A High-Fidelity Simulation Framework for Grasping Stability Analysis in Human Casualty Manipulation
2404.03741
0
0

Abstract
Recently, there has been a growing interest in rescue robots due to their vital role in addressing emergency scenarios and providing crucial support in challenging or hazardous situations where human intervention is difficult. However, very few of these robots are capable of actively engaging with humans and undertaking physical manipulation tasks. This limitation is largely attributed to the absence of tools that can realistically simulate physical interactions, especially the contact mechanisms between a robotic gripper and a human body. In this letter, we aim to address key limitations in current developments towards robotic casualty manipulation. Firstly, we present an integrative simulation framework for casualty manipulation. We adapt a finite element method (FEM) tool into the grasping and manipulation scenario, and the developed framework can provide accurate biomechanical reactions resulting from manipulation. Secondly, we conduct a detailed assessment of grasping stability during casualty grasping and manipulation simulations. To validate the necessity and superior performance of the proposed high-fidelity simulation framework, we conducted a qualitative and quantitative comparison of grasping stability analyses between the proposed framework and the state-of-the-art multi-body physics simulations. Through these efforts, we have taken the first step towards a feasible solution for robotic casualty manipulation.
Create account to get full access
Overview
- This paper presents a high-fidelity simulation framework for analyzing the stability of grasping human casualties during manipulation tasks.
- The framework aims to improve the safety and effectiveness of rescue operations by enabling the assessment of grasp stability under various conditions.
- The paper describes the key components of the simulation system, including the human body model, the grasping mechanism, and the physics-based simulation engine.
Plain English Explanation
When rescuing injured people, it's crucial to handle them carefully to avoid further harm. This paper introduces a simulation tool that can help analyze the stability of how rescuers grasp and move human casualties. The researchers developed a detailed computer model of the human body and the ways it can be grasped, then used physics-based simulations to test different grasping techniques under various conditions.
This allows them to assess the stability and safety of different grasping approaches before trying them in the real world. For example, the simulation could help determine the best way to lift and carry an unconscious person without risking further injury. By testing these scenarios in the virtual environment, rescue teams can improve their techniques and prepare for the challenges they may face in the field.
Technical Explanation
The researchers created a high-fidelity simulation framework to analyze the stability of grasping human casualties during manipulation tasks. The key components of their system include:
-
Human Body Model: The framework uses an advanced 3D model of the human body that accurately represents the anatomy, including bones, muscles, and joints. This allows for realistic simulation of the body's behavior and responses to different grasping and manipulation actions.
-
Grasping Mechanism: The simulation incorporates a detailed model of the grasping mechanism, which can be adjusted to represent different types of grips and handling techniques. This enables the evaluation of a wide range of grasping strategies.
-
Physics-based Simulation: The framework utilizes a physics-based simulation engine to model the interactions between the grasping mechanism and the human body model. This allows for the realistic simulation of forces, torques, and other physical phenomena involved in the manipulation of human casualties.
By integrating these components, the researchers can run simulations that mimic real-world rescue scenarios, allowing them to assess the stability and safety of different grasping approaches. This information can then be used to improve rescue protocols and training for emergency responders.
Critical Analysis
The simulation framework presented in this paper represents an important step forward in the field of human casualty manipulation, as it provides a valuable tool for testing and evaluating grasping techniques in a safe and controlled environment. However, the researchers acknowledge several limitations and areas for further research:
-
Model Validation: While the human body model and grasping mechanism are designed to be highly realistic, there is a need for further validation of the simulation's accuracy against real-world data. This could involve comparing the simulation results to observations from actual rescue operations.
-
Environmental Factors: The current framework focuses on the interaction between the grasping mechanism and the human body, but does not fully account for the influence of environmental factors, such as terrain, obstacles, or weather conditions. Incorporating these elements could enhance the realism and applicability of the simulations.
-
User Interface and Usability: The ease of use and accessibility of the simulation framework for emergency responders and researchers could be an area for improvement. Developing a more user-friendly interface and streamlining the simulation workflow could increase the adoption and impact of the tool.
-
Ethical Considerations: While the framework is designed to improve the safety and effectiveness of rescue operations, there may be ethical concerns around the use of simulated human models for such purposes. The researchers should address these issues and ensure the framework is developed and used in an ethical and responsible manner.
Conclusion
The high-fidelity simulation framework presented in this paper represents a significant advancement in the field of human casualty manipulation. By enabling the analysis of grasping stability and safety under various conditions, the tool has the potential to enhance the training and preparation of emergency responders, ultimately improving the outcomes of rescue operations and reducing the risk of further injury to casualties.
As the researchers continue to refine and expand the framework, it is important to address the identified limitations and ethical considerations to ensure the tool is used responsibly and effectively. With further development and validation, this simulation-based approach could become an invaluable resource for improving the safety and effectiveness of emergency response efforts worldwide.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔗
Physically Consistent Online Inertial Adaptation for Humanoid Loco-manipulation
James Foster, Stephen McCrory, Christian DeBuys, Sylvain Bertrand, Robert Griffin
0
0
The ability to accomplish manipulation and locomotion tasks in the presence of significant time-varying external loads is a remarkable skill of humans that has yet to be replicated convincingly by humanoid robots. Such an ability will be a key requirement in the environments we envision deploying our robots: dull, dirty, and dangerous. External loads constitute a large model bias, which is typically unaccounted for. In this work, we enable our humanoid robot to engage in loco-manipulation tasks in the presence of significant model bias due to external loads. We propose an online estimation and control framework involving the combination of a physically consistent extended Kalman filter for inertial parameter estimation coupled to a whole-body controller. We showcase our results both in simulation and in hardware, where weights are mounted on Nadia's wrist links as a proxy for engaging in tasks where large external loads are applied to the robot.
5/14/2024
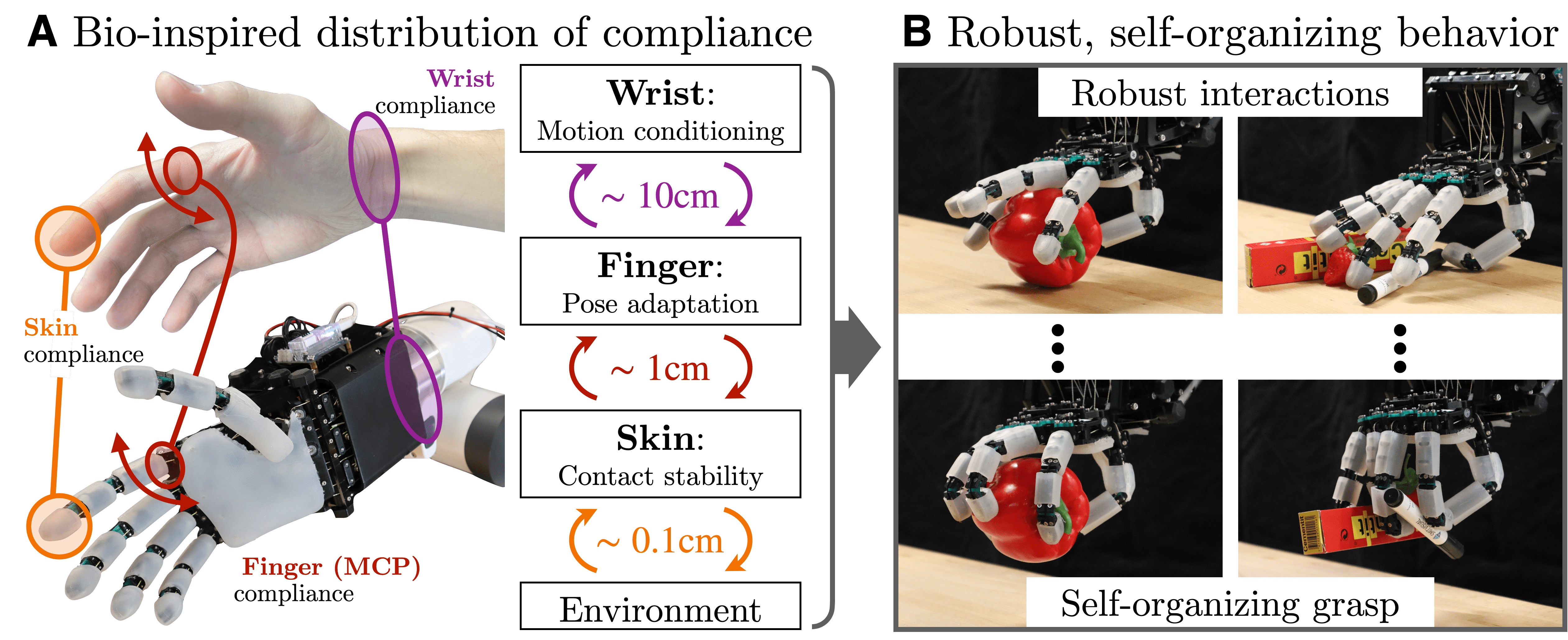
Robust Anthropomorphic Robotic Manipulation through Biomimetic Distributed Compliance
Kai Junge, Josie Hughes
0
0
The impressive capabilities of humans to robustly perform manipulation relies on compliant interactions, enabled through the structure and materials spatially distributed in our hands. We propose by mimicking this distributed compliance in an anthropomorphic robotic hand, the open-loop manipulation robustness increases and observe the emergence of human-like behaviours. To achieve this, we introduce the ADAPT Hand equipped with tunable compliance throughout the skin, fingers, and the wrist. Through extensive automated pick-and-place tests, we show the grasping robustness closely mirrors an estimated geometric theoretical limit, while `stress-testing' the robot hand to perform 800+ grasps. Finally, 24 items with largely varying geometries are grasped in a constrained environment with a success rate of 93%. We demonstrate the hand-object self-organization behavior underlines this extreme robustness, where the hand automatically exhibits different grasp types depending on object geometries. Furthermore, the robot grasp type mimics a natural human grasp with a direct similarity of 68%.
4/16/2024
🔄
QuasiSim: Parameterized Quasi-Physical Simulators for Dexterous Manipulations Transfer
Xueyi Liu, Kangbo Lyu, Jieqiong Zhang, Tao Du, Li Yi
0
0
We explore the dexterous manipulation transfer problem by designing simulators. The task wishes to transfer human manipulations to dexterous robot hand simulations and is inherently difficult due to its intricate, highly-constrained, and discontinuous dynamics and the need to control a dexterous hand with a DoF to accurately replicate human manipulations. Previous approaches that optimize in high-fidelity black-box simulators or a modified one with relaxed constraints only demonstrate limited capabilities or are restricted by insufficient simulation fidelity. We introduce parameterized quasi-physical simulators and a physics curriculum to overcome these limitations. The key ideas are 1) balancing between fidelity and optimizability of the simulation via a curriculum of parameterized simulators, and 2) solving the problem in each of the simulators from the curriculum, with properties ranging from high task optimizability to high fidelity. We successfully enable a dexterous hand to track complex and diverse manipulations in high-fidelity simulated environments, boosting the success rate by 11%+ from the best-performed baseline. The project website is available at https://meowuu7.github.io/QuasiSim/.
4/12/2024
👨🏫
Evaluating Real-World Robot Manipulation Policies in Simulation
Xuanlin Li, Kyle Hsu, Jiayuan Gu, Karl Pertsch, Oier Mees, Homer Rich Walke, Chuyuan Fu, Ishikaa Lunawat, Isabel Sieh, Sean Kirmani, Sergey Levine, Jiajun Wu, Chelsea Finn, Hao Su, Quan Vuong, Ted Xiao
0
0
The field of robotics has made significant advances towards generalist robot manipulation policies. However, real-world evaluation of such policies is not scalable and faces reproducibility challenges, which are likely to worsen as policies broaden the spectrum of tasks they can perform. We identify control and visual disparities between real and simulated environments as key challenges for reliable simulated evaluation and propose approaches for mitigating these gaps without needing to craft full-fidelity digital twins of real-world environments. We then employ these approaches to create SIMPLER, a collection of simulated environments for manipulation policy evaluation on common real robot setups. Through paired sim-and-real evaluations of manipulation policies, we demonstrate strong correlation between policy performance in SIMPLER environments and in the real world. Additionally, we find that SIMPLER evaluations accurately reflect real-world policy behavior modes such as sensitivity to various distribution shifts. We open-source all SIMPLER environments along with our workflow for creating new environments at https://simpler-env.github.io to facilitate research on general-purpose manipulation policies and simulated evaluation frameworks.
5/10/2024