HPNet: Dynamic Trajectory Forecasting with Historical Prediction Attention

0

Sign in to get full access
Overview
- This paper proposes a novel neural network architecture called HPNet for dynamic trajectory forecasting.
- HPNet leverages historical prediction attention to improve the accuracy of future trajectory predictions.
- The authors evaluate HPNet on several benchmark datasets and demonstrate its superior performance compared to existing methods.
Plain English Explanation
The goal of this research is to develop a more accurate way to predict how a person or object will move in the future based on their past movements. The researchers created a new artificial intelligence (AI) model called HPNet that uses "historical prediction attention" to make these predictions.
The key idea behind historical prediction attention is that when trying to forecast someone's future trajectory, it's important to pay attention to how that person has been predicted to move in the past. By considering these historical predictions, the model can better understand the patterns and trends in the person's movement and make more accurate forecasts.
The researchers tested their HPNet model on several standard benchmarks for trajectory prediction, and found that it outperformed existing state-of-the-art methods. This suggests that the historical prediction attention mechanism is an effective way to improve the accuracy of trajectory forecasting.
The ability to accurately predict how people and objects will move in the future has many important applications, such as in self-driving cars, robot navigation, and surveillance systems. The improvements offered by HPNet could therefore have a significant impact on these real-world technologies.
Technical Explanation
The core technical innovation of this paper is the HPNet architecture, which introduces a historical prediction attention mechanism to improve dynamic trajectory forecasting.
Traditionally, trajectory forecasting models have relied on processing the past observed locations of an agent to predict their future movements. However, the authors argue that past
The historical prediction attention module in HPNet learns to selectively attend to the agent's past predicted trajectories in order to better capture the underlying patterns and dynamics of their motion. This allows the model to make more accurate forecasts of the agent's future trajectory.
The authors evaluate HPNet on several benchmark datasets for multi-agent trajectory forecasting, including Multi-Agent Long-Term 3D Human Pose, Learning Temporal Cues by Predicting Objects Move, and Intention Conditioned Long-Term Human Egocentric Action. They show that HPNet outperforms previous state-of-the-art methods on standard metrics like Evaluating Pedestrian Trajectory Prediction Methods with Respect to and STMGF: Effective Spatial Temporal Multi-Granularity Framework.
Critical Analysis
The authors acknowledge several limitations of their approach. First, the historical prediction attention mechanism relies on having access to the agent's past predicted trajectories, which may not always be available in real-world settings. Additionally, the model may struggle to generalize to agents with very different movement patterns than those seen during training.
Another potential issue is that the attention mechanism could potentially "overfit" to certain recurring patterns in the training data, causing the model to make poor predictions for agents exhibiting novel behaviors. More research is needed to fully understand the failure modes and robustness of the historical prediction attention approach.
Finally, the paper does not provide much insight into the computational complexity and inference speed of the HPNet architecture compared to simpler trajectory forecasting models. These practical concerns would be important considerations for deploying such a system in time-sensitive applications like autonomous driving.
Conclusion
Overall, this paper presents a promising new approach to dynamic trajectory forecasting that leverages historical prediction information in a novel attention-based neural network architecture. The strong empirical results on benchmark datasets suggest that the historical prediction attention mechanism can lead to substantial improvements in trajectory prediction accuracy.
If the authors can address the limitations outlined above, the HPNet model could have significant impact on real-world applications that require reliable prediction of future motion, such as robot navigation, surveillance, and autonomous vehicles. Further research is needed to fully understand the capabilities and limitations of this technique.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HPNet: Dynamic Trajectory Forecasting with Historical Prediction Attention
Xiaolong Tang, Meina Kan, Shiguang Shan, Zhilong Ji, Jinfeng Bai, Xilin Chen
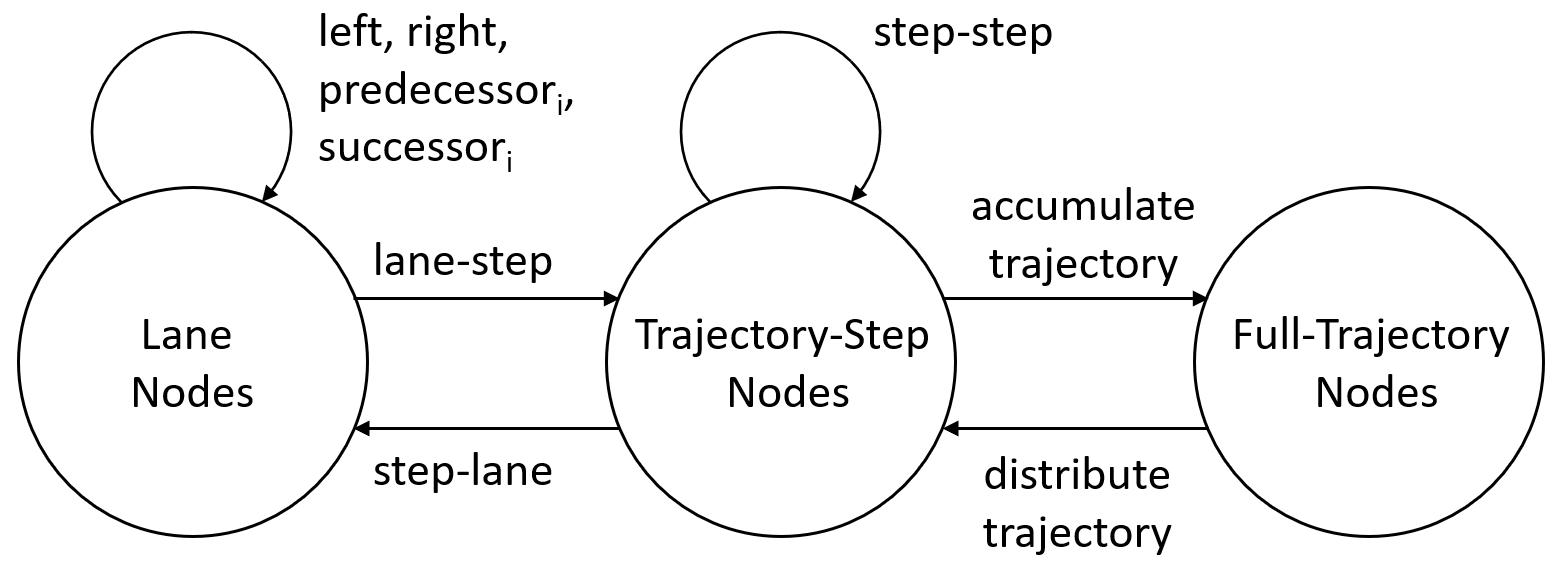
Predicting the trajectories of road agents is essential for autonomous driving systems. The recent mainstream methods follow a static paradigm, which predicts the future trajectory by using a fixed duration of historical frames. These methods make the predictions independently even at adjacent time steps, which leads to potential instability and temporal inconsistency. As successive time steps have largely overlapping historical frames, their forecasting should have intrinsic correlation, such as overlapping predicted trajectories should be consistent, or be different but share the same motion goal depending on the road situation. Motivated by this, in this work, we introduce HPNet, a novel dynamic trajectory forecasting method. Aiming for stable and accurate trajectory forecasting, our method leverages not only historical frames including maps and agent states, but also historical predictions. Specifically, we newly design a Historical Prediction Attention module to automatically encode the dynamic relationship between successive predictions. Besides, it also extends the attention range beyond the currently visible window benefitting from the use of historical predictions. The proposed Historical Prediction Attention together with the Agent Attention and Mode Attention is further formulated as the Triple Factorized Attention module, serving as the core design of HPNet.Experiments on the Argoverse and INTERACTION datasets show that HPNet achieves state-of-the-art performance, and generates accurate and stable future trajectories. Our code are available at https://github.com/XiaolongTang23/HPNet.
Read more4/12/2024
0
Towards Consistent and Explainable Motion Prediction using Heterogeneous Graph Attention
Tobias Demmler, Andreas Tamke, Thao Dang, Karsten Haug, Lars Mikelsons
In autonomous driving, accurately interpreting the movements of other road users and leveraging this knowledge to forecast future trajectories is crucial. This is typically achieved through the integration of map data and tracked trajectories of various agents. Numerous methodologies combine this information into a singular embedding for each agent, which is then utilized to predict future behavior. However, these approaches have a notable drawback in that they may lose exact location information during the encoding process. The encoding still includes general map information. However, the generation of valid and consistent trajectories is not guaranteed. This can cause the predicted trajectories to stray from the actual lanes. This paper introduces a new refinement module designed to project the predicted trajectories back onto the actual map, rectifying these discrepancies and leading towards more consistent predictions. This versatile module can be readily incorporated into a wide range of architectures. Additionally, we propose a novel scene encoder that handles all relations between agents and their environment in a single unified heterogeneous graph attention network. By analyzing the attention values on the different edges in this graph, we can gain unique insights into the neural network's inner workings leading towards a more explainable prediction.
Read more5/17/2024
0
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024

0
Multi-Agent Trajectory Prediction with Difficulty-Guided Feature Enhancement Network
Guipeng Xin, Duanfeng Chu, Liping Lu, Zejian Deng, Yuang Lu, Xigang Wu
Trajectory prediction is crucial for autonomous driving as it aims to forecast the future movements of traffic participants. Traditional methods usually perform holistic inference on the trajectories of agents, neglecting the differences in prediction difficulty among agents. This paper proposes a novel Difficulty-Guided Feature Enhancement Network (DGFNet), which leverages the prediction difficulty differences among agents for multi-agent trajectory prediction. Firstly, we employ spatio-temporal feature encoding and interaction to capture rich spatio-temporal features. Secondly, a difficulty-guided decoder is used to control the flow of future trajectories into subsequent modules, obtaining reliable future trajectories. Then, feature interaction and fusion are performed through the future feature interaction module. Finally, the fused agent features are fed into the final predictor to generate the predicted trajectory distributions for multiple participants. Experimental results demonstrate that our DGFNet achieves state-of-the-art performance on the Argoverse 1&2 motion forecasting benchmarks. Ablation studies further validate the effectiveness of each module. Moreover, compared with SOTA methods, our method balances trajectory prediction accuracy and real-time inference speed.
Read more7/30/2024