RP1M: A Large-Scale Motion Dataset for Piano Playing with Bi-Manual Dexterous Robot Hands

0
Sign in to get full access
Overview
- This paper presents a large-scale dataset called RP1M for piano playing with bi-manual dexterous robot hands.
- The dataset contains over 1 million motion capture frames of piano playing, making it one of the largest motion datasets for this task.
- The dataset aims to enable research on dexterous robot manipulation for tasks like piano playing.
Plain English Explanation
The researchers have created a very large dataset of recordings showing how people move their hands and fingers when playing the piano. This dataset, called RP1M, contains over 1 million individual motion capture frames, making it one of the biggest datasets of its kind.
The goal is to enable further research into getting robots to play the piano in a dexterous and skilled way, like a human. By having such a large and detailed dataset of human piano playing, researchers can use this information to train AI systems and robot controllers to better manipulate their hands and fingers to play the piano similarly to humans.
The dataset could also be useful for other tasks that require dexterous manipulation, like learning generalist piano playing skills or few-shot imitation learning of skilled movements.
Technical Explanation
The RP1M dataset contains over 1 million motion capture frames of professional pianists playing a wide variety of piano pieces. The data was collected using a high-resolution motion capture system that recorded the movements of the pianists' fingers, hands, and arms at a high frame rate.
The researchers designed the data collection process to capture the full dexterity and coordination required for skilled piano playing. The dataset includes recordings of both unimanual (single-handed) and bimanual (two-handed) piano playing, covering a diverse repertoire of musical pieces.
The large scale and detailed nature of the RP1M dataset makes it a valuable resource for training AI models and robot controllers to manipulate their hands in a dexterous way for tasks like piano playing. The dataset could also support research into learning generalist piano playing skills or few-shot imitation learning of skilled movements.
Critical Analysis
The paper does a thorough job of describing the RP1M dataset and its potential applications. However, it does not address some potential limitations or caveats of the dataset:
- The dataset only includes recordings of professional pianists, so it may not capture the full range of hand motions and coordination strategies used by pianists at different skill levels.
- The data was collected in a controlled laboratory setting, which may not fully reflect the real-world conditions and constraints involved in piano playing.
- The dataset does not include any information about the musical context or expressiveness of the piano performances, which could be important for training AI systems to play the piano in a musically meaningful way.
Additionally, the paper could have discussed the potential risks or ethical considerations around using such a large dataset of human movement data, especially for applications involving robots and automation.
Conclusion
The RP1M dataset represents a significant advancement in the availability of large-scale, high-quality motion capture data for piano playing. This resource has the potential to enable substantial progress in the development of dexterous robot manipulation capabilities, as well as research into generalist piano playing skills and few-shot imitation learning of skilled movements.
While the dataset has some limitations, the researchers have made an important contribution to the field by providing a valuable tool for advancing research in these areas. As the use of this dataset grows, it will be crucial for the research community to carefully consider the ethical implications and potential risks involved in applying these technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
RP1M: A Large-Scale Motion Dataset for Piano Playing with Bi-Manual Dexterous Robot Hands
Yi Zhao, Le Chen, Jan Schneider, Quankai Gao, Juho Kannala, Bernhard Scholkopf, Joni Pajarinen, Dieter Buchler
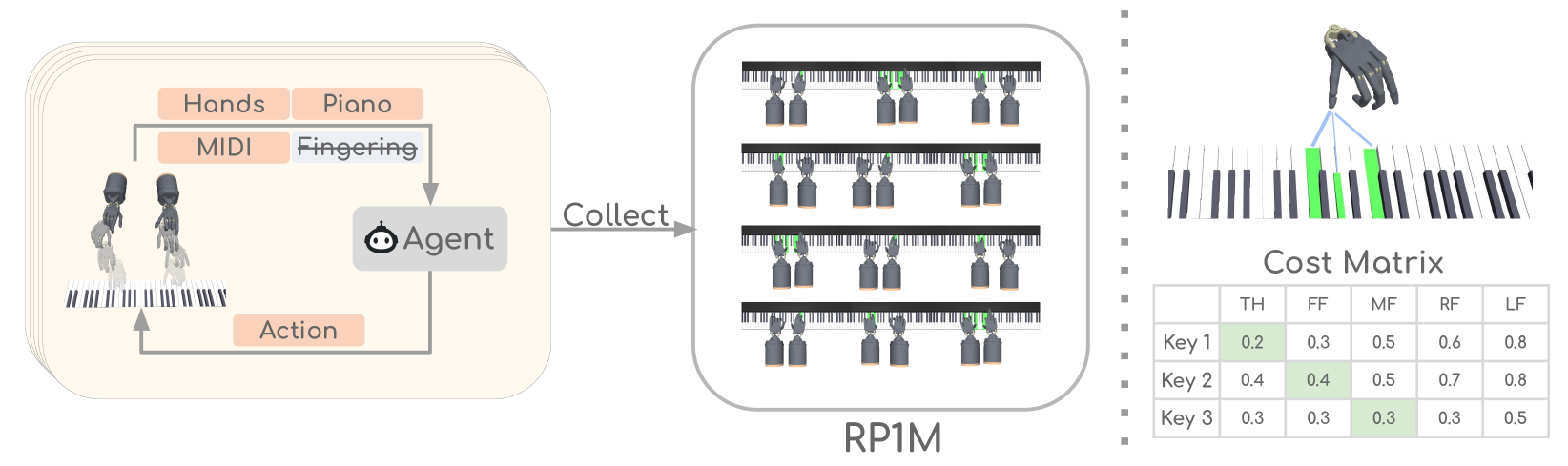
It has been a long-standing research goal to endow robot hands with human-level dexterity. Bi-manual robot piano playing constitutes a task that combines challenges from dynamic tasks, such as generating fast while precise motions, with slower but contact-rich manipulation problems. Although reinforcement learning based approaches have shown promising results in single-task performance, these methods struggle in a multi-song setting. Our work aims to close this gap and, thereby, enable imitation learning approaches for robot piano playing at scale. To this end, we introduce the Robot Piano 1 Million (RP1M) dataset, containing bi-manual robot piano playing motion data of more than one million trajectories. We formulate finger placements as an optimal transport problem, thus, enabling automatic annotation of vast amounts of unlabeled songs. Benchmarking existing imitation learning approaches shows that such approaches reach state-of-the-art robot piano playing performance by leveraging RP1M.
Read more8/21/2024

0
PianoMotion10M: Dataset and Benchmark for Hand Motion Generation in Piano Performance
Qijun Gan, Song Wang, Shengtao Wu, Jianke Zhu
Recently, artificial intelligence techniques for education have been received increasing attentions, while it still remains an open problem to design the effective music instrument instructing systems. Although key presses can be directly derived from sheet music, the transitional movements among key presses require more extensive guidance in piano performance. In this work, we construct a piano-hand motion generation benchmark to guide hand movements and fingerings for piano playing. To this end, we collect an annotated dataset, PianoMotion10M, consisting of 116 hours of piano playing videos from a bird's-eye view with 10 million annotated hand poses. We also introduce a powerful baseline model that generates hand motions from piano audios through a position predictor and a position-guided gesture generator. Furthermore, a series of evaluation metrics are designed to assess the performance of the baseline model, including motion similarity, smoothness, positional accuracy of left and right hands, and overall fidelity of movement distribution. Despite that piano key presses with respect to music scores or audios are already accessible, PianoMotion10M aims to provide guidance on piano fingering for instruction purposes. The dataset and source code can be accessed at https://agnjason.github.io/PianoMotion-page.
Read more6/14/2024

0
Empowering Embodied Manipulation: A Bimanual-Mobile Robot Manipulation Dataset for Household Tasks
Tianle Zhang, Dongjiang Li, Yihang Li, Zecui Zeng, Lin Zhao, Lei Sun, Yue Chen, Xuelong Wei, Yibing Zhan, Lusong Li, Xiaodong He
The advancements in embodied AI are increasingly enabling robots to tackle complex real-world tasks, such as household manipulation. However, the deployment of robots in these environments remains constrained by the lack of comprehensive bimanual-mobile robot manipulation data that can be learned. Existing datasets predominantly focus on single-arm manipulation tasks, while the few dual-arm datasets available often lack mobility features, task diversity, comprehensive sensor data, and robust evaluation metrics; they fail to capture the intricate and dynamic nature of household manipulation tasks that bimanual-mobile robots are expected to perform. To overcome these limitations, we propose BRMData, a Bimanual-mobile Robot Manipulation Dataset specifically designed for household applications. BRMData encompasses 10 diverse household tasks, including single-arm and dual-arm tasks, as well as both tabletop and mobile manipulations, utilizing multi-view and depth-sensing data information. Moreover, BRMData features tasks of increasing difficulty, ranging from single-object to multi-object grasping, non-interactive to human-robot interactive scenarios, and rigid-object to flexible-object manipulation, closely simulating real-world household applications. Additionally, we introduce a novel Manipulation Efficiency Score (MES) metric to evaluate both the precision and efficiency of robot manipulation methods in household tasks. We thoroughly evaluate and analyze the performance of advanced robot manipulation learning methods using our BRMData, aiming to drive the development of bimanual-mobile robot manipulation technologies. The dataset is now open-sourced and available at https://embodiedrobot.github.io/.
Read more6/7/2024

0
PianoMime: Learning a Generalist, Dexterous Piano Player from Internet Demonstrations
Cheng Qian, Julen Urain, Kevin Zakka, Jan Peters
In this work, we introduce PianoMime, a framework for training a piano-playing agent using internet demonstrations. The internet is a promising source of large-scale demonstrations for training our robot agents. In particular, for the case of piano-playing, Youtube is full of videos of professional pianists playing a wide myriad of songs. In our work, we leverage these demonstrations to learn a generalist piano-playing agent capable of playing any arbitrary song. Our framework is divided into three parts: a data preparation phase to extract the informative features from the Youtube videos, a policy learning phase to train song-specific expert policies from the demonstrations and a policy distillation phase to distil the policies into a single generalist agent. We explore different policy designs to represent the agent and evaluate the influence of the amount of training data on the generalization capability of the agent to novel songs not available in the dataset. We show that we are able to learn a policy with up to 56% F1 score on unseen songs.
Read more7/26/2024