Harnessing the Power of Neural Operators with Automatically Encoded Conservation Laws

0

Sign in to get full access
Overview
- This paper introduces a novel neural operator called ClawNO (Conservation Law Encoded Neural Operator) that can automatically encode conservation laws into neural networks to improve their performance on physical and scientific problems.
- The key idea is to incorporate physical constraints, such as conservation of mass or energy, directly into the neural network architecture, rather than relying on the network to learn these properties from data alone.
- This approach aims to improve the accuracy, generalization, and interpretability of neural operators for solving partial differential equations (PDEs) and other physical problems.
Plain English Explanation
The paper presents a new type of neural network called ClawNO that is designed to work well with physical and scientific problems. In many physical systems, there are fundamental laws or constraints, like conservation of mass or energy, that must be obeyed. The key insight of this work is to build these laws directly into the neural network architecture, rather than just trying to learn them from data.
The advantage of this approach is that it can lead to more accurate, generalizable, and interpretable neural networks for tasks like solving partial differential equations or modeling complex dynamical systems. By encoding the relevant conservation laws, the network can focus on learning the most important aspects of the problem, rather than having to rediscover these basic principles from scratch.
This is similar to how graph neural networks can incorporate physical constraints and symmetries into their architecture. The key difference here is the automatic encoding of conservation laws, which can be applied to a wider range of physical problems beyond just those that can be naturally expressed as graphs.
Overall, this work aims to advance the state-of-the-art in neural operators and their application to scientific and physical problems, by leveraging the power of Hamiltonian and Koopman operators to encode conservation laws into the neural network structure.
Technical Explanation
The core innovation of this paper is the introduction of the Conservation Law Encoded Neural Operator (ClawNO) framework. The key idea is to incorporate physical constraints, such as conservation of mass or energy, directly into the neural network architecture, rather than relying on the network to learn these properties from data alone.
The authors achieve this by leveraging a Hamiltonian formulation of the underlying partial differential equation (PDE) or physical system. They show how the Hamiltonian function can be used to derive a set of conservation laws that are then used to constrain the neural network structure. Specifically, they construct the neural network layers in a way that guarantees the satisfaction of these conservation laws during training and inference.
This approach has several advantages over traditional neural operators. First, it can lead to improved accuracy and generalization, as the network does not have to "rediscover" the fundamental physical constraints from scratch. Second, it enhances the interpretability of the model, as the conservation laws provide a clear physical interpretation of the network's internal representations and outputs.
The authors demonstrate the effectiveness of ClawNO on a range of benchmark PDE and physical simulation problems, including fluid dynamics and wave propagation. They show that ClawNO outperforms standard neural operators in terms of both accuracy and computational efficiency, particularly in cases where the underlying physics is well-characterized by the conservation laws.
Critical Analysis
One potential limitation of the ClawNO framework is that it relies on the availability of a Hamiltonian formulation of the underlying physical system. While this is possible for many classical PDEs and physical problems, it may not be straightforward to derive the Hamiltonian for more complex or less well-understood systems.
Additionally, the authors note that the conservation law encoding process can introduce additional computational overhead, as the network architecture becomes more complex. This may be a concern for large-scale or real-time applications where computational efficiency is critical.
It would also be interesting to see how ClawNO performs on problems where the underlying physics is not well-characterized or where there are multiple competing conservation laws that need to be balanced. In such cases, the automatic encoding of conservation laws may not be sufficient, and the network may need to learn more flexible representations to capture the relevant physical phenomena.
Overall, the ClawNO framework represents a promising step towards more physically-informed and interpretable neural operators. However, as with any new technique, further research and real-world testing will be needed to fully understand its strengths, limitations, and potential areas of application.
Conclusion
The Conservation Law Encoded Neural Operator (ClawNO) introduced in this paper is a novel approach to incorporating physical constraints into neural networks for solving partial differential equations and modeling complex physical systems. By automatically encoding conservation laws into the network architecture, ClawNO aims to improve the accuracy, generalization, and interpretability of neural operators.
The key innovation is the use of a Hamiltonian formulation to derive the relevant conservation laws, which are then used to constrain the structure of the neural network. This approach has been shown to outperform standard neural operators on a range of benchmark problems, particularly in cases where the underlying physics is well-characterized by the conservation laws.
While the ClawNO framework has some limitations, such as the need for a Hamiltonian formulation and potential computational overhead, it represents an important step towards more physically-informed and interpretable neural networks. As the field of scientific machine learning continues to evolve, techniques like ClawNO may prove increasingly valuable for tackling complex physical and scientific problems across a variety of domains.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Harnessing the Power of Neural Operators with Automatically Encoded Conservation Laws
Ning Liu, Yiming Fan, Xianyi Zeng, Milan Klower, Lu Zhang, Yue Yu
Neural operators (NOs) have emerged as effective tools for modeling complex physical systems in scientific machine learning. In NOs, a central characteristic is to learn the governing physical laws directly from data. In contrast to other machine learning applications, partial knowledge is often known a priori about the physical system at hand whereby quantities such as mass, energy and momentum are exactly conserved. Currently, NOs have to learn these conservation laws from data and can only approximately satisfy them due to finite training data and random noise. In this work, we introduce conservation law-encoded neural operators (clawNOs), a suite of NOs that endow inference with automatic satisfaction of such conservation laws. ClawNOs are built with a divergence-free prediction of the solution field, with which the continuity equation is automatically guaranteed. As a consequence, clawNOs are compliant with the most fundamental and ubiquitous conservation laws essential for correct physical consistency. As demonstrations, we consider a wide variety of scientific applications ranging from constitutive modeling of material deformation, incompressible fluid dynamics, to atmospheric simulation. ClawNOs significantly outperform the state-of-the-art NOs in learning efficacy, especially in small-data regimes.
Read more6/6/2024
0
Learning Hamiltonian neural Koopman operator and simultaneously sustaining and discovering conservation law
Jingdong Zhang, Qunxi Zhu, Wei Lin
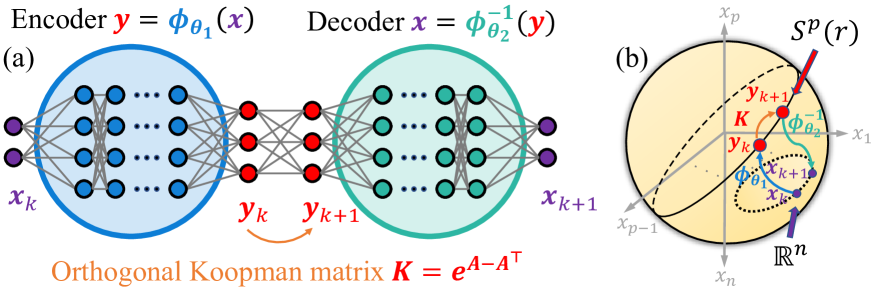
Accurately finding and predicting dynamics based on the observational data with noise perturbations is of paramount significance but still a major challenge presently. Here, for the Hamiltonian mechanics, we propose the Hamiltonian Neural Koopman Operator (HNKO), integrating the knowledge of mathematical physics in learning the Koopman operator, and making it automatically sustain and even discover the conservation laws. We demonstrate the outperformance of the HNKO and its extension using a number of representative physical systems even with hundreds or thousands of freedoms. Our results suggest that feeding the prior knowledge of the underlying system and the mathematical theory appropriately to the learning framework can reinforce the capability of machine learning in solving physical problems.
Read more6/5/2024

0
Approximating Numerical Fluxes Using Fourier Neural Operators for Hyperbolic Conservation Laws
Taeyoung Kim, Myungjoo Kang
Traditionally, classical numerical schemes have been employed to solve partial differential equations (PDEs) using computational methods. Recently, neural network-based methods have emerged. Despite these advancements, neural network-based methods, such as physics-informed neural networks (PINNs) and neural operators, exhibit deficiencies in robustness and generalization. To address these issues, numerous studies have integrated classical numerical frameworks with machine learning techniques, incorporating neural networks into parts of traditional numerical methods. In this study, we focus on hyperbolic conservation laws by replacing traditional numerical fluxes with neural operators. To this end, we developed loss functions inspired by established numerical schemes related to conservation laws and approximated numerical fluxes using Fourier neural operators (FNOs). Our experiments demonstrated that our approach combines the strengths of both traditional numerical schemes and FNOs, outperforming standard FNO methods in several respects. For instance, we demonstrate that our method is robust, has resolution invariance, and is feasible as a data-driven method. In particular, our method can make continuous predictions over time and exhibits superior generalization capabilities with out-of-distribution (OOD) samples, which are challenges that existing neural operator methods encounter.
Read more5/14/2024

0
Using Uncertainty Quantification to Characterize and Improve Out-of-Domain Learning for PDEs
S. Chandra Mouli, Danielle C. Maddix, Shima Alizadeh, Gaurav Gupta, Andrew Stuart, Michael W. Mahoney, Yuyang Wang
Existing work in scientific machine learning (SciML) has shown that data-driven learning of solution operators can provide a fast approximate alternative to classical numerical partial differential equation (PDE) solvers. Of these, Neural Operators (NOs) have emerged as particularly promising. We observe that several uncertainty quantification (UQ) methods for NOs fail for test inputs that are even moderately out-of-domain (OOD), even when the model approximates the solution well for in-domain tasks. To address this limitation, we show that ensembling several NOs can identify high-error regions and provide good uncertainty estimates that are well-correlated with prediction errors. Based on this, we propose a cost-effective alternative, DiverseNO, that mimics the properties of the ensemble by encouraging diverse predictions from its multiple heads in the last feed-forward layer. We then introduce Operator-ProbConserv, a method that uses these well-calibrated UQ estimates within the ProbConserv framework to update the model. Our empirical results show that Operator-ProbConserv enhances OOD model performance for a variety of challenging PDE problems and satisfies physical constraints such as conservation laws.
Read more6/13/2024