How NeRFs and 3D Gaussian Splatting are Reshaping SLAM: a Survey
2402.13255
0
0

Abstract
Over the past two decades, research in the field of Simultaneous Localization and Mapping (SLAM) has undergone a significant evolution, highlighting its critical role in enabling autonomous exploration of unknown environments. This evolution ranges from hand-crafted methods, through the era of deep learning, to more recent developments focused on Neural Radiance Fields (NeRFs) and 3D Gaussian Splatting (3DGS) representations. Recognizing the growing body of research and the absence of a comprehensive survey on the topic, this paper aims to provide the first comprehensive overview of SLAM progress through the lens of the latest advancements in radiance fields. It sheds light on the background, evolutionary path, inherent strengths and limitations, and serves as a fundamental reference to highlight the dynamic progress and specific challenges.
Create account to get full access
Overview
- This paper provides a comprehensive survey of how recent advancements in neural radiance fields (NeRFs) and 3D Gaussian splatting are reshaping the field of Simultaneous Localization and Mapping (SLAM).
- SLAM is a fundamental problem in robotics and computer vision, where an agent (e.g., a robot or a camera) must simultaneously map its surrounding environment and localize itself within that environment.
- The paper examines how NeRFs and 3D Gaussian splatting, two emerging techniques in 3D reconstruction and mapping, are transforming SLAM algorithms, leading to more accurate, efficient, and dense visual SLAM systems.
Plain English Explanation
NeRFs and 3D Gaussian Splatting are Reshaping SLAM: a Survey
SLAM is a crucial technology that allows robots and other autonomous systems to understand and navigate their surroundings. It involves two main tasks: mapping the environment and figuring out where the system is located within that map.
Recent advancements in deep learning and 3D reconstruction have led to the development of new techniques, such as neural radiance fields (NeRFs) and 3D Gaussian splatting, that are reshaping how SLAM systems work.
NeRFs are a way to create 3D models of scenes by learning how light interacts with objects, allowing for more detailed and accurate reconstructions. 3D Gaussian splatting is a method for representing 3D geometry that can be more efficient and robust than traditional approaches.
By incorporating these new techniques, SLAM systems are becoming more effective at mapping environments and localizing themselves within those maps. This leads to denser and more accurate visual SLAM, as well as the ability to handle dynamic environments and perform semantic understanding.
The survey paper provides a comprehensive overview of these advancements and their implications for the future of SLAM technology.
Technical Explanation
The paper begins by introducing the fundamental problem of SLAM, where an agent must simultaneously map its environment and localize itself within that map. It then discusses how recent advancements in deep learning and 3D reconstruction, specifically neural radiance fields (NeRFs) and 3D Gaussian splatting, are transforming SLAM algorithms.
NeRFs are a novel approach to 3D scene representation that learns to model the volumetric light transport in a scene, allowing for highly detailed and accurate 3D reconstructions. By incorporating NeRFs into SLAM systems, researchers have developed NESLAM, a technique that uses NeRFs for self-supervised feature learning and mapping.
In parallel, 3D Gaussian splatting has emerged as a more efficient and robust method for representing 3D geometry. The paper examines how Feature-3DGS and 3D Geometry-Aware Deformable Gaussian Splatting leverage 3D Gaussian splatting to improve the performance and flexibility of SLAM systems, enabling them to handle dynamic environments and perform semantic understanding.
The survey also covers the GS-SLAM system, which combines NeRFs and 3D Gaussian splatting to create a dense visual SLAM algorithm that outperforms traditional approaches in accuracy and efficiency.
Critical Analysis
The paper provides a thorough and well-researched overview of the emerging trends in SLAM, highlighting the significant impact of NeRFs and 3D Gaussian splatting. However, the authors acknowledge that these techniques are still nascent, and there are several areas for further research and improvement.
One potential limitation is the computational complexity of NeRF-based approaches, which may limit their real-time performance in some applications. Additionally, the reliance on accurate camera poses and calibration for NeRF training could be a bottleneck in practical SLAM scenarios.
The paper also notes that handling dynamic environments and performing semantic understanding remain challenging problems, even with the advancements in 3D Gaussian splatting. More work is needed to robustly incorporate these capabilities into SLAM systems.
Overall, the survey suggests that NeRFs and 3D Gaussian splatting represent promising directions for the future of SLAM, but further research and optimization are necessary to fully realize their potential.
Conclusion
This survey paper highlights the transformative impact of neural radiance fields (NeRFs) and 3D Gaussian splatting on the field of Simultaneous Localization and Mapping (SLAM). By incorporating these emerging techniques, SLAM systems are becoming more accurate, efficient, and capable of handling complex environments and tasks.
The advancements discussed in the paper, such as NESLAM, Feature-3DGS, and GS-SLAM, demonstrate the potential of NeRFs and 3D Gaussian splatting to revolutionize how robots and autonomous systems perceive and navigate their surroundings. As these technologies continue to evolve, they may unlock new possibilities for more intelligent and versatile SLAM-powered applications in robotics, augmented reality, and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

NGM-SLAM: Gaussian Splatting SLAM with Radiance Field Submap
Mingrui Li, Jingwei Huang, Lei Sun, Aaron Xuxiang Tian, Tianchen Deng, Hongyu Wang
0
0
SLAM systems based on Gaussian Splatting have garnered attention due to their capabilities for rapid real-time rendering and high-fidelity mapping. However, current Gaussian Splatting SLAM systems usually struggle with large scene representation and lack effective loop closure detection. To address these issues, we introduce NGM-SLAM, the first 3DGS based SLAM system that utilizes neural radiance field submaps for progressive scene expression, effectively integrating the strengths of neural radiance fields and 3D Gaussian Splatting. We utilize neural radiance field submaps as supervision and achieve high-quality scene expression and online loop closure adjustments through Gaussian rendering of fused submaps. Our results on multiple real-world scenes and large-scale scene datasets demonstrate that our method can achieve accurate hole filling and high-quality scene expression, supporting monocular, stereo, and RGB-D inputs, and achieving state-of-the-art scene reconstruction and tracking performance.
5/28/2024
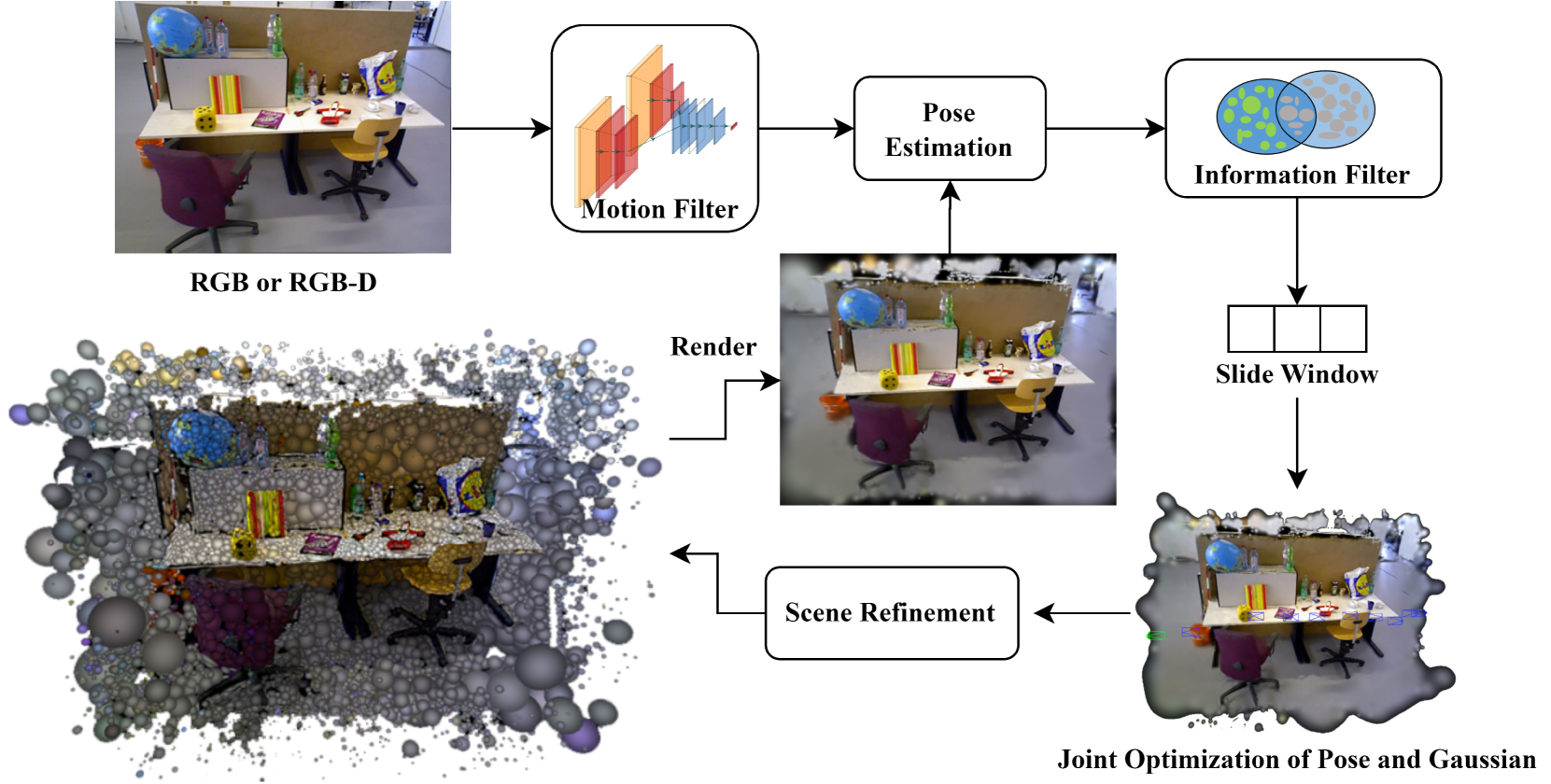
MotionGS : Compact Gaussian Splatting SLAM by Motion Filter
Xinli Guo, Weidong Zhang, Ruonan Liu, Peng Han, Hongtian Chen
0
0
With their high-fidelity scene representation capability, the attention of SLAM field is deeply attracted by the Neural Radiation Field (NeRF) and 3D Gaussian Splatting (3DGS). Recently, there has been a surge in NeRF-based SLAM, while 3DGS-based SLAM is sparse. A novel 3DGS-based SLAM approach with a fusion of deep visual feature, dual keyframe selection and 3DGS is presented in this paper. Compared with the existing methods, the proposed tracking is achieved by feature extraction and motion filter on each frame. The joint optimization of poses and 3D Gaussians runs through the entire mapping process. Additionally, the coarse-to-fine pose estimation and compact Gaussian scene representation are implemented by dual keyframe selection and novel loss functions. Experimental results demonstrate that the proposed algorithm not only outperforms the existing methods in tracking and mapping, but also has less memory usage.
6/3/2024
🧠
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
0
0
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
5/10/2024
🗣️
GS-SLAM: Dense Visual SLAM with 3D Gaussian Splatting
Chi Yan, Delin Qu, Dan Xu, Bin Zhao, Zhigang Wang, Dong Wang, Xuelong Li
0
0
In this paper, we introduce textbf{GS-SLAM} that first utilizes 3D Gaussian representation in the Simultaneous Localization and Mapping (SLAM) system. It facilitates a better balance between efficiency and accuracy. Compared to recent SLAM methods employing neural implicit representations, our method utilizes a real-time differentiable splatting rendering pipeline that offers significant speedup to map optimization and RGB-D rendering. Specifically, we propose an adaptive expansion strategy that adds new or deletes noisy 3D Gaussians in order to efficiently reconstruct new observed scene geometry and improve the mapping of previously observed areas. This strategy is essential to extend 3D Gaussian representation to reconstruct the whole scene rather than synthesize a static object in existing methods. Moreover, in the pose tracking process, an effective coarse-to-fine technique is designed to select reliable 3D Gaussian representations to optimize camera pose, resulting in runtime reduction and robust estimation. Our method achieves competitive performance compared with existing state-of-the-art real-time methods on the Replica, TUM-RGBD datasets. Project page: https://gs-slam.github.io/.
4/9/2024