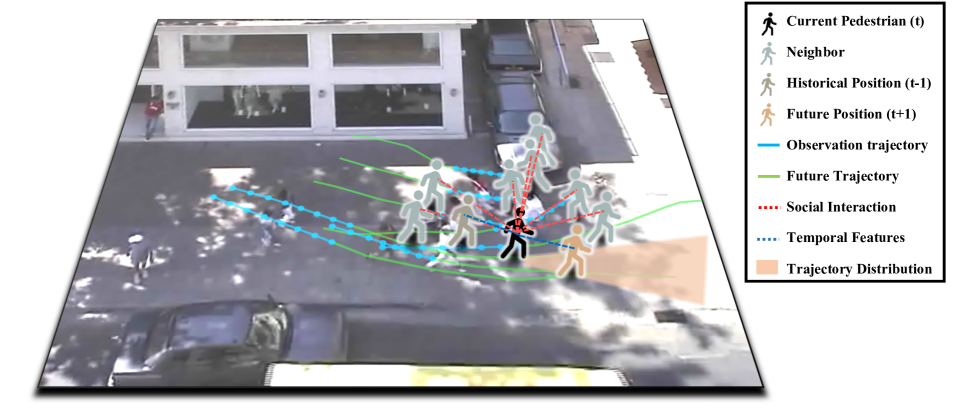
As a vital component in autonomous driving, accurate trajectory prediction effectively prevents traffic accidents and improves driving efficiency. To capture complex spatial-temporal dynamics and social interactions, recent studies developed models based on advanced deep-learning methods. On the other hand, recent studies have explored the use of deep generative models to further account for trajectory uncertainties. However, the current approaches demonstrating indeterminacy involve inefficient and time-consuming practices such as sampling from trained models. To fill this gap, we proposed a novel model named Graph Recurrent Attentive Neural Process (GRANP) for vehicle trajectory prediction while efficiently quantifying prediction uncertainty. In particular, GRANP contains an encoder with deterministic and latent paths, and a decoder for prediction. The encoder, including stacked Graph Attention Networks, LSTM and 1D convolutional layers, is employed to extract spatial-temporal relationships. The decoder is used to learn a latent distribution and thus quantify prediction uncertainty. To reveal the effectiveness of our model, we evaluate the performance of GRANP on the highD dataset. Extensive experiments show that GRANP achieves state-of-the-art results and can efficiently quantify uncertainties. Additionally, we undertake an intuitive case study that showcases the interpretability of the proposed approach. The code is available at https://github.com/joy-driven/GRANP.
Read more4/15/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024

0
Temporal Graph Learning Recurrent Neural Network for Traffic Forecasting
Sanghyun Lee, Chanyoung Park
Accurate traffic flow forecasting is a crucial research topic in transportation management. However, it is a challenging problem due to rapidly changing traffic conditions, high nonlinearity of traffic flow, and complex spatial and temporal correlations of road networks. Most existing studies either try to capture the spatial dependencies between roads using the same semantic graph over different time steps, or assume all sensors on the roads are equally likely to be connected regardless of the distance between them. However, we observe that the spatial dependencies between roads indeed change over time, and two distant roads are not likely to be helpful to each other when predicting the traffic flow, both of which limit the performance of existing studies. In this paper, we propose Temporal Graph Learning Recurrent Neural Network (TGLRN) to address these problems. More precisely, to effectively model the nature of time series, we leverage Recurrent Neural Networks (RNNs) to dynamically construct a graph at each time step, thereby capturing the time-evolving spatial dependencies between roads (i.e., microscopic view). Simultaneously, we provide the Adaptive Structure Information to the model, ensuring that close and consecutive sensors are considered to be more important for predicting the traffic flow (i.e., macroscopic view). Furthermore, to endow TGLRN with robustness, we introduce an edge sampling strategy when constructing the graph at each time step, which eventually leads to further improvements on the model performance. Experimental results on four commonly used real-world benchmark datasets show the effectiveness of TGLRN.
Read more6/6/2024

0
Spatiotemporal Forecasting Meets Efficiency: Causal Graph Process Neural Networks
Aref Einizade, Fragkiskos D. Malliaros, Jhony H. Giraldo
Graph Neural Networks (GNNs) have advanced spatiotemporal forecasting by leveraging relational inductive biases among sensors (or any other measuring scheme) represented as nodes in a graph. However, current methods often rely on Recurrent Neural Networks (RNNs), leading to increased runtimes and memory use. Moreover, these methods typically operate within 1-hop neighborhoods, exacerbating the reduction of the receptive field. Causal Graph Processes (CGPs) offer an alternative, using graph filters instead of MLP layers to reduce parameters and minimize memory consumption. This paper introduces the Causal Graph Process Neural Network (CGProNet), a non-linear model combining CGPs and GNNs for spatiotemporal forecasting. CGProNet employs higher-order graph filters, optimizing the model with fewer parameters, reducing memory usage, and improving runtime efficiency. We present a comprehensive theoretical and experimental stability analysis, highlighting key aspects of CGProNet. Experiments on synthetic and real data demonstrate CGProNet's superior efficiency, minimizing memory and time requirements while maintaining competitive forecasting performance.
Read more5/30/2024