Human Stress Response and Perceived Safety during Encounters with Quadruped Robots

0
Sign in to get full access
Overview
- This paper examines how humans respond to and perceive their safety during encounters with quadruped robots.
- The researchers conducted experiments to measure physiological stress responses and survey participants' feelings of safety when interacting with different robot behaviors.
- The findings provide insights into human-robot interaction and have implications for the design and deployment of quadruped robots in public spaces.
Plain English Explanation
The researchers wanted to understand how people react, both physically and emotionally, when they encounter four-legged robots in the real world. To do this, they had participants interact with robot prototypes and measured things like their heart rate and sweat levels to see how stressed they became. They also asked the participants questions about how safe they felt during the interactions.
The goal was to get a better sense of how humans perceive the safety of these types of robots, and how the robots' behavior and movements might impact those perceptions. This information could help designers create quadruped robots that are more comfortable and reassuring for people to be around as they become more common in public spaces like parks or shopping malls. [Link to paper on safe human-robot interaction: https://aimodels.fyi/papers/arxiv/safe-haptic-teleoperations-admittance-controlled-robots-virtualization]
Technical Explanation
The researchers conducted a series of experiments where participants interacted with a quadruped robot prototype in a controlled lab setting. They measured the participants' physiological stress responses, including heart rate and skin conductance, as the robot exhibited different behaviors like approaching, standing still, or moving away. Participants also completed surveys to assess their perceived safety and comfort levels during the interactions.
The results showed that certain robot behaviors, like quickly approaching the participant, elicited stronger stress responses. Participants also reported feeling less safe when the robot was in close proximity or moving quickly. However, the researchers found that these negative responses could be mitigated by having the robot move more slowly and maintain a greater distance from the participant. [Link to paper on motion prediction for safe human-robot interaction: https://aimodels.fyi/papers/arxiv/motion-prediction-gaussian-processes-safe-human-robot]
Critical Analysis
The study provides valuable insights into how humans react to and perceive the safety of quadruped robots, but there are some limitations to consider. The experiments were conducted in a controlled lab environment, which may not fully reflect real-world interactions where there could be more distractions or unexpected elements. Additionally, the sample size was relatively small, so the findings may not be generalizable to broader populations.
Further research is needed to explore how factors like cultural background, previous robot exposure, or the specific context of the interaction might influence people's responses. There is also a need to study long-term acceptance and comfort levels as quadruped robots become more common in public spaces. [Link to paper on using 3D LIDAR for safe physical human-robot interaction: https://aimodels.fyi/papers/arxiv/using-3-d-lidar-data-safe-physical]
Conclusion
This study provides important insights into the human stress response and perceived safety during encounters with quadruped robots. The findings suggest that robot designers should carefully consider factors like movement speed and proximity when developing these types of robots for public use, in order to create a more comfortable and reassuring experience for people. As quadruped robots become more prevalent, continued research in this area will be crucial for ensuring safe and ethical human-robot interactions. [Link to paper on a longitudinal study of child wellbeing assessment via online platforms: https://aimodels.fyi/papers/arxiv/longitudinal-study-child-wellbeing-assessment-via-online]
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Human Stress Response and Perceived Safety during Encounters with Quadruped Robots
Ryan Gupta, Hyonyoung Shin, Emily Norman, Keri K. Stephens, Nanshu Lu, Luis Sentis
Despite the rise of mobile robot deployments in home and work settings, perceived safety of users and bystanders is understudied in the human-robot interaction (HRI) literature. To address this, we present a study designed to identify elements of a human-robot encounter that correlate with observed stress response. Stress is a key component of perceived safety and is strongly associated with human physiological response. In this study a Boston Dynamics Spot and a Unitree Go1 navigate autonomously through a shared environment occupied by human participants wearing multimodal physiological sensors to track their electrocardiography (ECG) and electrodermal activity (EDA). The encounters are varied through several trials and participants self-rate their stress levels after each encounter. The study resulted in a multidimensional dataset archiving various objective and subjective aspects of a human-robot encounter, containing insights for understanding perceived safety in such encounters. To this end, acute stress responses were decoded from the human participants' ECG and EDA and compared across different human-robot encounter conditions. Statistical analysis of data indicate that on average (1) participants feel more stress during encounters compared to baselines, (2) participants feel more stress encountering multiple robots compared to a single robot and (3) participants stress increases during navigation behavior compared with search behavior.
Read more6/7/2024

0
Human Reactions to Incorrect Answers from Robots
Ponkoj Chandra Shill, Md. Azizul Hakim, Muhammad Jahanzeb Khan, Bashira Akter Anima
As robots grow more and more integrated into numerous industries, it is critical to comprehend how humans respond to their failures. This paper systematically studies how trust dynamics and system design are affected by human responses to robot failures. The three-stage survey used in the study provides a thorough understanding of human-robot interactions. While the second stage concentrates on interaction details, such as robot precision and error acknowledgment, the first stage collects demographic data and initial levels of trust. In the last phase, participants' perceptions are examined after the encounter, and trust dynamics, forgiveness, and propensity to suggest robotic technologies are evaluated. Results show that participants' trust in robotic technologies increased significantly when robots acknowledged their errors or limitations to participants and their willingness to suggest robots for activities in the future points to a favorable change in perception, emphasizing the role that direct engagement has in influencing trust dynamics. By providing useful advice for creating more sympathetic, responsive, and reliable robotic systems, the study advances the science of human-robot interaction and promotes a wider adoption of robotic technologies.
Read more7/8/2024
0
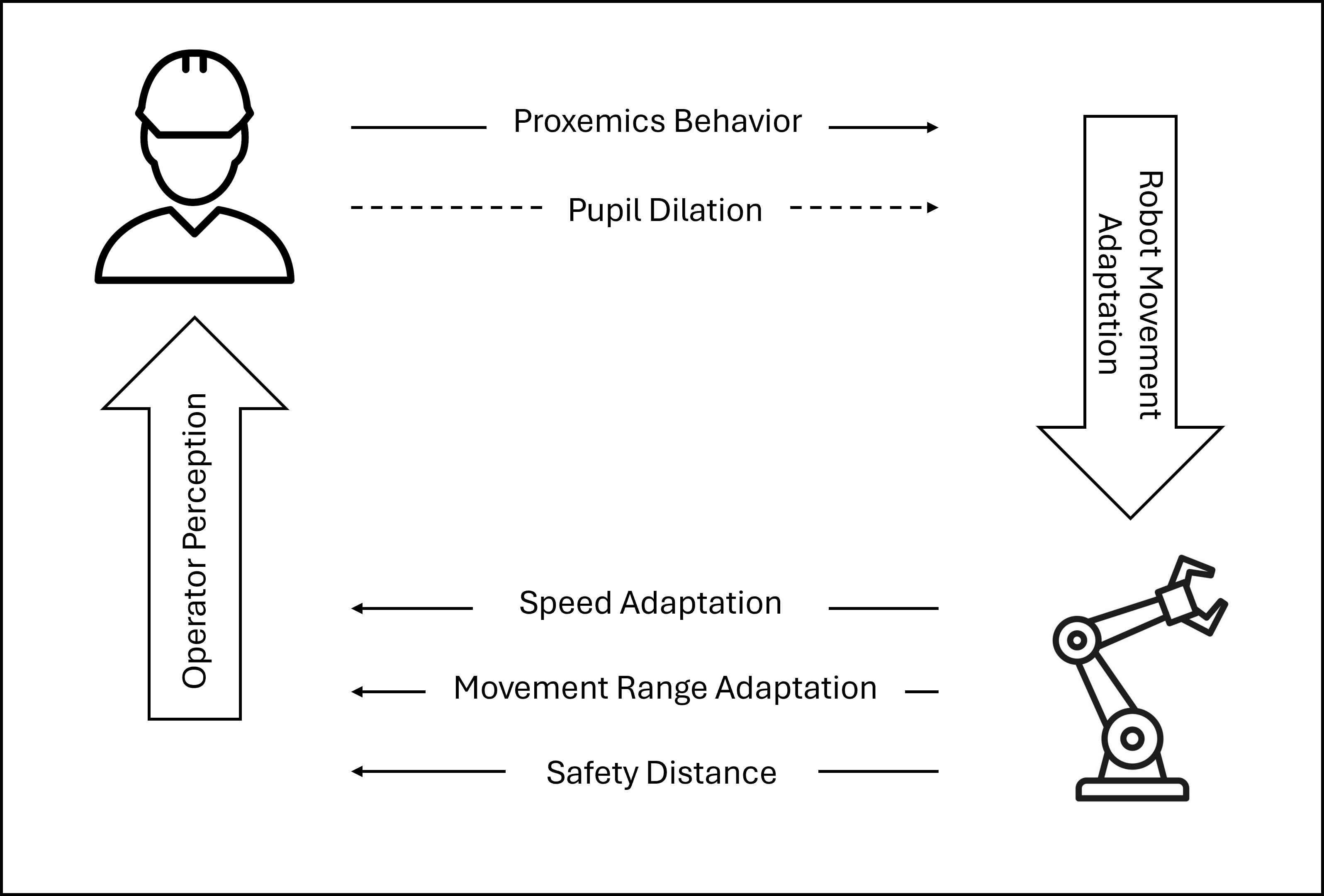
New!Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Damian Hostettler, Simon Mayer, Jan Liam Albert, Kay Erik Jenss, Christian Hildebrand
Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Read more9/17/2024
🤔
0
Understanding Dynamic Human-Robot Proxemics in the Case of Four-Legged Canine-Inspired Robots
Xiangmin Xu, Emma Liying Li, Mohamed Khamis, Guodong Zhao, Robin Bretin
Recently, quadruped robots have been well developed with potential applications in different areas, such as care homes, hospitals, and other social areas. To ensure their integration in such social contexts, it is essential to understand people's proxemic preferences around such robots. In this paper, we designed a human-quadruped-robot interaction study (N = 32) to investigate the effect of 1) different facing orientations and 2) the gaze of a moving robot on human proxemic distance. Our work covers both static and dynamic interaction scenarios. We found a statistically significant effect of both the robot's facing direction and its gaze on preferred personal distances. The distances humans established towards certain robot behavioral modes reflect their attitudes, thereby guiding the design of future autonomous robots.
Read more9/17/2024