HarmonicNeRF: Geometry-Informed Synthetic View Augmentation for 3D Scene Reconstruction in Driving Scenarios

0

Sign in to get full access
Overview
- Presents a method for improving neural surface reconstruction from sparse camera views
- Leverages geometric cues to augment the input views, enabling better reconstruction of fine details
- Outperforms state-of-the-art approaches on benchmark datasets
Plain English Explanation
This research paper introduces a novel technique for enhancing neural surface reconstruction from limited camera views. The key insight is to leverage geometric information to intelligently supplement the sparse input views, enabling the neural network to better reconstruct fine details and intricate surface geometry.
The method works by analyzing the available camera views and generating additional "augmented" rays that capture important geometric cues. This patch-based approach allows the neural network to learn from a richer set of observations, leading to more accurate 3D reconstructions even when the initial camera coverage is sparse.
The authors demonstrate that their geometry-guided ray augmentation technique outperforms state-of-the-art methods on standard benchmark datasets, highlighting its potential for applications in 3D scanning, autonomous navigation, and other domains that rely on accurate 3D scene reconstruction from limited visual data.
Technical Explanation
The paper presents a novel approach for improving neural surface reconstruction from sparse multi-view images. The key idea is to leverage geometric cues in the available views to intelligently augment the input with additional rays, enabling the neural network to learn a richer representation of the 3D scene.
The authors first analyze the camera views to identify important geometric features, such as edges, corners, and surface discontinuities. They then generate additional "augmented" rays that capture these salient geometric properties, effectively expanding the input to the neural network.
The neural reconstruction model is trained on this augmented set of rays, which allows it to better learn the underlying surface geometry, even in regions where the initial camera coverage is sparse. The authors demonstrate that this geometry-guided ray augmentation technique outperforms state-of-the-art multi-view reconstruction methods on standard benchmarks.
Critical Analysis
The proposed method offers a compelling approach to improving neural surface reconstruction from limited camera views. By leveraging geometric cues to augment the input, the technique is able to capture important details that would otherwise be missed by the neural network.
However, the paper does not address the computational overhead associated with the ray augmentation process. Generating and processing the additional rays may increase the overall computational complexity of the system, which could be a concern for real-time or resource-constrained applications.
Additionally, the authors only evaluate their method on synthetic benchmark datasets, which may not fully capture the challenges of real-world 3D reconstruction scenarios. Further testing on more diverse and realistic datasets would help to validate the method's effectiveness in practical settings.
Finally, the paper does not explore the potential limitations of the geometry-guided augmentation approach. It would be valuable to understand the scenarios where the technique may struggle, such as highly complex or occluded environments, and how these limitations could be addressed in future work.
Conclusion
This research presents a promising approach to improving neural surface reconstruction from sparse multi-view images. By leveraging geometric cues to intelligently augment the input, the technique enables neural networks to better capture intricate surface details, even in regions with limited camera coverage.
The demonstrated performance improvements on benchmark datasets suggest that this geometry-guided ray augmentation method has the potential to significantly advance the state of the art in 3D reconstruction, with applications in areas such as autonomous navigation, virtual reality, and digital heritage preservation.
As the field of neural 3D reconstruction continues to evolve, techniques like the one presented in this paper will play an increasingly important role in enabling more accurate and robust 3D scene understanding from limited visual data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
HarmonicNeRF: Geometry-Informed Synthetic View Augmentation for 3D Scene Reconstruction in Driving Scenarios
Xiaochao Pan, Jiawei Yao, Hongrui Kou, Tong Wu, Canran Xiao
In the realm of autonomous driving, achieving precise 3D reconstruction of the driving environment is critical for ensuring safety and effective navigation. Neural Radiance Fields (NeRF) have shown promise in creating highly detailed and accurate models of complex environments. However, the application of NeRF in autonomous driving scenarios encounters several challenges, primarily due to the sparsity of viewpoints inherent in camera trajectories and the constraints on data collection in unbounded outdoor scenes, which typically occur along predetermined paths. This limitation not only reduces the available scene information but also poses significant challenges for NeRF training, as the sparse and path-distributed observational data leads to under-representation of the scene's geometry. In this paper, we introduce HarmonicNeRF, a novel approach for outdoor self-supervised monocular scene reconstruction. HarmonicNeRF capitalizes on the strengths of NeRF and enhances surface reconstruction accuracy by augmenting the input space with geometry-informed synthetic views. This is achieved through the application of spherical harmonics to generate novel radiance values, taking into careful consideration the color observations from the limited available real-world views. Additionally, our method incorporates proxy geometry to effectively manage occlusion, generating radiance pseudo-labels that circumvent the limitations of traditional image-warping techniques, which often fail in sparse data conditions typical of autonomous driving environments. Extensive experiments conducted on the KITTI, Argoverse, and NuScenes datasets demonstrate our approach establishes new benchmarks in synthesizing novel depth views and reconstructing scenes, significantly outperforming existing methods. Project page: https://github.com/Jiawei-Yao0812/HarmonicNeRF
Read more7/26/2024
🧠
0
3D Reconstruction and New View Synthesis of Indoor Environments based on a Dual Neural Radiance Field
Zhenyu Bao, Guibiao Liao, Zhongyuan Zhao, Kanglin Liu, Qing Li, Guoping Qiu
Simultaneously achieving 3D reconstruction and new view synthesis for indoor environments has widespread applications but is technically very challenging. State-of-the-art methods based on implicit neural functions can achieve excellent 3D reconstruction results, but their performances on new view synthesis can be unsatisfactory. The exciting development of neural radiance field (NeRF) has revolutionized new view synthesis, however, NeRF-based models can fail to reconstruct clean geometric surfaces. We have developed a dual neural radiance field (Du-NeRF) to simultaneously achieve high-quality geometry reconstruction and view rendering. Du-NeRF contains two geometric fields, one derived from the SDF field to facilitate geometric reconstruction and the other derived from the density field to boost new view synthesis. One of the innovative features of Du-NeRF is that it decouples a view-independent component from the density field and uses it as a label to supervise the learning process of the SDF field. This reduces shape-radiance ambiguity and enables geometry and color to benefit from each other during the learning process. Extensive experiments demonstrate that Du-NeRF can significantly improve the performance of novel view synthesis and 3D reconstruction for indoor environments and it is particularly effective in constructing areas containing fine geometries that do not obey multi-view color consistency.
Read more7/22/2024
🧠
0
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
Read more7/29/2024
0
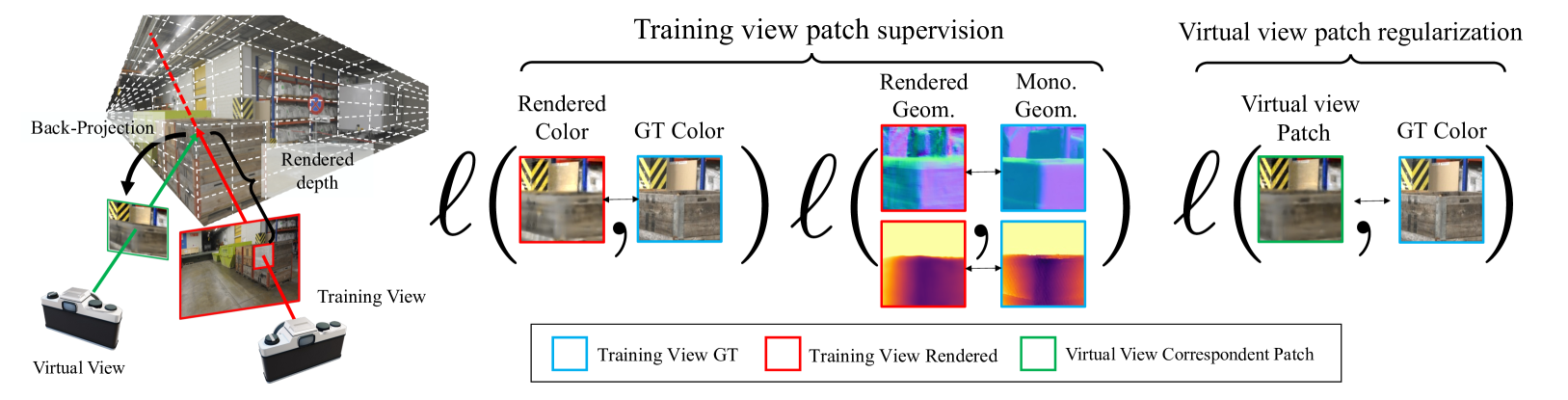
MonoPatchNeRF: Improving Neural Radiance Fields with Patch-based Monocular Guidance
Yuqun Wu, Jae Yong Lee, Chuhang Zou, Shenlong Wang, Derek Hoiem
The latest regularized Neural Radiance Field (NeRF) approaches produce poor geometry and view extrapolation for large scale sparse view scenes, such as ETH3D. Density-based approaches tend to be under-constrained, while surface-based approaches tend to miss details. In this paper, we take a density-based approach, sampling patches instead of individual rays to better incorporate monocular depth and normal estimates and patch-based photometric consistency constraints between training views and sampled virtual views. Loosely constraining densities based on estimated depth aligned to sparse points further improves geometric accuracy. While maintaining similar view synthesis quality, our approach significantly improves geometric accuracy on the ETH3D benchmark, e.g. increasing the F1@2cm score by 4x-8x compared to other regularized density-based approaches, with much lower training and inference time than other approaches.
Read more8/23/2024