Evaluating Real-World Robot Manipulation Policies in Simulation
2405.05941
0
0
👨🏫
Abstract
The field of robotics has made significant advances towards generalist robot manipulation policies. However, real-world evaluation of such policies is not scalable and faces reproducibility challenges, which are likely to worsen as policies broaden the spectrum of tasks they can perform. We identify control and visual disparities between real and simulated environments as key challenges for reliable simulated evaluation and propose approaches for mitigating these gaps without needing to craft full-fidelity digital twins of real-world environments. We then employ these approaches to create SIMPLER, a collection of simulated environments for manipulation policy evaluation on common real robot setups. Through paired sim-and-real evaluations of manipulation policies, we demonstrate strong correlation between policy performance in SIMPLER environments and in the real world. Additionally, we find that SIMPLER evaluations accurately reflect real-world policy behavior modes such as sensitivity to various distribution shifts. We open-source all SIMPLER environments along with our workflow for creating new environments at https://simpler-env.github.io to facilitate research on general-purpose manipulation policies and simulated evaluation frameworks.
Create account to get full access
Overview
- Robotics has made significant progress in developing generalist robot manipulation policies
- Evaluating these policies in the real world is challenging due to scalability and reproducibility issues
- Differences between simulated and real-world environments are key challenges for reliable simulated evaluation
- This paper proposes approaches to mitigate these gaps and introduces SIMPLER, a collection of simulated environments for manipulation policy evaluation
Plain English Explanation
Robots are getting better at performing a wide range of manipulation tasks, like picking up and moving objects. However, testing these advanced robot control policies in the real world is difficult to scale up and hard to consistently reproduce. The role of action space in robot manipulation learning from sim and GEnCHIP: Generating Robot Policy Code for High-Precision have explored similar challenges.
The key issue is that simulated robot environments don't perfectly match the real world. There are differences in how the robot controls its movements and in how the robot perceives its surroundings. These "control and visual disparities" make it hard to reliably evaluate new robot policies in simulation before testing them in the physical world.
To address this, the researchers propose methods to reduce the gaps between simulated and real-world environments. They then use these techniques to create SIMPLER - a set of simulated testing environments that closely mimic common real-world robot setups. By evaluating policies in SIMPLER and comparing to real-world performance, the researchers show a strong correlation. This suggests SIMPLER can accurately predict how a robot policy will behave in the real world, helping researchers develop and test new robot manipulation abilities without needing extensive real-world trials.
Technical Explanation
The researchers identify control and visual disparities between simulated and real-world robot environments as key challenges for reliable simulated evaluation of generalist robot manipulation policies. They propose techniques to mitigate these gaps without requiring full-fidelity digital twins of real-world setups.
The control disparities relate to differences in how the robot's low-level actions translate to movements in the simulated versus physical environments. The visual disparities refer to discrepancies in how the robot perceives its surroundings in simulation versus reality, for example in sensing object shapes and positions.
To address the control disparities, the researchers leverage techniques like ASID: Active Exploration for System Identification in Robotic Manipulation to automatically calibrate the simulation dynamics. For visual disparities, they use approaches like Part-Guided 3D RL for Sim-to-Real Articulated Object to improve the fidelity of object rendering and pose estimation in simulation.
The researchers then leverage these techniques to create SIMPLER - a collection of simulated test environments that mimic common real-world robot manipulation setups. Through paired evaluation of policies in SIMPLER and the real world, they demonstrate strong correlation in performance, as well as the ability of SIMPLER to capture real-world policy behavior modes like sensitivity to distribution shifts.
Critical Analysis
The paper presents a thoughtful approach to addressing key challenges in evaluating generalist robot manipulation policies through simulation. The proposed techniques for mitigating control and visual disparities between simulated and real-world environments are a pragmatic step forward, avoiding the need for full-fidelity digital twins which may be impractical.
However, the paper acknowledges that the SIMPLER environments may not capture all aspects of real-world complexity, and that further research is needed to improve the fidelity and generalization of simulated evaluation frameworks. Additionally, the reliance on specific techniques like ASID and part-guided 3D RL means the SIMPLER approach may be limited to certain robotic setups and perceptual capabilities.
It would be valuable to see the SIMPLER framework expanded to a broader range of real-world robot manipulation tasks and environments, and to explore the scalability and automation of the calibration and environment creation processes. Rigorous comparisons to other simulated evaluation methods, as well as further validation on a wider range of real-world robot policies, could also strengthen the claims about SIMPLER's predictive power.
Conclusion
This paper tackles an important challenge in robotics - how to reliably evaluate advanced robot manipulation policies in simulation before deploying them in the real world. By identifying key disparities between simulated and physical environments, and proposing techniques to mitigate these gaps, the researchers have developed SIMPLER - a collection of simulated test environments that can accurately predict the performance and behavior of robot policies in the real world.
This work represents a valuable step towards more scalable and reproducible evaluation of generalist robot manipulation capabilities, which could accelerate the development and deployment of sophisticated robotic systems. The open-sourcing of the SIMPLER environments and workflows is a commendable effort to facilitate further research in this direction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

DrEureka: Language Model Guided Sim-To-Real Transfer
Yecheng Jason Ma, William Liang, Hung-Ju Wang, Sam Wang, Yuke Zhu, Linxi Fan, Osbert Bastani, Dinesh Jayaraman
0
0
Transferring policies learned in simulation to the real world is a promising strategy for acquiring robot skills at scale. However, sim-to-real approaches typically rely on manual design and tuning of the task reward function as well as the simulation physics parameters, rendering the process slow and human-labor intensive. In this paper, we investigate using Large Language Models (LLMs) to automate and accelerate sim-to-real design. Our LLM-guided sim-to-real approach, DrEureka, requires only the physics simulation for the target task and automatically constructs suitable reward functions and domain randomization distributions to support real-world transfer. We first demonstrate that our approach can discover sim-to-real configurations that are competitive with existing human-designed ones on quadruped locomotion and dexterous manipulation tasks. Then, we showcase that our approach is capable of solving novel robot tasks, such as quadruped balancing and walking atop a yoga ball, without iterative manual design.
6/5/2024
🔄
Sim-To-Real Transfer for Visual Reinforcement Learning of Deformable Object Manipulation for Robot-Assisted Surgery
Paul Maria Scheikl, Eleonora Tagliabue, Bal'azs Gyenes, Martin Wagner, Diego Dall'Alba, Paolo Fiorini, Franziska Mathis-Ullrich
0
0
Automation holds the potential to assist surgeons in robotic interventions, shifting their mental work load from visuomotor control to high level decision making. Reinforcement learning has shown promising results in learning complex visuomotor policies, especially in simulation environments where many samples can be collected at low cost. A core challenge is learning policies in simulation that can be deployed in the real world, thereby overcoming the sim-to-real gap. In this work, we bridge the visual sim-to-real gap with an image-based reinforcement learning pipeline based on pixel-level domain adaptation and demonstrate its effectiveness on an image-based task in deformable object manipulation. We choose a tissue retraction task because of its importance in clinical reality of precise cancer surgery. After training in simulation on domain-translated images, our policy requires no retraining to perform tissue retraction with a 50% success rate on the real robotic system using raw RGB images. Furthermore, our sim-to-real transfer method makes no assumptions on the task itself and requires no paired images. This work introduces the first successful application of visual sim-to-real transfer for robotic manipulation of deformable objects in the surgical field, which represents a notable step towards the clinical translation of cognitive surgical robotics.
6/11/2024
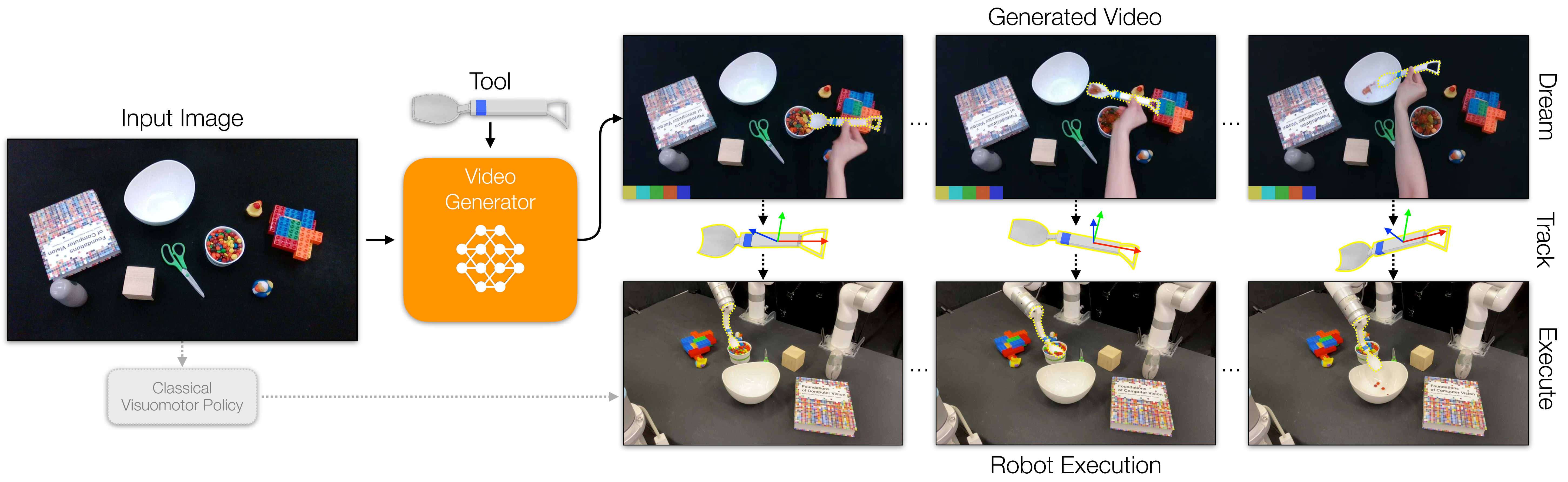
Dreamitate: Real-World Visuomotor Policy Learning via Video Generation
Junbang Liang, Ruoshi Liu, Ege Ozguroglu, Sruthi Sudhakar, Achal Dave, Pavel Tokmakov, Shuran Song, Carl Vondrick
0
0
A key challenge in manipulation is learning a policy that can robustly generalize to diverse visual environments. A promising mechanism for learning robust policies is to leverage video generative models, which are pretrained on large-scale datasets of internet videos. In this paper, we propose a visuomotor policy learning framework that fine-tunes a video diffusion model on human demonstrations of a given task. At test time, we generate an example of an execution of the task conditioned on images of a novel scene, and use this synthesized execution directly to control the robot. Our key insight is that using common tools allows us to effortlessly bridge the embodiment gap between the human hand and the robot manipulator. We evaluate our approach on four tasks of increasing complexity and demonstrate that harnessing internet-scale generative models allows the learned policy to achieve a significantly higher degree of generalization than existing behavior cloning approaches.
6/26/2024
TRANSIC: Sim-to-Real Policy Transfer by Learning from Online Correction
Yunfan Jiang, Chen Wang, Ruohan Zhang, Jiajun Wu, Li Fei-Fei
0
0
Learning in simulation and transferring the learned policy to the real world has the potential to enable generalist robots. The key challenge of this approach is to address simulation-to-reality (sim-to-real) gaps. Previous methods often require domain-specific knowledge a priori. We argue that a straightforward way to obtain such knowledge is by asking humans to observe and assist robot policy execution in the real world. The robots can then learn from humans to close various sim-to-real gaps. We propose TRANSIC, a data-driven approach to enable successful sim-to-real transfer based on a human-in-the-loop framework. TRANSIC allows humans to augment simulation policies to overcome various unmodeled sim-to-real gaps holistically through intervention and online correction. Residual policies can be learned from human corrections and integrated with simulation policies for autonomous execution. We show that our approach can achieve successful sim-to-real transfer in complex and contact-rich manipulation tasks such as furniture assembly. Through synergistic integration of policies learned in simulation and from humans, TRANSIC is effective as a holistic approach to addressing various, often coexisting sim-to-real gaps. It displays attractive properties such as scaling with human effort. Videos and code are available at https://transic-robot.github.io/
5/17/2024