Human-Robot Cooperative Piano Playing with Learning-Based Real-Time Music Accompaniment

0
🔮
Sign in to get full access
Overview
- This is a template for an Arxiv-style citation, including author names, paper title, page numbers, and DOI.
- The paper covers various aspects of human-robot collaboration, particularly in the context of musical tasks like piano playing.
- Related papers are provided that explore similar topics around human-AI cooperation, creativity, and music.
Plain English Explanation
The provided paper is a template for how to properly cite research papers in the Arxiv style. This includes listing the authors, the title of the paper, the page numbers, and the DOI (a unique identifier for the paper). This standardized citation format makes it easy to reference and find the original research.
The template paper is part of a broader set of research exploring human-robot collaboration, particularly in the context of musical tasks like piano playing. The related papers cover topics like how humans and machines can work together creatively, how robots can assist with musical practices, and the unique challenges of human-AI collaboration.
Technical Explanation
The provided paper is a template that demonstrates the proper format for citing Arxiv research papers. It includes fields for listing the author names, paper title, page numbers, and DOI (digital object identifier). This standardized citation style makes it easy to refer to the original research and locate the full paper.
The template is part of a broader collection of papers exploring human-robot collaboration, especially in musical applications like piano playing. These related papers investigate topics such as how humans and machines can work together creatively, the use of robots to assist with music-making, and the unique challenges that arise when humans and AI systems collaborate.
Critical Analysis
The template paper itself does not contain any original research or analysis. It is simply providing a standardized format for properly citing Arxiv publications. This is a useful reference, as consistent citation practices help maintain the integrity of the scholarly record and make it easier for researchers to locate and access the original sources.
The related papers on human-robot collaboration in musical contexts appear to be more substantive, exploring important questions around the intersection of technology, creativity, and human-AI interaction. However, without reviewing those papers in detail, it is difficult to assess the quality of the research, the validity of the methods and findings, or the broader implications and limitations of the work.
Conclusion
This paper provides a template for citing Arxiv research publications in a standardized format that includes key metadata like author names, paper title, page numbers, and the DOI. While the template itself does not contain original research, it is a useful reference for maintaining consistent citation practices in the scholarly community.
The template is part of a broader collection of papers exploring human-robot collaboration, particularly in musical domains. These related papers appear to investigate important questions around the role of technology in supporting and enhancing human creativity and the unique challenges that arise when humans and AI systems work together. Further critical analysis of the specific research would be needed to fully evaluate the significance and implications of this body of work.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🔮
0
New!Human-Robot Cooperative Piano Playing with Learning-Based Real-Time Music Accompaniment
Huijiang Wang, Xiaoping Zhang, Fumiya Iida
Recent advances in machine learning have paved the way for the development of musical and entertainment robots. However, human-robot cooperative instrument playing remains a challenge, particularly due to the intricate motor coordination and temporal synchronization. In this paper, we propose a theoretical framework for human-robot cooperative piano playing based on non-verbal cues. First, we present a music improvisation model that employs a recurrent neural network (RNN) to predict appropriate chord progressions based on the human's melodic input. Second, we propose a behavior-adaptive controller to facilitate seamless temporal synchronization, allowing the cobot to generate harmonious acoustics. The collaboration takes into account the bidirectional information flow between the human and robot. We have developed an entropy-based system to assess the quality of cooperation by analyzing the impact of different communication modalities during human-robot collaboration. Experiments demonstrate that our RNN-based improvisation can achieve a 93% accuracy rate. Meanwhile, with the MPC adaptive controller, the robot could respond to the human teammate in homophony performances with real-time accompaniment. Our designed framework has been validated to be effective in allowing humans and robots to work collaboratively in the artistic piano-playing task.
Read more9/19/2024

0
Collaboration Between Robots, Interfaces and Humans: Practice-Based and Audience Perspectives
Anna Savery, Richard Savery
This paper provides an analysis of a mixed-media experimental musical work that explores the integration of human musical interaction with a newly developed interface for the violin, manipulated by an improvising violinist, interactive visuals, a robotic drummer and an improvised synthesised orchestra. We first present a detailed technical overview of the systems involved including the design and functionality of each component. We then conduct a practice-based review examining the creative processes and artistic decisions underpinning the work, focusing on the challenges and breakthroughs encountered during its development. Through this introspective analysis, we uncover insights into the collaborative dynamics between the human performer and technological agents, revealing the complexities of blending traditional musical expressiveness with artificial intelligence and robotics. To gauge public reception and interpretive perspectives, we conducted an online survey, sharing a video of the performance with a diverse audience. The feedback collected from this survey offers valuable viewpoints on the accessibility, emotional impact, and perceived artistic value of the work. Respondents' reactions underscore the transformative potential of integrating advanced technologies in musical performance, while also highlighting areas for further exploration and refinement.
Read more7/25/2024

0
Creativity and Visual Communication from Machine to Musician: Sharing a Score through a Robotic Camera
Ross Greer, Laura Fleig, Shlomo Dubnov
This paper explores the integration of visual communication and musical interaction by implementing a robotic camera within a Guided Harmony musical game. We aim to examine co-creative behaviors between human musicians and robotic systems. Our research explores existing methodologies like improvisational game pieces and extends these concepts to include robotic participation using a PTZ camera. The robotic system interprets and responds to nonverbal cues from musicians, creating a collaborative and adaptive musical experience. This initial case study underscores the importance of intuitive visual communication channels. We also propose future research directions, including parameters for refining the visual cue toolkit and data collection methods to understand human-machine co-creativity further. Our findings contribute to the broader understanding of machine intelligence in augmenting human creativity, particularly in musical settings.
Read more9/10/2024
0
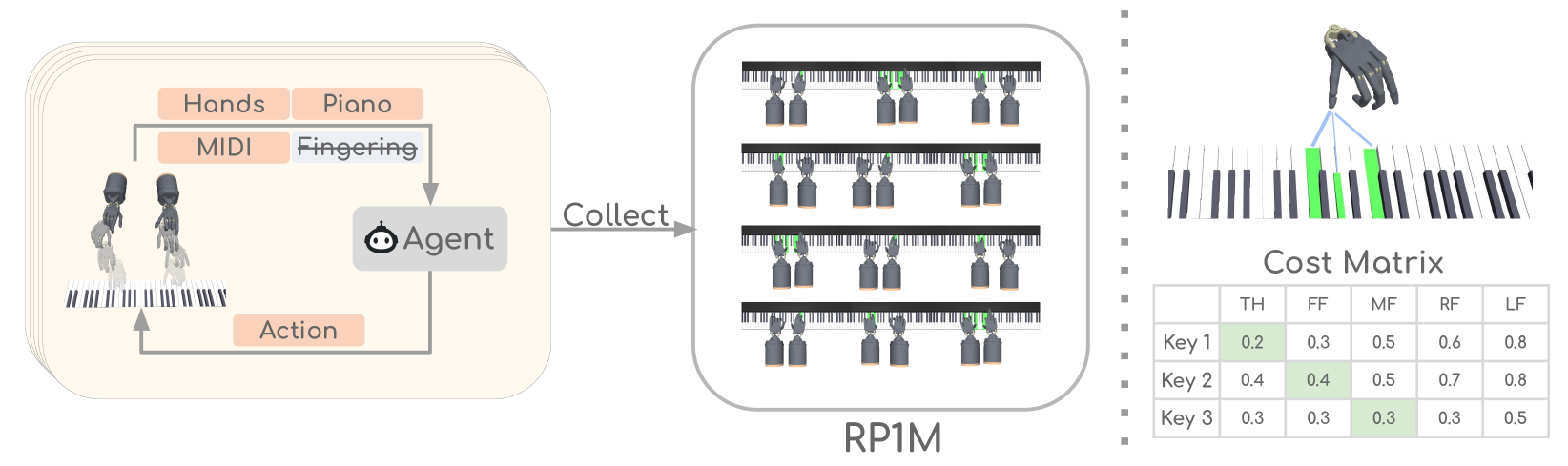
RP1M: A Large-Scale Motion Dataset for Piano Playing with Bi-Manual Dexterous Robot Hands
Yi Zhao, Le Chen, Jan Schneider, Quankai Gao, Juho Kannala, Bernhard Scholkopf, Joni Pajarinen, Dieter Buchler
It has been a long-standing research goal to endow robot hands with human-level dexterity. Bi-manual robot piano playing constitutes a task that combines challenges from dynamic tasks, such as generating fast while precise motions, with slower but contact-rich manipulation problems. Although reinforcement learning based approaches have shown promising results in single-task performance, these methods struggle in a multi-song setting. Our work aims to close this gap and, thereby, enable imitation learning approaches for robot piano playing at scale. To this end, we introduce the Robot Piano 1 Million (RP1M) dataset, containing bi-manual robot piano playing motion data of more than one million trajectories. We formulate finger placements as an optimal transport problem, thus, enabling automatic annotation of vast amounts of unlabeled songs. Benchmarking existing imitation learning approaches shows that such approaches reach state-of-the-art robot piano playing performance by leveraging RP1M.
Read more8/21/2024