Hardware-Accelerated Ray Tracing for Discrete and Continuous Collision Detection on GPUs

0
Sign in to get full access
Overview
- This paper presents a hardware-accelerated ray tracing approach for both discrete and continuous collision detection on GPUs.
- The proposed technique leverages the parallel processing capabilities of GPUs to efficiently perform ray tracing-based collision detection.
- The method is applicable to a wide range of applications, including robotics, computer animation, and virtual reality.
Plain English Explanation
Hardware-Accelerated Ray Tracing for Discrete and Continuous Collision Detection on GPUs describes a new way to detect collisions between objects in 3D computer graphics and simulations. The key idea is to use the powerful graphics processing units (GPUs) found in most modern computers to perform a technique called "ray tracing" extremely quickly.
Ray tracing is a method for simulating the movement of light by tracking the paths, or "rays," of light as they bounce around a 3D scene. The researchers realized that this same ray tracing process could be used to detect when objects collide with each other. By firing rays out from one object and seeing which other objects the rays intersect, they can determine if and when a collision occurs.
Traditionally, collision detection has been a computationally expensive task, but by leveraging the massively parallel processing power of GPUs, the researchers were able to make the ray tracing-based collision detection much faster. This allows for more realistic and responsive simulations, which is important for applications like robotics, computer animation, and virtual reality.
The key innovation in this paper is the specific techniques the researchers developed to efficiently implement this GPU-accelerated ray tracing approach. They describe novel algorithms and data structures that allow the collision detection to be performed quickly and accurately on the GPU hardware.
Technical Explanation
Hardware-Accelerated Ray Tracing for Discrete and Continuous Collision Detection on GPUs presents a novel technique for utilizing the parallel processing capabilities of GPUs to perform ray tracing-based collision detection.
The approach first constructs a bounding volume hierarchy (BVH) data structure to represent the 3D scene. This BVH allows for efficient ray-object intersection tests. The researchers then developed a GPU-based ray tracing algorithm that leverages the massively parallel architecture of modern GPUs to concurrently trace rays and perform collision checks.
For discrete collision detection, the method fires rays from one object and checks for intersections with other objects in the scene. This allows for rapid identification of colliding object pairs.
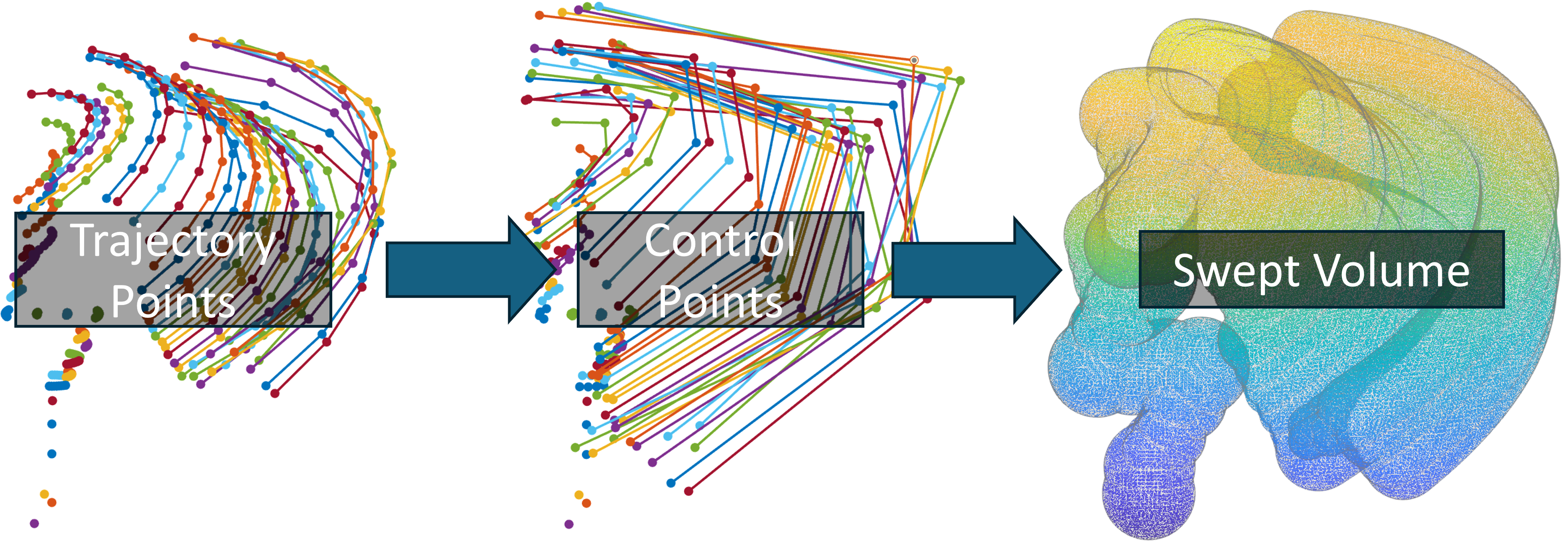
To handle continuous collision detection, the researchers extended their ray tracing approach to consider the full motion of objects over time. By tracing rays along the trajectory of moving objects, they can detect collisions that occur between discrete time steps.
The paper provides a detailed description of the parallel algorithms and data structures used to implement this GPU-accelerated ray tracing pipeline. The authors also present extensive experimental results demonstrating the significant performance improvements of their method compared to prior CPU-based collision detection techniques.
Critical Analysis
The hardware-accelerated ray tracing approach represents an important advance in collision detection capabilities, particularly for applications that require real-time performance or support for continuous motion.
One key limitation mentioned in the paper is that the method assumes rigid body motion. It may be challenging to extend the technique to handle more complex deformable or articulated objects. Additionally, the paper does not explore the memory and bandwidth requirements of the GPU-based ray tracing, which could be a limiting factor for very large or complex scenes.
The authors also note that their current implementation targets discrete collision detection, and further work is needed to fully optimize the continuous collision detection aspect of the approach. Exploring techniques to reduce the computational overhead of tracing rays along object trajectories would be a valuable area for future research.
Overall, this work demonstrates the significant potential of leveraging GPU hardware acceleration for improving the performance of core 3D simulation and modeling tasks like collision detection. As GPUs continue to become more powerful and ubiquitous, techniques like the one presented in this paper will likely play an increasingly important role in enabling more realistic and responsive virtual environments.
Conclusion
Hardware-Accelerated Ray Tracing for Discrete and Continuous Collision Detection on GPUs presents a novel GPU-based approach for performing efficient ray tracing-based collision detection. By exploiting the parallel processing capabilities of modern GPUs, the researchers were able to significantly improve the performance of both discrete and continuous collision detection compared to traditional CPU-based methods.
This work has important implications for a wide range of applications, from robotics and computer animation to virtual reality and gaming. By enabling faster and more accurate collision detection, the proposed techniques can lead to more responsive and realistic simulations, which is crucial for creating convincing virtual environments.
While the current method has some limitations, such as the focus on rigid body motion, the authors have laid the groundwork for further advancements in this area. As GPU hardware and algorithms continue to evolve, we can expect to see even more powerful and versatile collision detection systems that leverage the power of hardware acceleration.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Hardware-Accelerated Ray Tracing for Discrete and Continuous Collision Detection on GPUs
Sizhe Sui, Luis Sentis, Andrew Bylard
This paper presents a set of simple and intuitive robot collision detection algorithms that show substantial scaling improvements for high geometric complexity and large numbers of collision queries by leveraging hardware-accelerated ray tracing on GPUs. It is the first leveraging hardware-accelerated ray-tracing for direct volume mesh-to-mesh discrete collision detection and applying it to continuous collision detection. We introduce two methods: Ray-Traced Discrete-Pose Collision Detection for exact robot mesh to obstacle mesh collision detection, and Ray-Traced Continuous Collision Detection for robot sphere representation to obstacle mesh swept collision detection, using piecewise-linear or quadratic B-splines. For robot link meshes totaling 24k triangles and obstacle meshes of over 190k triangles, our methods were up to 3 times faster in batched discrete-pose queries than a state-of-the-art GPU-based method using a sphere robot representation. For the same obstacle mesh scene, our sphere-robot continuous collision detection was up to 9 times faster depending on trajectory batch size. We also performed a detailed measurement of the volume coverage accuracy of various sphere/mesh pose/path representations to provide insight into the tradeoffs between speed and accuracy of different robot collision detection methods.
Read more9/17/2024
0
GPU-Accelerated Optimization-Based Collision Avoidance
Zeming Wu, Zhuping Wang, Hao Zhang
This paper proposes a GPU-accelerated optimization framework for collision avoidance problems where the controlled objects and the obstacles can be modeled as the finite union of convex polyhedra. A novel collision avoidance constraint is proposed based on scale-based collision detection and the strong duality of convex optimization. Under this constraint, the high-dimensional non-convex optimization problems of collision avoidance can be decomposed into several low-dimensional quadratic programmings (QPs) following the paradigm of alternating direction method of multipliers (ADMM). Furthermore, these low-dimensional QPs can be solved parallel with GPUs, significantly reducing computational time. High-fidelity simulations are conducted to validate the proposed method's effectiveness and practicality.
Read more6/12/2024

0
3D Gaussian Ray Tracing: Fast Tracing of Particle Scenes
Nicolas Moenne-Loccoz, Ashkan Mirzaei, Or Perel, Riccardo de Lutio, Janick Martinez Esturo, Gavriel State, Sanja Fidler, Nicholas Sharp, Zan Gojcic
Particle-based representations of radiance fields such as 3D Gaussian Splatting have found great success for reconstructing and re-rendering of complex scenes. Most existing methods render particles via rasterization, projecting them to screen space tiles for processing in a sorted order. This work instead considers ray tracing the particles, building a bounding volume hierarchy and casting a ray for each pixel using high-performance GPU ray tracing hardware. To efficiently handle large numbers of semi-transparent particles, we describe a specialized rendering algorithm which encapsulates particles with bounding meshes to leverage fast ray-triangle intersections, and shades batches of intersections in depth-order. The benefits of ray tracing are well-known in computer graphics: processing incoherent rays for secondary lighting effects such as shadows and reflections, rendering from highly-distorted cameras common in robotics, stochastically sampling rays, and more. With our renderer, this flexibility comes at little cost compared to rasterization. Experiments demonstrate the speed and accuracy of our approach, as well as several applications in computer graphics and vision. We further propose related improvements to the basic Gaussian representation, including a simple use of generalized kernel functions which significantly reduces particle hit counts.
Read more7/11/2024
🛸
0
Implicit Swept Volume SDF: Enabling Continuous Collision-Free Trajectory Generation for Arbitrary Shapes
Jingping Wang, Tingrui Zhang, Qixuan Zhang, Chuxiao Zeng, Jingyi Yu, Chao Xu, Lan Xu, Fei Gao
In the field of trajectory generation for objects, ensuring continuous collision-free motion remains a huge challenge, especially for non-convex geometries and complex environments. Previous methods either oversimplify object shapes, which results in a sacrifice of feasible space or rely on discrete sampling, which suffers from the tunnel effect. To address these limitations, we propose a novel hierarchical trajectory generation pipeline, which utilizes the Swept Volume Signed Distance Field (SVSDF) to guide trajectory optimization for Continuous Collision Avoidance (CCA). Our interdisciplinary approach, blending techniques from graphics and robotics, exhibits outstanding effectiveness in solving this problem. We formulate the computation of the SVSDF as a Generalized Semi-Infinite Programming model, and we solve for the numerical solutions at query points implicitly, thereby eliminating the need for explicit reconstruction of the surface. Our algorithm has been validated in a variety of complex scenarios and applies to robots of various dynamics, including both rigid and deformable shapes. It demonstrates exceptional universality and superior CCA performance compared to typical algorithms. The code will be released at https://github.com/ZJU-FAST-Lab/Implicit-SVSDF-Planner for the benefit of the community.
Read more5/2/2024