Hand-Object Interaction Controller (HOIC): Deep Reinforcement Learning for Reconstructing Interactions with Physics

0
Sign in to get full access
Overview
- The paper presents a deep reinforcement learning approach called the Hand-Object Interaction Controller (HOIC) for reconstructing physically realistic hand-object interactions from a single depth camera.
- HOIC aims to generate physically plausible hand-object interactions by learning a control policy from simulated data.
- The system is designed to work with a wide range of objects and can handle complex hand-object manipulation tasks.
Plain English Explanation
The researchers developed a new system called the Hand-Object Interaction Controller (HOIC) that can accurately simulate how a person's hand interacts with objects in the real world. This is done using a deep reinforcement learning approach, which means the system learns how to control the hand's movements by trial and error in a virtual environment.
The key idea is to train the system on simulated data of hands interacting with various objects. By observing these simulated interactions and learning from them, the HOIC system can then generate new, physically realistic hand-object interactions, even for objects and tasks it hasn't seen before. [See related work on behavior imitation for manipulator control and grasping, text-guided 3D motion generation for hands, and disentangled pre-training for human-object interaction detection.]
The system takes input from a single depth camera, which provides information about the 3D position and orientation of the hand. It then uses this input to control a simulated hand model and interact with virtual objects in a physically realistic way. This allows the HOIC system to reconstruct how a real hand would manipulate an object, even if the object is new or the task is complex.
The key advantage of this approach is that it can handle a wide variety of objects and tasks, without requiring explicit programming or modeling of each one. By learning from simulated data, the HOIC system can generalize to new situations and seamlessly blend different hand-object interactions.
Technical Explanation
The HOIC system uses a deep reinforcement learning approach to learn a control policy for physically realistic hand-object interactions. The input to the system is a single depth camera, which provides information about the 3D position and orientation of the hand.
The system consists of three main components:
- A hand model that simulates the kinematics and dynamics of a human hand.
- A physics engine that simulates the interaction between the hand and virtual objects.
- A deep neural network that acts as the control policy, mapping the hand's state to the appropriate actions to take.
During training, the system is placed in a virtual environment with various objects. The hand model interacts with these objects, and the neural network learns a control policy that maximizes a reward function based on the physical realism of the interactions. [See related work on local geometry-aware hand-object interaction and human-object interaction anticipation.]
The key insight of the HOIC system is that by learning from simulated data, it can generalize to handle a wide range of objects and tasks, without requiring explicit modeling or programming of each one. The neural network can blend different hand-object interactions and seamlessly adapt to new situations.
Critical Analysis
The HOIC system presents an interesting and promising approach to reconstructing physically realistic hand-object interactions from a single depth camera. However, the paper does not extensively address the limitations and potential issues with the system.
One potential concern is the dependence on simulated data for training the neural network. While the authors claim the system can generalize to new objects and tasks, it is unclear how well the simulated interactions translate to the real world, where there may be additional complexities and uncertainties.
Additionally, the paper does not provide a thorough evaluation of the system's performance in real-world settings. The experiments are primarily conducted in simulation, and the authors do not discuss the challenges and limitations that may arise when deploying the system in a practical application.
Further research could explore ways to improve the system's robustness and reliability, such as incorporating real-world data or developing techniques to better bridge the gap between simulation and reality. [See related work on text-guided 3D motion generation for hands and disentangled pre-training for human-object interaction detection.]
Conclusion
The Hand-Object Interaction Controller (HOIC) presents a novel deep reinforcement learning approach for reconstructing physically realistic hand-object interactions from a single depth camera. By learning a control policy from simulated data, the system can handle a wide range of objects and tasks, blending different hand-object interactions seamlessly.
While the technical approach is promising, the paper does not fully address the limitations and potential challenges of the system, particularly in real-world deployment. Further research is needed to improve the system's robustness and reliability, as well as to better understand its performance in practical applications.
Overall, the HOIC system represents an interesting step forward in the field of hand-object interaction modeling, and its ability to generalize to new situations could have important implications for various applications, such as robotics, virtual reality, and human-computer interaction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hand-Object Interaction Controller (HOIC): Deep Reinforcement Learning for Reconstructing Interactions with Physics
Haoyu Hu, Xinyu Yi, Zhe Cao, Jun-Hai Yong, Feng Xu
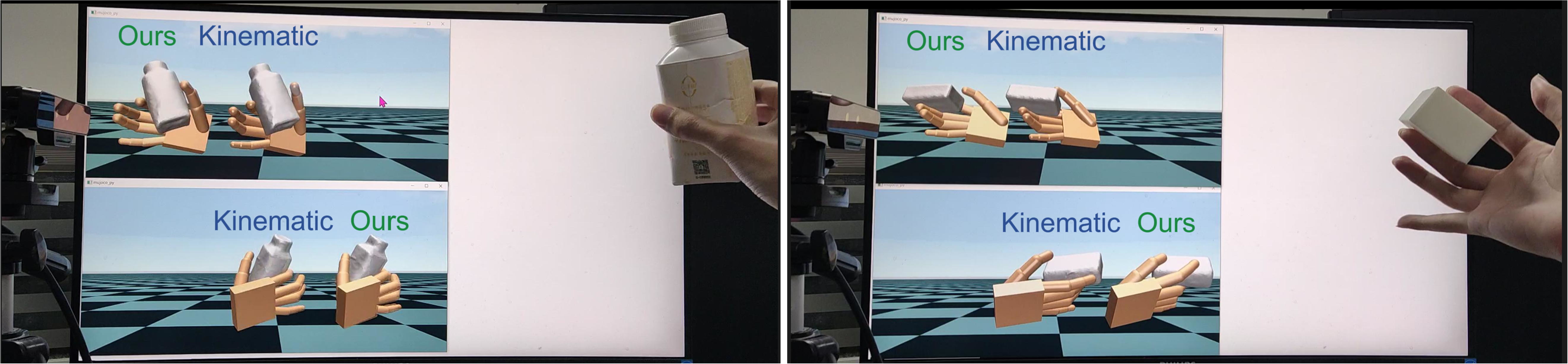
Hand manipulating objects is an important interaction motion in our daily activities. We faithfully reconstruct this motion with a single RGBD camera by a novel deep reinforcement learning method to leverage physics. Firstly, we propose object compensation control which establishes direct object control to make the network training more stable. Meanwhile, by leveraging the compensation force and torque, we seamlessly upgrade the simple point contact model to a more physical-plausible surface contact model, further improving the reconstruction accuracy and physical correctness. Experiments indicate that without involving any heuristic physical rules, this work still successfully involves physics in the reconstruction of hand-object interactions which are complex motions hard to imitate with deep reinforcement learning. Our code and data are available at https://github.com/hu-hy17/HOIC.
Read more5/7/2024

0
Real-Time Dynamic Robot-Assisted Hand-Object Interaction via Motion Primitives
Mingqi Yuan, Huijiang Wang, Kai-Fung Chu, Fumiya Iida, Bo Li, Wenjun Zeng
Advances in artificial intelligence (AI) have been propelling the evolution of human-robot interaction (HRI) technologies. However, significant challenges remain in achieving seamless interactions, particularly in tasks requiring physical contact with humans. These challenges arise from the need for accurate real-time perception of human actions, adaptive control algorithms for robots, and the effective coordination between human and robotic movements. In this paper, we propose an approach to enhancing physical HRI with a focus on dynamic robot-assisted hand-object interaction (HOI). Our methodology integrates hand pose estimation, adaptive robot control, and motion primitives to facilitate human-robot collaboration. Specifically, we employ a transformer-based algorithm to perform real-time 3D modeling of human hands from single RGB images, based on which a motion primitives model (MPM) is designed to translate human hand motions into robotic actions. The robot's action implementation is dynamically fine-tuned using the continuously updated 3D hand models. Experimental validations, including a ring-wearing task, demonstrate the system's effectiveness in adapting to real-time movements and assisting in precise task executions.
Read more5/31/2024

0
Kinematics-based 3D Human-Object Interaction Reconstruction from Single View
Yuhang Chen, Chenxing Wang
Reconstructing 3D human-object interaction (HOI) from single-view RGB images is challenging due to the absence of depth information and potential occlusions. Existing methods simply predict the body poses merely rely on network training on some indoor datasets, which cannot guarantee the rationality of the results if some body parts are invisible due to occlusions that appear easily. Inspired by the end-effector localization task in robotics, we propose a kinematics-based method that can drive the joints of human body to the human-object contact regions accurately. After an improved forward kinematics algorithm is proposed, the Multi-Layer Perceptron is introduced into the solution of inverse kinematics process to determine the poses of joints, which achieves precise results than the commonly-used numerical methods in robotics. Besides, a Contact Region Recognition Network (CRRNet) is also proposed to robustly determine the contact regions using a single-view video. Experimental results demonstrate that our method outperforms the state-of-the-art on benchmark BEHAVE. Additionally, our approach shows good portability and can be seamlessly integrated into other methods for optimizations.
Read more7/22/2024

0
Hand-Object Interaction Pretraining from Videos
Himanshu Gaurav Singh, Antonio Loquercio, Carmelo Sferrazza, Jane Wu, Haozhi Qi, Pieter Abbeel, Jitendra Malik
We present an approach to learn general robot manipulation priors from 3D hand-object interaction trajectories. We build a framework to use in-the-wild videos to generate sensorimotor robot trajectories. We do so by lifting both the human hand and the manipulated object in a shared 3D space and retargeting human motions to robot actions. Generative modeling on this data gives us a task-agnostic base policy. This policy captures a general yet flexible manipulation prior. We empirically demonstrate that finetuning this policy, with both reinforcement learning (RL) and behavior cloning (BC), enables sample-efficient adaptation to downstream tasks and simultaneously improves robustness and generalizability compared to prior approaches. Qualitative experiments are available at: url{https://hgaurav2k.github.io/hop/}.
Read more9/14/2024