Surface Reconstruction from Gaussian Splatting via Novel Stereo Views

0
Sign in to get full access
Overview
- The paper describes a new method for reconstructing 3D surfaces from Gaussian splatting and novel stereo views.
- The technique aims to improve upon existing surface reconstruction approaches by leveraging additional visual cues from multiple camera perspectives.
- Key innovations include a Gaussian splatting technique and a novel stereo matching algorithm to fuse depth information from different views.
Plain English Explanation
The researchers have developed a new way to create 3D models from visual data. Typically, 3D reconstruction involves combining depth information from a single camera to build a surface. This new method goes beyond that by using multiple cameras to get additional visual clues.
The core idea is to "splat" the visual data onto the 3D model in the shape of a Gaussian distribution, which helps capture the uncertainty in the depth measurements. Then, a novel stereo matching algorithm is used to fuse the depth data from the different camera views. This allows the system to resolve ambiguities and inaccuracies that might arise from a single viewpoint.
The end result is a more accurate and complete 3D model compared to traditional single-camera approaches. This could be useful for applications like virtual reality, robotics, or 3D printing, where having a high-quality 3D representation of the real world is important.
Technical Explanation
The paper introduces a new surface reconstruction technique that combines Gaussian splatting and stereo matching from multiple camera views. The key innovations are:
-
Gaussian Splatting: Instead of representing depth as a single value per pixel, the method models it as a Gaussian distribution. This captures the inherent uncertainty in the depth measurements and allows the algorithm to reason about ambiguous regions.
-
Stereo Matching: The system fuses depth information from multiple camera perspectives using a novel stereo matching algorithm. This leverages the complementary visual cues from different viewpoints to resolve depth ambiguities and produce a more complete 3D model.
The paper evaluates the approach on standard 3D reconstruction benchmarks and demonstrates improved performance over state-of-the-art single-view techniques. The qualitative and quantitative results show that the combined Gaussian splatting and stereo matching leads to higher-fidelity 3D surface reconstructions.
Critical Analysis
The paper presents a compelling technical contribution, but there are a few potential limitations and areas for further research:
-
The stereo matching algorithm relies on accurate calibration of the camera system, which may be challenging in real-world settings. Exploring ways to make the method more robust to miscalibration could expand its applicability.
-
The experiments were conducted on controlled, synthetic datasets. Evaluating the approach on more diverse, real-world scenes would help validate its performance in practical scenarios.
-
The computational complexity of the Gaussian splatting and stereo matching steps may limit the scalability of the technique, particularly for large-scale 3D reconstruction tasks. Investigating ways to optimize the algorithms could improve their efficiency.
Overall, the paper introduces a promising new direction for 3D surface reconstruction that leverages multiple viewpoints. Further research to address the potential limitations could lead to even more robust and practical 3D modeling capabilities.
Conclusion
The proposed surface reconstruction method, which combines Gaussian splatting and stereo matching from multiple camera views, represents a valuable advancement in 3D modeling. By capturing depth uncertainty and fusing complementary visual cues, the technique can produce higher-fidelity 3D representations compared to traditional single-view approaches.
The innovations in this paper have the potential to benefit a wide range of applications, from virtual reality and robotics to 3D printing and beyond. As the researchers continue to refine and expand on this work, it could lead to even more accurate and reliable 3D reconstruction capabilities, with far-reaching implications for how we interact with and model the physical world.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Surface Reconstruction from Gaussian Splatting via Novel Stereo Views
Yaniv Wolf, Amit Bracha, Ron Kimmel
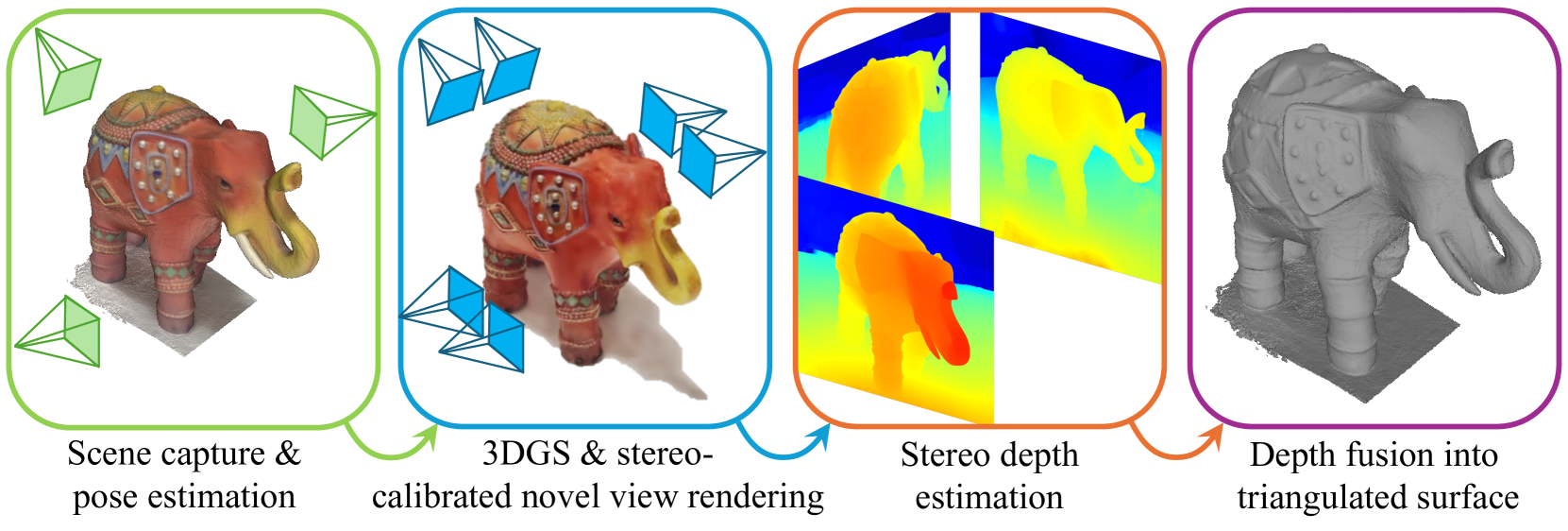
Recently, 3D Gaussian Splatting (3DGS) has emerged as an efficient approach for accurately representing scenes. However, despite its superior novel view synthesis capabilities, extracting the geometry of the scene directly from the Gaussian properties remains a challenge, as those are optimized based on a photometric loss. While some concurrent models have tried adding geometric constraints during the Gaussian optimization process, they still produce noisy, unrealistic surfaces. We propose a novel approach for bridging the gap between the noisy 3DGS representation and the smooth 3D mesh representation, by injecting real-world knowledge into the depth extraction process. Instead of extracting the geometry of the scene directly from the Gaussian properties, we instead extract the geometry through a pre-trained stereo-matching model. We render stereo-aligned pairs of images corresponding to the original training poses, feed the pairs into a stereo model to get a depth profile, and finally fuse all of the profiles together to get a single mesh. The resulting reconstruction is smoother, more accurate and shows more intricate details compared to other methods for surface reconstruction from Gaussian Splatting, while only requiring a small overhead on top of the fairly short 3DGS optimization process. We performed extensive testing of the proposed method on in-the-wild scenes, obtained using a smartphone, showcasing its superior reconstruction abilities. Additionally, we tested the method on the Tanks and Temples and DTU benchmarks, achieving state-of-the-art results.
Read more7/18/2024
📉
0
Gaussian Splatting: 3D Reconstruction and Novel View Synthesis, a Review
Anurag Dalal, Daniel Hagen, Kjell G. Robbersmyr, Kristian Muri Knausg{aa}rd
Image-based 3D reconstruction is a challenging task that involves inferring the 3D shape of an object or scene from a set of input images. Learning-based methods have gained attention for their ability to directly estimate 3D shapes. This review paper focuses on state-of-the-art techniques for 3D reconstruction, including the generation of novel, unseen views. An overview of recent developments in the Gaussian Splatting method is provided, covering input types, model structures, output representations, and training strategies. Unresolved challenges and future directions are also discussed. Given the rapid progress in this domain and the numerous opportunities for enhancing 3D reconstruction methods, a comprehensive examination of algorithms appears essential. Consequently, this study offers a thorough overview of the latest advancements in Gaussian Splatting.
Read more5/7/2024
0
2D Gaussian Splatting for Geometrically Accurate Radiance Fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, Shenghua Gao
3D Gaussian Splatting (3DGS) has recently revolutionized radiance field reconstruction, achieving high quality novel view synthesis and fast rendering speed without baking. However, 3DGS fails to accurately represent surfaces due to the multi-view inconsistent nature of 3D Gaussians. We present 2D Gaussian Splatting (2DGS), a novel approach to model and reconstruct geometrically accurate radiance fields from multi-view images. Our key idea is to collapse the 3D volume into a set of 2D oriented planar Gaussian disks. Unlike 3D Gaussians, 2D Gaussians provide view-consistent geometry while modeling surfaces intrinsically. To accurately recover thin surfaces and achieve stable optimization, we introduce a perspective-correct 2D splatting process utilizing ray-splat intersection and rasterization. Additionally, we incorporate depth distortion and normal consistency terms to further enhance the quality of the reconstructions. We demonstrate that our differentiable renderer allows for noise-free and detailed geometry reconstruction while maintaining competitive appearance quality, fast training speed, and real-time rendering.
Read more6/11/2024

0
PGSR: Planar-based Gaussian Splatting for Efficient and High-Fidelity Surface Reconstruction
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, Guofeng Zhang
Recently, 3D Gaussian Splatting (3DGS) has attracted widespread attention due to its high-quality rendering, and ultra-fast training and rendering speed. However, due to the unstructured and irregular nature of Gaussian point clouds, it is difficult to guarantee geometric reconstruction accuracy and multi-view consistency simply by relying on image reconstruction loss. Although many studies on surface reconstruction based on 3DGS have emerged recently, the quality of their meshes is generally unsatisfactory. To address this problem, we propose a fast planar-based Gaussian splatting reconstruction representation (PGSR) to achieve high-fidelity surface reconstruction while ensuring high-quality rendering. Specifically, we first introduce an unbiased depth rendering method, which directly renders the distance from the camera origin to the Gaussian plane and the corresponding normal map based on the Gaussian distribution of the point cloud, and divides the two to obtain the unbiased depth. We then introduce single-view geometric, multi-view photometric, and geometric regularization to preserve global geometric accuracy. We also propose a camera exposure compensation model to cope with scenes with large illumination variations. Experiments on indoor and outdoor scenes show that our method achieves fast training and rendering while maintaining high-fidelity rendering and geometric reconstruction, outperforming 3DGS-based and NeRF-based methods.
Read more6/11/2024