Human-centered In-building Embodied Delivery Benchmark

0
Sign in to get full access
Overview
- Presents a human-centered in-building embodied delivery benchmark that evaluates the performance of embodied agents in realistic indoor delivery scenarios
- Focuses on key challenges such as navigation, interaction, and coordinating with humans
- Aims to promote the development of more capable and socially-aware embodied AI systems for real-world applications
Plain English Explanation
This research paper introduces a new benchmark for testing how well embodied AI systems (like robots or virtual assistants) can perform indoor delivery tasks in a realistic and human-centered way. The key idea is to create scenarios that mimic real-world situations where an embodied agent needs to navigate an indoor environment, interact with people, and complete a delivery task.
The researchers argue that this is an important challenge for the field of embodied AI, as these systems will need to become more capable and socially aware to be useful in real-world applications like home assistants or delivery robots. By creating a standardized benchmark, the researchers hope to drive progress in areas like efficient exploration, natural interaction, and task completion in unknown environments.
Technical Explanation
The paper defines a set of human-centric delivery scenarios that take place within a simulated indoor environment. These scenarios involve tasks like navigating through a building, interacting with people to locate the delivery recipient, and safely handing off the package. The researchers developed a detailed set of performance metrics to evaluate how well embodied agents can complete these tasks, considering factors like safety, efficiency, and social awareness.
To validate the benchmark, the researchers conducted experiments using several state-of-the-art embodied AI models. The results showed that current systems struggle with the full complexity of the delivery tasks, highlighting opportunities for future research and development. The paper provides insights into the specific challenges faced by the agents, such as difficulties with locating and communicating with humans and adapting their behavior to novel environments.
Critical Analysis
The researchers acknowledge several limitations of the current benchmark, such as the use of a simulated environment and the lack of real-world physical constraints. They also note that the scenarios may not capture the full complexity of actual delivery tasks, which could involve additional factors like weather, traffic, or building accessibility.
While the benchmark provides a valuable starting point for evaluating embodied AI systems, more work is needed to ensure the tasks and metrics are representative of real-world delivery challenges. Careful consideration should be given to the specific design choices and their potential impact on the generalizability of the results.
Furthermore, the paper does not address potential ethical concerns around the use of embodied AI systems for delivery tasks, such as privacy, security, and the impact on human employment. These issues will need to be carefully considered as the technology continues to develop.
Conclusion
Overall, the human-centered in-building embodied delivery benchmark presented in this paper represents an important step forward in the field of embodied AI. By creating a standardized set of tasks and metrics, the researchers aim to drive progress in the development of more capable and socially-aware embodied systems that can operate effectively in complex, real-world environments. As the technology continues to evolve, it will be crucial to consider not only the technical capabilities of these systems but also their social and ethical implications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Human-centered In-building Embodied Delivery Benchmark
Zhuoqun Xu, Yang Liu, Xiaoqi Li, Jiyao Zhang, Hao Dong
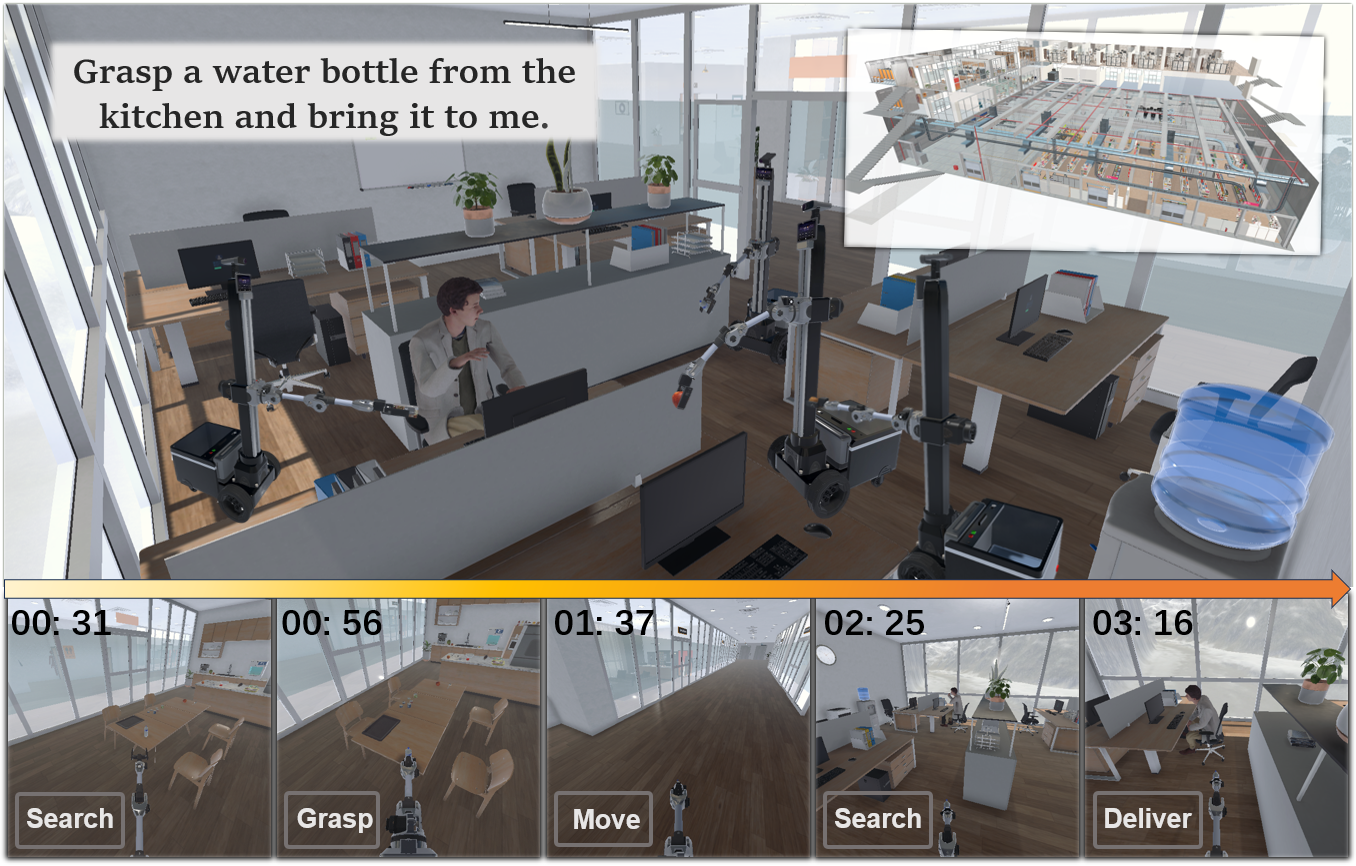
Recently, the concept of embodied intelligence has been widely accepted and popularized, leading people to naturally consider the potential for commercialization in this field. In this work, we propose a specific commercial scenario simulation, human-centered in-building embodied delivery. Furthermore, for this scenario, we have developed a brand-new virtual environment system from scratch, constructing a multi-level connected building space modeled after a polar research station. This environment also includes autonomous human characters and robots with grasping and mobility capabilities, as well as a large number of interactive items. Based on this environment, we have built a delivery dataset containing 13k language instructions to guide robots in providing services. We simulate human behavior through human characters and sample their various needs in daily life. Finally, we proposed a method centered around a large multimodal model to serve as the baseline system for this dataset. Compared to past embodied data work, our work focuses on a virtual environment centered around human-robot interaction for commercial scenarios. We believe this will bring new perspectives and exploration angles to the embodied community.
Read more6/27/2024

0
Aligning Cyber Space with Physical World: A Comprehensive Survey on Embodied AI
Yang Liu, Weixing Chen, Yongjie Bai, Guanbin Li, Wen Gao, Liang Lin
Embodied Artificial Intelligence (Embodied AI) is crucial for achieving Artificial General Intelligence (AGI) and serves as a foundation for various applications that bridge cyberspace and the physical world. Recently, the emergence of Multi-modal Large Models (MLMs) and World Models (WMs) have attracted significant attention due to their remarkable perception, interaction, and reasoning capabilities, making them a promising architecture for the brain of embodied agents. However, there is no comprehensive survey for Embodied AI in the era of MLMs. In this survey, we give a comprehensive exploration of the latest advancements in Embodied AI. Our analysis firstly navigates through the forefront of representative works of embodied robots and simulators, to fully understand the research focuses and their limitations. Then, we analyze four main research targets: 1) embodied perception, 2) embodied interaction, 3) embodied agent, and 4) sim-to-real adaptation, covering the state-of-the-art methods, essential paradigms, and comprehensive datasets. Additionally, we explore the complexities of MLMs in virtual and real embodied agents, highlighting their significance in facilitating interactions in dynamic digital and physical environments. Finally, we summarize the challenges and limitations of embodied AI and discuss their potential future directions. We hope this survey will serve as a foundational reference for the research community and inspire continued innovation. The associated project can be found at https://github.com/HCPLab-SYSU/Embodied_AI_Paper_List.
Read more7/23/2024
🔄
0
Embodied Agents for Efficient Exploration and Smart Scene Description
Roberto Bigazzi, Marcella Cornia, Silvia Cascianelli, Lorenzo Baraldi, Rita Cucchiara
The development of embodied agents that can communicate with humans in natural language has gained increasing interest over the last years, as it facilitates the diffusion of robotic platforms in human-populated environments. As a step towards this objective, in this work, we tackle a setting for visual navigation in which an autonomous agent needs to explore and map an unseen indoor environment while portraying interesting scenes with natural language descriptions. To this end, we propose and evaluate an approach that combines recent advances in visual robotic exploration and image captioning on images generated through agent-environment interaction. Our approach can generate smart scene descriptions that maximize semantic knowledge of the environment and avoid repetitions. Further, such descriptions offer user-understandable insights into the robot's representation of the environment by highlighting the prominent objects and the correlation between them as encountered during the exploration. To quantitatively assess the performance of the proposed approach, we also devise a specific score that takes into account both exploration and description skills. The experiments carried out on both photorealistic simulated environments and real-world ones demonstrate that our approach can effectively describe the robot's point of view during exploration, improving the human-friendly interpretability of its observations.
Read more4/16/2024

0
EmBARDiment: an Embodied AI Agent for Productivity in XR
Riccardo Bovo, Steven Abreu, Karan Ahuja, Eric J Gonzalez, Li-Te Cheng, Mar Gonzalez-Franco
XR devices running chat-bots powered by Large Language Models (LLMs) have tremendous potential as always-on agents that can enable much better productivity scenarios. However, screen based chat-bots do not take advantage of the the full-suite of natural inputs available in XR, including inward facing sensor data, instead they over-rely on explicit voice or text prompts, sometimes paired with multi-modal data dropped as part of the query. We propose a solution that leverages an attention framework that derives context implicitly from user actions, eye-gaze, and contextual memory within the XR environment. This minimizes the need for engineered explicit prompts, fostering grounded and intuitive interactions that glean user insights for the chat-bot. Our user studies demonstrate the imminent feasibility and transformative potential of our approach to streamline user interaction in XR with chat-bots, while offering insights for the design of future XR-embodied LLM agents.
Read more8/16/2024