Gymnasium: A Standard Interface for Reinforcement Learning Environments

0
Sign in to get full access
Overview
- Gymnasium is a new standard interface for reinforcement learning (RL) environments.
- It aims to provide a unified and extensible system for developing, benchmarking, and deploying RL algorithms.
- The paper presents the design decisions and key features of Gymnasium, highlighting its benefits over existing RL frameworks.
Plain English Explanation
Gymnasium is a software tool that helps researchers and developers work on reinforcement learning (RL) - a type of machine learning where AI agents learn by interacting with an environment and receiving rewards or punishments for their actions.
The key idea behind Gymnasium is to provide a common, standardized way for RL researchers to create, test, and compare their AI algorithms across different environments. Existing RL frameworks can be quite complex and tailored to specific tasks, making it difficult to share and reuse code. Gymnasium aims to solve this by offering a flexible, extensible interface that works for a wide range of RL problems, from simple grid-world games to complex robotic control tasks.
By using Gymnasium, RL researchers can more easily benchmark their algorithms against common baselines, collaborate on developing new environments, and ultimately advance the state-of-the-art in reinforcement learning. This standardized approach helps accelerate progress in the field and makes it easier for newcomers to get started with RL.
Technical Explanation
The Gymnasium framework was designed with several key principles in mind:
-
Simplicity: Gymnasium provides a minimal, intuitive API that abstracts away many low-level details, allowing researchers to focus on the high-level logic of their RL agents.
-
Flexibility: The system is designed to be extensible, supporting a wide range of environment types (e.g. discrete, continuous, pixel-based) and enabling the creation of custom environments.
-
Portability: Gymnasium environments can be easily deployed on different hardware and software platforms, promoting reuse and reproducibility of RL research.
-
Efficiency: The framework is optimized for performance, allowing for efficient interaction between agents and environments, particularly for high-dimensional or continuous state/action spaces.
-
Standardization: Gymnasium defines a common set of API methods and conventions, facilitating the development of shared tools, benchmarks, and best practices in the RL community.
The paper provides a detailed technical overview of the Gymnasium API, including its core components (e.g. environments, agents, wrappers) and how they interact. It also discusses several advanced features, such as support for multi-agent environments and real-time rendering of environments.
Critical Analysis
The authors acknowledge that Gymnasium is not the first attempt to standardize RL environments, and they discuss how it builds upon and differentiates itself from previous frameworks like OpenAI Gym and DeepMind Control Suite.
One potential limitation mentioned is the challenge of ensuring compatibility and consistency across a diverse set of environments developed by the community. The authors propose mechanisms like environment validation and versioning to address this issue.
Another area for further research could be exploring ways to better integrate Gymnasium with other popular machine learning tools and libraries, to further streamline the RL development workflow.
Overall, the Gymnasium framework appears to be a well-designed and promising contribution to the field of reinforcement learning, with the potential to significantly improve the reproducibility, collaboration, and progress in this important area of AI research.
Conclusion
The Gymnasium paper presents a new standard interface for reinforcement learning environments that aims to address the fragmentation and complexity issues in the current RL ecosystem. By providing a simple, flexible, and efficient framework, Gymnasium has the potential to accelerate research and development in this field, enabling researchers to more easily benchmark, share, and build upon each other's work.
The standardization and extensibility of Gymnasium could also make RL more accessible to a wider range of users, from students and hobbyists to industry practitioners, ultimately driving broader adoption and innovation in this exciting area of artificial intelligence.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Gymnasium: A Standard Interface for Reinforcement Learning Environments
Mark Towers, Ariel Kwiatkowski, Jordan Terry, John U. Balis, Gianluca De Cola, Tristan Deleu, Manuel Goul~ao, Andreas Kallinteris, Markus Krimmel, Arjun KG, Rodrigo Perez-Vicente, Andrea Pierr'e, Sander Schulhoff, Jun Jet Tai, Hannah Tan, Omar G. Younis
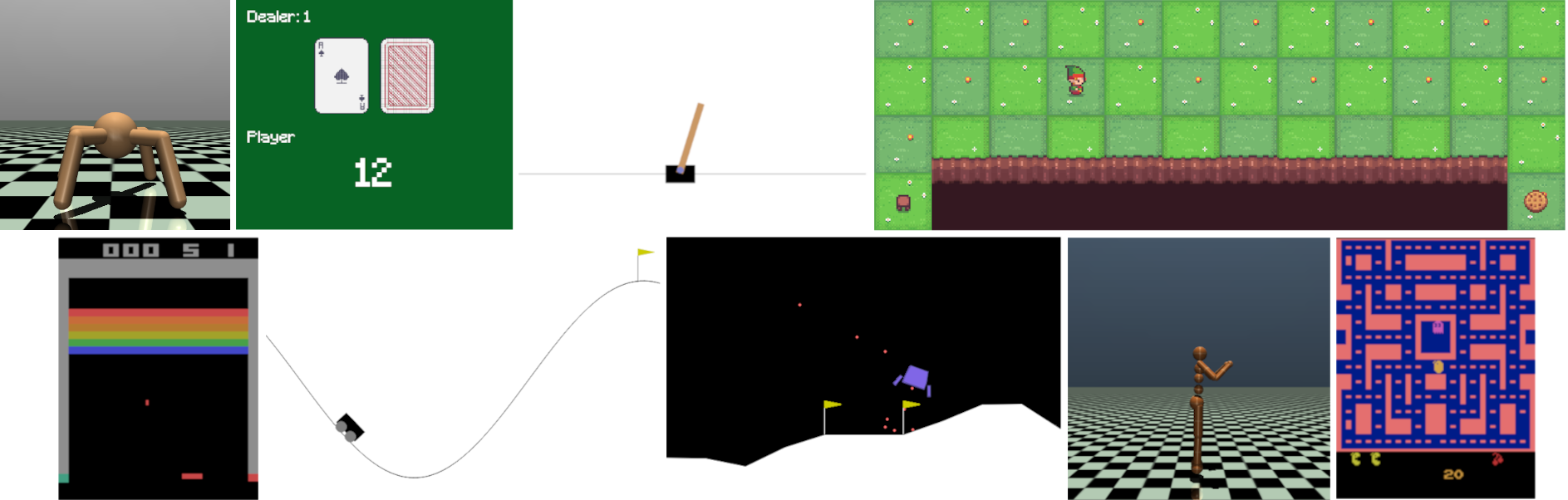
Gymnasium is an open-source library providing an API for reinforcement learning environments. Its main contribution is a central abstraction for wide interoperability between benchmark environments and training algorithms. Gymnasium comes with various built-in environments and utilities to simplify researchers' work along with being supported by most training libraries. This paper outlines the main design decisions for Gymnasium, its key features, and the differences to alternative APIs.
Read more7/25/2024
🏅
0
SDGym: Low-Code Reinforcement Learning Environments using System Dynamics Models
Emmanuel Klu, Sameer Sethi, DJ Passey, Donald Martin Jr
Understanding the long-term impact of algorithmic interventions on society is vital to achieving responsible AI. Traditional evaluation strategies often fall short due to the complex, adaptive and dynamic nature of society. While reinforcement learning (RL) can be a powerful approach for optimizing decisions in dynamic settings, the difficulty of realistic environment design remains a barrier to building robust agents that perform well in practical settings. To address this issue we tap into the field of system dynamics (SD) as a complementary method that incorporates collaborative simulation model specification practices. We introduce SDGym, a low-code library built on the OpenAI Gym framework which enables the generation of custom RL environments based on SD simulation models. Through a feasibility study we validate that well specified, rich RL environments can be generated from preexisting SD models and a few lines of configuration code. We demonstrate the capabilities of the SDGym environment using an SD model of the electric vehicle adoption problem. We compare two SD simulators, PySD and BPTK-Py for parity, and train a D4PG agent using the Acme framework to showcase learning and environment interaction. Our preliminary findings underscore the dual potential of SD to improve RL environment design and for RL to improve dynamic policy discovery within SD models. By open-sourcing SDGym, the intent is to galvanize further research and promote adoption across the SD and RL communities, thereby catalyzing collaboration in this emerging interdisciplinary space.
Read more8/26/2024

0
AgentGym: Evolving Large Language Model-based Agents across Diverse Environments
Zhiheng Xi, Yiwen Ding, Wenxiang Chen, Boyang Hong, Honglin Guo, Junzhe Wang, Dingwen Yang, Chenyang Liao, Xin Guo, Wei He, Songyang Gao, Lu Chen, Rui Zheng, Yicheng Zou, Tao Gui, Qi Zhang, Xipeng Qiu, Xuanjing Huang, Zuxuan Wu, Yu-Gang Jiang
Building generalist agents that can handle diverse tasks and evolve themselves across different environments is a long-term goal in the AI community. Large language models (LLMs) are considered a promising foundation to build such agents due to their generalized capabilities. Current approaches either have LLM-based agents imitate expert-provided trajectories step-by-step, requiring human supervision, which is hard to scale and limits environmental exploration; or they let agents explore and learn in isolated environments, resulting in specialist agents with limited generalization. In this paper, we take the first step towards building generally-capable LLM-based agents with self-evolution ability. We identify a trinity of ingredients: 1) diverse environments for agent exploration and learning, 2) a trajectory set to equip agents with basic capabilities and prior knowledge, and 3) an effective and scalable evolution method. We propose AgentGym, a new framework featuring a variety of environments and tasks for broad, real-time, uni-format, and concurrent agent exploration. AgentGym also includes a database with expanded instructions, a benchmark suite, and high-quality trajectories across environments. Next, we propose a novel method, AgentEvol, to investigate the potential of agent self-evolution beyond previously seen data across tasks and environments. Experimental results show that the evolved agents can achieve results comparable to SOTA models. We release the AgentGym suite, including the platform, dataset, benchmark, checkpoints, and algorithm implementations. The AgentGym suite is available on https://github.com/WooooDyy/AgentGym.
Read more6/7/2024

0
Humanoid-Gym: Reinforcement Learning for Humanoid Robot with Zero-Shot Sim2Real Transfer
Xinyang Gu, Yen-Jen Wang, Jianyu Chen
Humanoid-Gym is an easy-to-use reinforcement learning (RL) framework based on Nvidia Isaac Gym, designed to train locomotion skills for humanoid robots, emphasizing zero-shot transfer from simulation to the real-world environment. Humanoid-Gym also integrates a sim-to-sim framework from Isaac Gym to Mujoco that allows users to verify the trained policies in different physical simulations to ensure the robustness and generalization of the policies. This framework is verified by RobotEra's XBot-S (1.2-meter tall humanoid robot) and XBot-L (1.65-meter tall humanoid robot) in a real-world environment with zero-shot sim-to-real transfer. The project website and source code can be found at: https://sites.google.com/view/humanoid-gym/.
Read more5/21/2024