Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration

0
Sign in to get full access
Overview
- The paper explores the design and evaluation of an adaptive industrial robot system that aims to improve safety and comfort in human-robot collaboration.
- The system uses real-time monitoring of human physiological signals and proxemics to adjust the robot's behavior and motion.
- The researchers conducted a user study to assess the system's impact on user experience, safety, and task performance.
Plain English Explanation
The researchers have developed an adaptive industrial robot that can adjust its behavior and motion in real-time based on the user's physiological signals and proximity. The goal is to make human-robot collaboration safer and more comfortable.
Traditionally, industrial robots operate at high speeds and with little regard for the humans working around them. This can be intimidating and even dangerous for the human workers. The researchers wanted to create a robot that can sense the user's state and adjust its actions accordingly, to ensure the user feels safe and at ease.
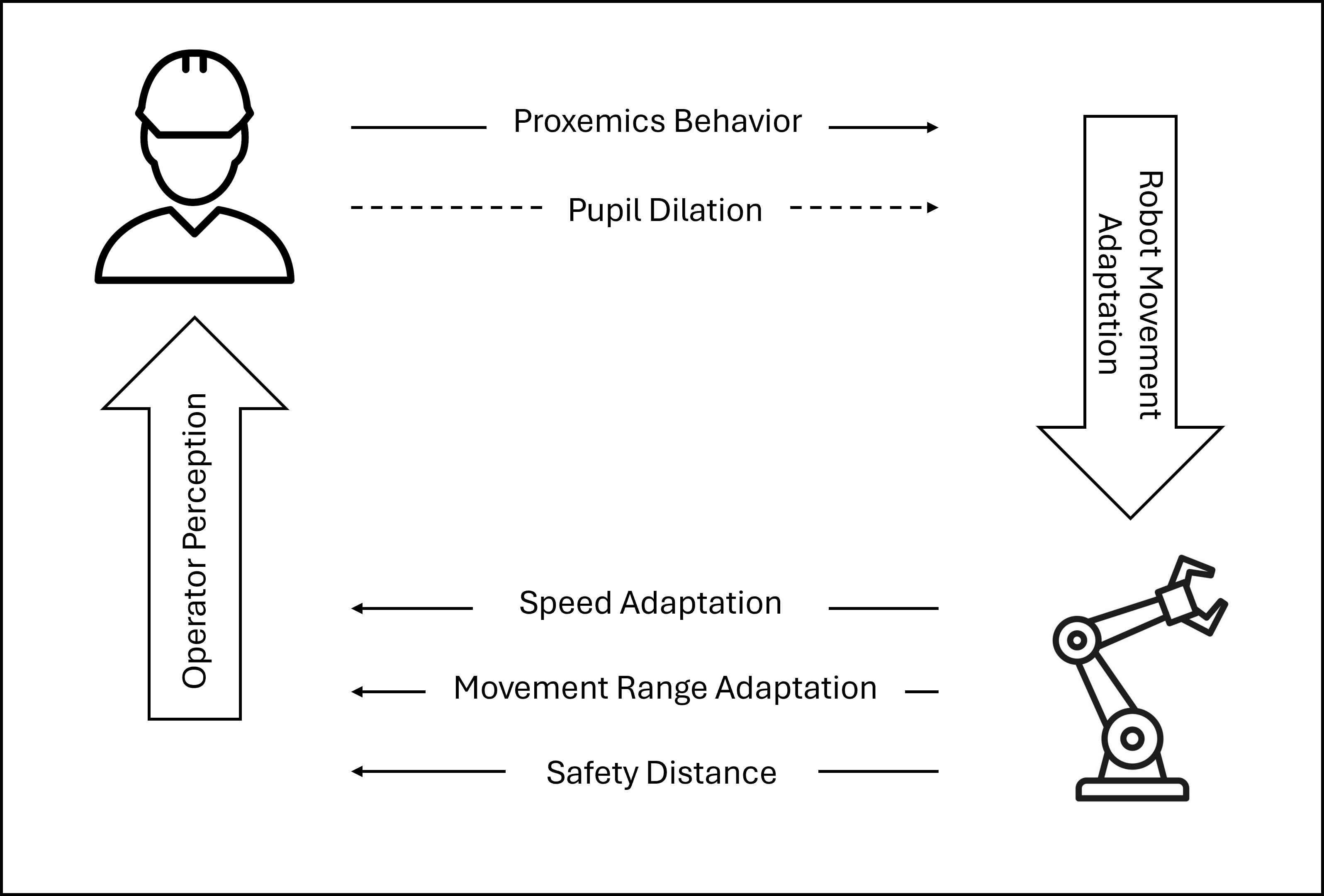
The system monitors the user's pupillometry (changes in pupil size) and proxemics (physical distance between the user and robot) in real-time. Based on this data, the robot can slow down, change direction, or take other measures to adapt its behavior and keep the user comfortable.
The researchers conducted a user study to evaluate the system. They had participants perform tasks while interacting with the adaptive robot, and measured factors like user experience, safety, and task performance. The results suggest the adaptive robot system can indeed improve safety and comfort in human-robot collaboration without negatively impacting task efficiency.
Technical Explanation
The researchers developed an adaptive industrial robot system that leverages real-time monitoring of human physiological signals and proxemics to adjust the robot's behavior and motion.
The system uses eye-tracking to measure the user's pupillometry - changes in pupil size that indicate cognitive load and emotional state. It also tracks the proxemics between the user and the robot, monitoring their physical distance and relative positioning.
Based on this real-time data, the robot can adapt its motion trajectory, speed, and other parameters to maintain a safe and comfortable distance from the user. For example, if the user's pupil size indicates increased stress or anxiety, the robot may slow down or alter its path to be less intrusive.
The researchers evaluated the adaptive robot system through a user study. Participants performed collaborative assembly tasks with the robot under both adaptive and non-adaptive conditions. The researchers measured factors like user experience, perceived safety, task performance, and physiological responses.
The results showed that the adaptive robot system significantly improved user experience and perceived safety compared to the non-adaptive version, without negatively impacting task efficiency. Participants reported feeling more comfortable and less stressed when interacting with the adaptive robot.
Critical Analysis
The paper presents a comprehensive evaluation of the adaptive robot system, including both quantitative performance metrics and qualitative user feedback. The researchers acknowledge some limitations, such as the small sample size and the use of a simulated rather than a real industrial environment.
One area that could be explored further is the generalizability of the system. The researchers used a specific set of tasks and a single robot model, so it would be valuable to assess how well the adaptive behavior transfers to other industrial scenarios and robot platforms.
Additionally, the paper does not delve deeply into the technical details of the robot's adaptation algorithms or the specific thresholds used for adjusting its behavior. More transparency around these elements would allow for better understanding and potential replication of the system.
Overall, the research demonstrates a promising approach to enhancing safety and comfort in human-robot collaboration, which has significant implications for the adoption and deployment of industrial robots in shared workspaces.
Conclusion
The adaptive industrial robot system developed in this paper represents an important step towards improving the integration of robots into human-centric work environments. By leveraging real-time monitoring of user physiological signals and proxemics, the system can dynamically adjust the robot's behavior to maintain a safe and comfortable interaction.
The positive results from the user study suggest that this adaptive approach can enhance the user experience and perceived safety without compromising task performance. As industrial robots become more ubiquitous, techniques like these will be crucial for fostering effective and seamless human-robot collaboration.
Future research could explore expanding the system's capabilities, such as incorporating additional sensor modalities or exploring more sophisticated adaptation strategies. Ultimately, this work contributes to the broader goal of developing robotic systems that can safely and intuitively work alongside human workers in industrial settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
New!Real-Time Adaptive Industrial Robots: Improving Safety And Comfort In Human-Robot Collaboration
Damian Hostettler, Simon Mayer, Jan Liam Albert, Kay Erik Jenss, Christian Hildebrand
Industrial robots become increasingly prevalent, resulting in a growing need for intuitive, comforting human-robot collaboration. We present a user-aware robotic system that adapts to operator behavior in real time while non-intrusively monitoring physiological signals to create a more responsive and empathetic environment. Our prototype dynamically adjusts robot speed and movement patterns while measuring operator pupil dilation and proximity. Our user study compares this adaptive system to a non-adaptive counterpart, and demonstrates that the adaptive system significantly reduces both perceived and physiologically measured cognitive load while enhancing usability. Participants reported increased feelings of comfort, safety, trust, and a stronger sense of collaboration when working with the adaptive robot. This highlights the potential of integrating real-time physiological data into human-robot interaction paradigms. This novel approach creates more intuitive and collaborative industrial environments where robots effectively 'read' and respond to human cognitive states, and we feature all data and code for future use.
Read more9/17/2024

0
Collaborating for Success: Optimizing System Efficiency and Resilience Under Agile Industrial Settings
Sunny Katyara, Suchita Sharma, Praveen Damacharla, Carlos Garcia Santiago, Francis O'Farrell, Philip Long
Designing an efficient and resilient human-robot collaboration strategy that not only upholds the safety and ergonomics of shared workspace but also enhances the performance and agility of collaborative setup presents significant challenges concerning environment perception and robot control. In this research, we introduce a novel approach for collaborative environment monitoring and robot motion regulation to address this multifaceted problem. Our study proposes novel computation and division of safety monitoring zones, adhering to ISO 13855 and TS 15066 standards, utilizing 2D lasers information. These zones are not only configured in the standard three-layer arrangement but are also expanded into two adjacent quadrants, thereby enhancing system uptime and preventing unnecessary deadlocks. Moreover, we also leverage 3D visual information to track dynamic human articulations and extended intrusions. Drawing upon the fused sensory data from 2D and 3D perceptual spaces, our proposed hierarchical controller stably regulates robot velocity, validated using Lasalle in-variance principle. Empirical evaluations demonstrate that our approach significantly reduces task execution time and system response delay, resulting in improved efficiency and resilience within collaborative settings.
Read more9/14/2024

0
MoveTouch: Robotic Motion Capturing System with Wearable Tactile Display to Achieve Safe HRI
Ali Alabbas, Miguel Altamirano Cabrera, Mohamed Sayed, Oussama Alyounes, Qian Liu, Dzmitry Tsetserukou
The collaborative robot market is flourishing as there is a trend towards simplification, modularity, and increased flexibility on the production line. But when humans and robots are collaborating in a shared environment, the safety of humans should be a priority. We introduce a novel wearable robotic system to enhance safety during Human-Robot Interaction (HRI). The proposed wearable robot is designed to hold a fiducial marker and maintain its visibility to a motion capture system, which, in turn, localizes the user's hand with good accuracy and low latency and provides vibrotactile feedback to the user's wrist. The vibrotactile feedback guides the user's hand movement during collaborative tasks in order to increase safety and enhance collaboration efficiency. A user study was conducted to assess the recognition and discriminability of ten designed vibration patterns applied to the upper (dorsal) and the down (volar) parts of the user's wrist. The results show that the pattern recognition rate on the volar side was higher, with an average of 75.64% among all users. Four patterns with a high recognition rate were chosen to be incorporated into our system. A second experiment was carried out to evaluate users' response to the chosen patterns in real-world collaborative tasks. Results show that all participants responded to the patterns correctly, and the average response time for the patterns was between 0.24 and 2.41 seconds.
Read more7/9/2024

0
PRO-MIND: Proximity and Reactivity Optimisation of robot Motion to tune safety limits, human stress, and productivity in INDustrial settings
Marta Lagomarsino, Marta Lorenzini, Elena De Momi, Arash Ajoudani
Despite impressive advancements of industrial collaborative robots, their potential remains largely untapped due to the difficulty in balancing human safety and comfort with fast production constraints. To help address this challenge, we present PRO-MIND, a novel human-in-the-loop framework that leverages valuable data about the human co-worker to optimise robot trajectories. By estimating human attention and mental effort, our method dynamically adjusts safety zones and enables on-the-fly alterations of the robot path to enhance human comfort and optimal stopping conditions. Moreover, we formulate a multi-objective optimisation to adapt the robot's trajectory execution time and smoothness based on the current human psycho-physical stress, estimated from heart rate variability and frantic movements. These adaptations exploit the properties of B-spline curves to preserve continuity and smoothness, which are crucial factors in improving motion predictability and comfort. Evaluation in two realistic case studies showcases the framework's ability to restrain the operators' workload and stress and to ensure their safety while enhancing human-robot productivity. Further strengths of PRO-MIND include its adaptability to each individual's specific needs and sensitivity to variations in attention, mental effort, and stress during task execution.
Read more9/12/2024