Learning Hamiltonian neural Koopman operator and simultaneously sustaining and discovering conservation law

0
Sign in to get full access
Overview
- This paper presents a novel approach for learning a Hamiltonian neural Koopman operator, which can simultaneously sustain and discover conservation laws.
- The Hamiltonian neural Koopman operator is a powerful tool for modeling complex dynamical systems, building on physics-informed neural networks, Koopman neural operators, and Koopman theory.
- The method presented in this paper can learn the Hamiltonian structure and associated conservation laws directly from data, without prior knowledge of the system's governing equations.
Plain English Explanation
The paper describes a new approach for modeling the behavior of complex systems, such as mechanical, biological, or environmental systems. These systems often have underlying laws of conservation, where certain properties are maintained over time, like energy or momentum. The authors' method can automatically discover these conservation laws from data, without needing to know the specific mathematical equations governing the system.
The key idea is to use a neural network architecture that is designed to capture the Hamiltonian structure of the system. The Hamiltonian is a fundamental concept in physics that describes the total energy of a system. By training the neural network to learn the Hamiltonian, the authors can also extract the associated conservation laws, which describe quantities that remain constant over time.
This is a powerful capability, as it allows the model to not only accurately predict the future behavior of the system, but also uncover the underlying principles governing that behavior. The authors demonstrate the effectiveness of their approach on several example systems, including robotic systems and time-dependent Hamiltonians.
Technical Explanation
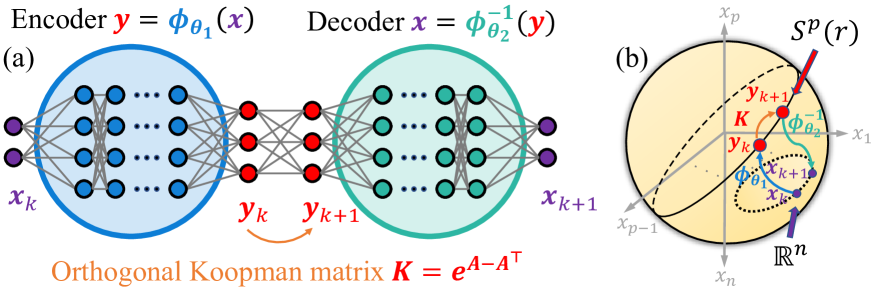
The core of the authors' approach is the Hamiltonian neural Koopman operator, which combines several key concepts from machine learning and dynamical systems theory. The Koopman operator is a linear operator that can capture the nonlinear dynamics of a system, as described in previous work. The authors extend this idea by parameterizing the Koopman operator using a neural network, allowing it to learn complex, nonlinear transformations of the system's state.
Importantly, the neural network architecture is designed to respect the Hamiltonian structure of the system. This means that the network learns a representation of the system's Hamiltonian function, which describes the total energy of the system. By doing so, the network can automatically discover any conservation laws that are present, without requiring prior knowledge of the system's governing equations.
The authors demonstrate the effectiveness of their approach on several benchmark problems, including the double pendulum, Duffing oscillator, and Lorenz system. They show that the Hamiltonian neural Koopman operator can accurately predict the future behavior of these systems, while also uncovering the underlying conservation laws.
Critical Analysis
One strength of the authors' approach is its ability to discover conservation laws directly from data, without requiring explicit knowledge of the system's governing equations. This is a valuable capability, as many real-world systems are complex and their underlying physics may not be fully understood.
However, the authors acknowledge that their method relies on the assumption that the system's dynamics can be well-approximated by a Hamiltonian structure. While this is a reasonable assumption for many physical systems, there may be cases where the Hamiltonian structure is not a good fit, and the method may struggle to accurately model the system's behavior.
Additionally, the authors note that their approach can be computationally intensive, particularly for high-dimensional systems. This may limit its practical applicability in certain domains, where real-time performance is a critical requirement.
Overall, the Hamiltonian neural Koopman operator represents a promising approach for modeling complex dynamical systems and uncovering their underlying conservation laws. The authors' work builds on and extends several important developments in machine learning and dynamical systems theory, and the results demonstrate the potential of this approach. Further research and development may help to address the identified limitations and expand the range of applications.
Conclusion
The paper presents a novel method for learning a Hamiltonian neural Koopman operator, which can simultaneously model the dynamics of complex systems and discover their underlying conservation laws. This capability is valuable for a wide range of applications, from engineering and physics to biology and environmental science, where understanding the fundamental principles governing a system's behavior is crucial.
The authors' approach combines key concepts from machine learning, such as neural networks and Koopman operators, with the Hamiltonian formulation of dynamics. By learning the Hamiltonian structure directly from data, the method can uncover conservation laws without requiring prior knowledge of the system's governing equations. This represents an important advancement in the field of dynamical systems modeling and analysis.
While the method has some limitations, such as computational complexity and the assumption of Hamiltonian structure, the authors' work demonstrates the potential of this approach and opens up new avenues for further research and development. As the field of machine learning continues to evolve, techniques like the Hamiltonian neural Koopman operator may play an increasingly important role in our understanding and modeling of complex, real-world systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Learning Hamiltonian neural Koopman operator and simultaneously sustaining and discovering conservation law
Jingdong Zhang, Qunxi Zhu, Wei Lin
Accurately finding and predicting dynamics based on the observational data with noise perturbations is of paramount significance but still a major challenge presently. Here, for the Hamiltonian mechanics, we propose the Hamiltonian Neural Koopman Operator (HNKO), integrating the knowledge of mathematical physics in learning the Koopman operator, and making it automatically sustain and even discover the conservation laws. We demonstrate the outperformance of the HNKO and its extension using a number of representative physical systems even with hundreds or thousands of freedoms. Our results suggest that feeding the prior knowledge of the underlying system and the mathematical theory appropriately to the learning framework can reinforce the capability of machine learning in solving physical problems.
Read more6/5/2024

0
Learning Generalized Hamiltonians using fully Symplectic Mappings
Harsh Choudhary, Chandan Gupta, Vyacheslav kungrutsev, Melvin Leok, Georgios Korpas
Many important physical systems can be described as the evolution of a Hamiltonian system, which has the important property of being conservative, that is, energy is conserved throughout the evolution. Physics Informed Neural Networks and in particular Hamiltonian Neural Networks have emerged as a mechanism to incorporate structural inductive bias into the NN model. By ensuring physical invariances are conserved, the models exhibit significantly better sample complexity and out-of-distribution accuracy than standard NNs. Learning the Hamiltonian as a function of its canonical variables, typically position and velocity, from sample observations of the system thus becomes a critical task in system identification and long-term prediction of system behavior. However, to truly preserve the long-run physical conservation properties of Hamiltonian systems, one must use symplectic integrators for a forward pass of the system's simulation. While symplectic schemes have been used in the literature, they are thus far limited to situations when they reduce to explicit algorithms, which include the case of separable Hamiltonians or augmented non-separable Hamiltonians. We extend it to generalized non-separable Hamiltonians, and noting the self-adjoint property of symplectic integrators, we bypass computationally intensive backpropagation through an ODE solver. We show that the method is robust to noise and provides a good approximation of the system Hamiltonian when the state variables are sampled from a noisy observation. In the numerical results, we show the performance of the method concerning Hamiltonian reconstruction and conservation, indicating its particular advantage for non-separable systems.
Read more9/18/2024

0
Harnessing the Power of Neural Operators with Automatically Encoded Conservation Laws
Ning Liu, Yiming Fan, Xianyi Zeng, Milan Klower, Lu Zhang, Yue Yu
Neural operators (NOs) have emerged as effective tools for modeling complex physical systems in scientific machine learning. In NOs, a central characteristic is to learn the governing physical laws directly from data. In contrast to other machine learning applications, partial knowledge is often known a priori about the physical system at hand whereby quantities such as mass, energy and momentum are exactly conserved. Currently, NOs have to learn these conservation laws from data and can only approximately satisfy them due to finite training data and random noise. In this work, we introduce conservation law-encoded neural operators (clawNOs), a suite of NOs that endow inference with automatic satisfaction of such conservation laws. ClawNOs are built with a divergence-free prediction of the solution field, with which the continuity equation is automatically guaranteed. As a consequence, clawNOs are compliant with the most fundamental and ubiquitous conservation laws essential for correct physical consistency. As demonstrations, we consider a wide variety of scientific applications ranging from constitutive modeling of material deformation, incompressible fluid dynamics, to atmospheric simulation. ClawNOs significantly outperform the state-of-the-art NOs in learning efficacy, especially in small-data regimes.
Read more6/6/2024
🧠
0
Physics-informed neural networks via stochastic Hamiltonian dynamics learning
Chandrajit Bajaj, Minh Nguyen
In this paper, we propose novel learning frameworks to tackle optimal control problems by applying the Pontryagin maximum principle and then solving for a Hamiltonian dynamical system. Applying the Pontryagin maximum principle to the original optimal control problem shifts the learning focus to reduced Hamiltonian dynamics and corresponding adjoint variables. Then, the reduced Hamiltonian networks can be learned by going backwards in time and then minimizing loss function deduced from the Pontryagin maximum principle's conditions. The learning process is further improved by progressively learning a posterior distribution of the reduced Hamiltonians. This is achieved through utilizing a variational autoencoder which leads to more effective path exploration process. We apply our learning frameworks called NeuralPMP to various control tasks and obtain competitive results.
Read more4/29/2024